当前位置:网站首页>Canoe the second simulation engineering xvehicle 3 CAPL programming (operation)
Canoe the second simulation engineering xvehicle 3 CAPL programming (operation)
2022-07-04 10:50:00 【picoasis】
The main content of this paper is :XVehicle Node functions and corresponding CAPL Detailed procedure .
This article is from 《CANoe Development from entry to mastery 》.
Catalog
X-Vehicle Engineering node - Signal diagram
X-Vehicle Engineering node - Signal diagram
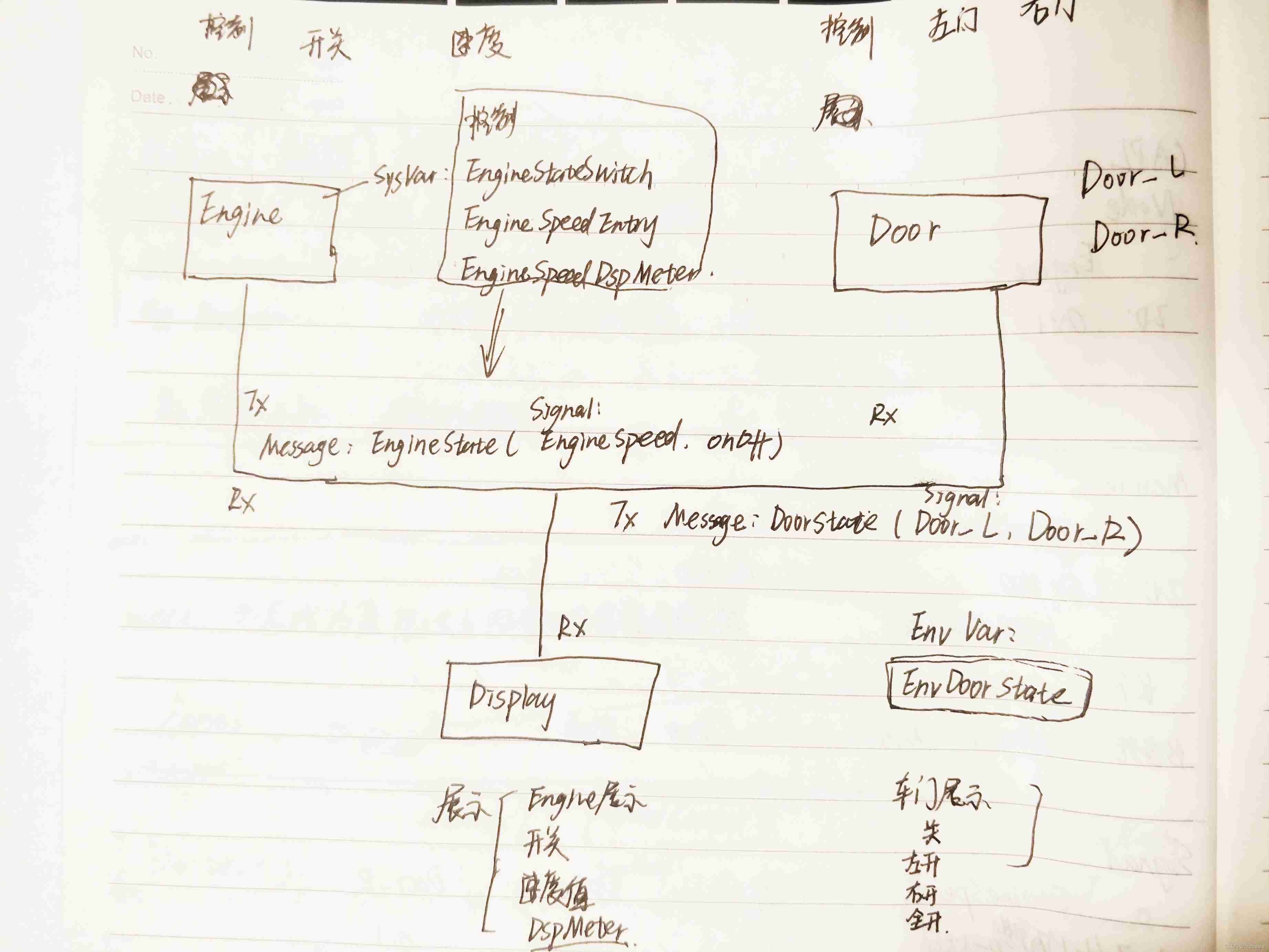
( Let's take a look at the picture )
environment variable : Node IO The signal , It can be used for panel or real IO
System variables :ECU Node internal variables
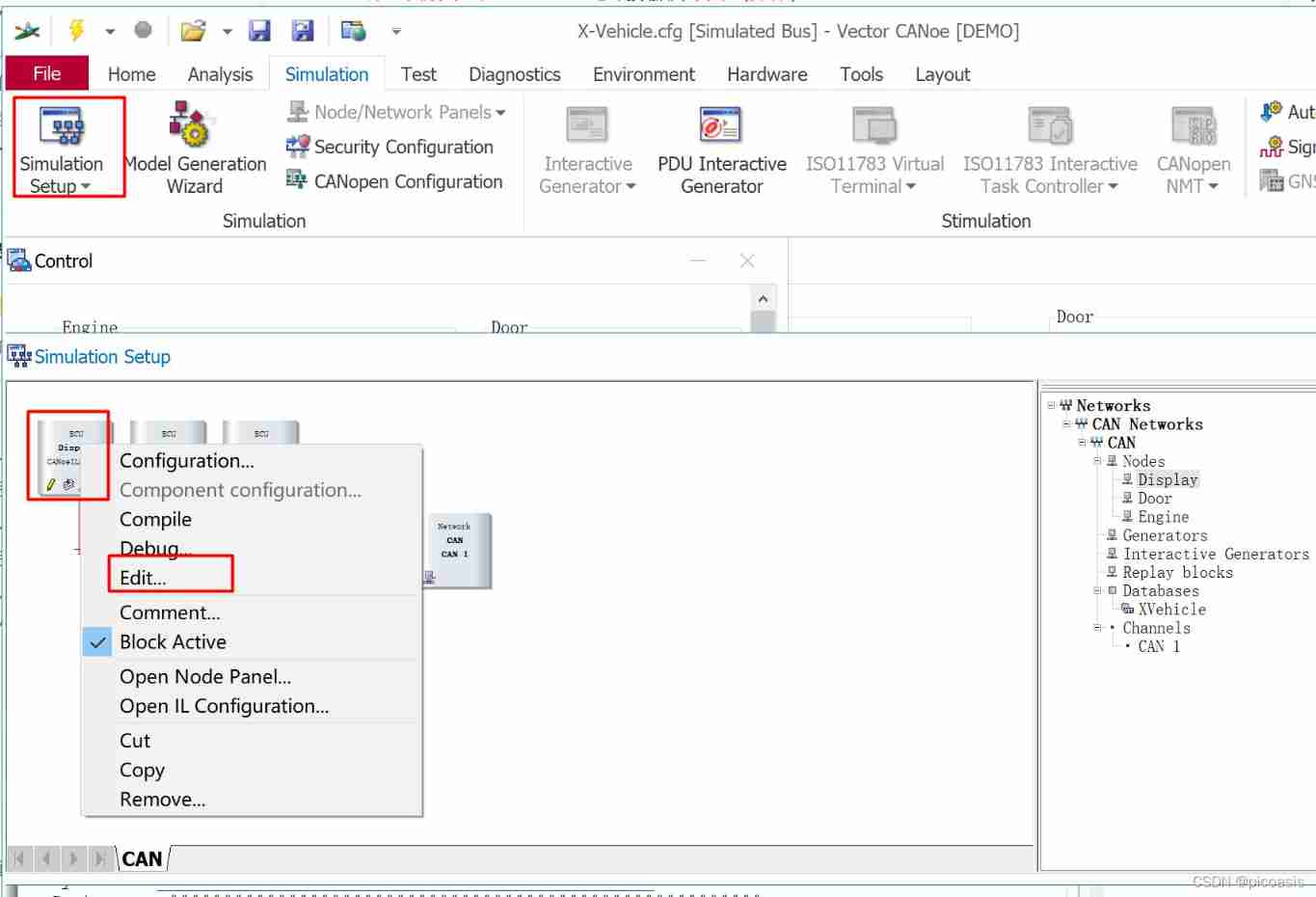
establish CAPL file
simulation setup Interface ECU When editing the database , The database file that will be generated , And the corresponding nodes Import simulation setup Generate .
stay simulation setup Interface , In the corresponding ECU Right click , Separately build engine.can, door.can, display.can, Save in nodes Under the folder .
Engine Node CAPL
engine Nodes need to be operated according to users , Sending signal , Corresponding ECU The function is :
- On receiving ‘ Turn on and off the engine ’ In operation , take OnOff The signal Update to message EngineState On .
- When the engine speed changes , Judge whether it is necessary to EngineSpeed The signal is updated to the message EngineState On .
- If the engine is on On, Then update the message EngineState Of EngineSpeed The signal
- If the engine is off Off, Then the message EngineSpeed Should be 0
The code is as follows :
/*@!Encoding:936*/
/*
function :
1. When the engine switch acts , Update message EngineState Signal in OnOff
2. The logical relationship between engine switch and engine speed :
- When the engine is running , The engine speed can be updated
- When the engine is off , The engine speed is automatically set to 0
*/
includes
{
}
variables
{
}
// When the engine starts , Update the speed information of the message
On sysvar sysvar::Engine::EngineStateSwitch
{
$EngineState::OnOff = @this;
if(@this)
$EngineState::EngineSpeed = @sysvar::Engine::EngineSpeedEntry;
else
$EngineState::EngineSpeed = 0;
}
// When the speed control changes , Update the speed information of the message
On sysvar sysvar::Engine::EngineSpeedEntry
{
if(@sysvar::Engine::EngineStateSwitch){
$EngineState::EngineSpeed = @this;
}
}Door Node CAPL
Door Nodes are operated by users , Send the door opening message :
Send message :DoorState( The signal :Door_L,Door_R)
Because in Panel The message has been associated with the door switch control in the design , therefore CAPL This part of the code is not required in .
The following code is , Add some write Debug I / O function of window .
/*@!Encoding:936*/
/* function :
write Debug output function of window : By calling functions , Output information that users care about .
SetwriteDbgLevel Set functions and writeDbgLevel Output function
(1)key'0' Turn off debugging information output ,Key'1' Turn on debug information output
(2) Check the message DoorState The receiving direction of ,
- When the debugging information output function is turned on , It can be output to Write window
- Theoretically , node Door You should not receive messages sent by other nodes DoorState
*/
includes
{
}
variables
{
int gDebugCounterTX = 0;
int gDebugCounterTXRQ = 0;
int gDebugCounterRX = 0;
}
On start
{
setWriteDbgLevel(0);// Set up debugLevel by 0, No output debug Information
}
// Check the message DoorState The transmission of Direction
On message DoorState
{
// If the direction is TX
if (this.dir == TX)
{
gDebugCounterTX++;
if(gDebugCounterTX==10)
{
writeDbgLevel(1,"DoorState TX recieved by node %NODE_NAME% ");
gDebugCounterTX = 0;
}
}
// If the direction is TXRQ
if (this.dir == TXREQUEST)
{
gDebugCounterTXRQ++;
if(gDebugCounterTXRQ==10)
{
writeDbgLevel(1,"DoorState TXREQUEST recieved by node %NODE_NAME% ");
gDebugCounterTXRQ = 0;
}
}
// If the direction is RX
if (this.dir == RX)
{
gDebugCounterRX++;
if(gDebugCounterRX==10)
{
writeDbgLevel(1,"Error: DoorState RX recieved by node %NODE_NAME% ");
gDebugCounterRX = 0;
}
}
}
// Processing keys '0' event : prohibit debug Information output
On key '0'
{
setWriteDbgLevel(0);
}
// Processing keys '1' event : Turn on debug Information output
On key '1'
{
setWriteDbgLevel(1);
}Display Node CAPL
Display The node receives data from Door and Engine Message of , Read message signal , Displayed on the panel .
therefore ,Display Its function is to monitor message events .
Received EngineState When the message , Read EngineState The signal , Displayed on the instrument panel and digital meter respectively .
Received DoorState When the message , Read Door_L、Door_R The signal , Assign to your own environment variable , Control the display of door opening status .
/*@!Encoding:936*/
/* Receive message , And show it on the panel .
Engine on state : Associated with the signal EngineState::EngineStateSwitch, It will update automatically
Engine speed Exhibition :on message EngineState
Door status display :on message DoorState
*/
includes
{
}
variables
{
}
on message EngineState
{
if (this.dir == RX)
{
@sysvar::Engine::EngineSpeedDspMeter = this.EngineSpeed/1000.0;
}
}
on message DoorState
{
if (this.dir == RX)
{
@EnvDoorState = this.Door_L + this.Door_R*2;
}
}thus , The program of the node is edited .
XVehicle The project is finished . The normal operation is as follows .( Another day )
END
边栏推荐
- First article
- Huge number (C language)
- /*Rewrite the program, find the value of the element, and return the iterator 9.13: pointing to the found element. Make sure that the program works correctly when the element you are looking for does
- Terms related to hacker technology
- Aike AI frontier promotion (2.14)
- Using Lua to realize 99 multiplication table
- Design and common methods of test case documents
- [testing theory] thinking about testing profession
- leetcode1229. Schedule the meeting
- Write a program to judge whether the elements contained in a vector < int> container are 9.20: exactly the same as those in a list < int> container.
猜你喜欢
Four characteristics and isolation levels of database transactions
DCL statement of MySQL Foundation
DDL statement of MySQL Foundation
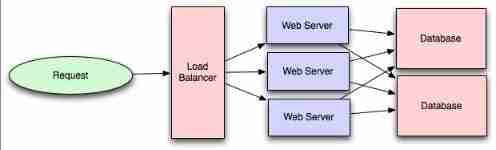
Introduction to extensible system architecture

The most detailed teaching -- realize win10 multi-user remote login to intranet machine at the same time -- win10+frp+rdpwrap+ Alibaba cloud server
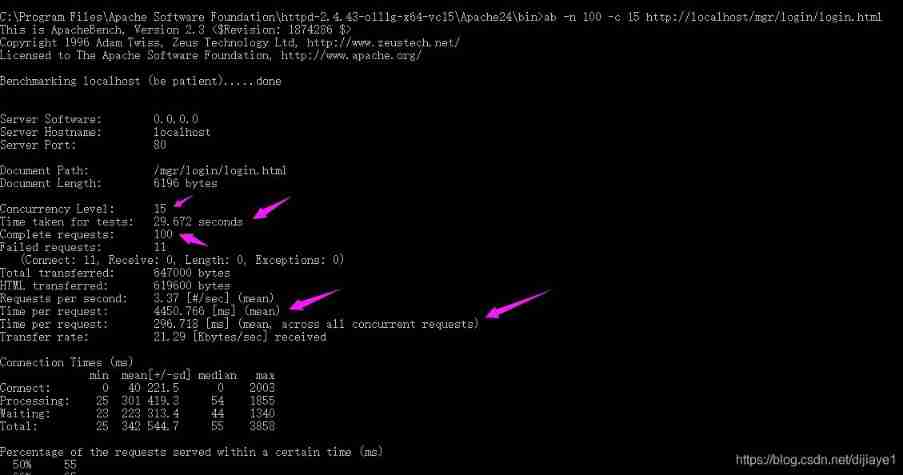
Ten key performance indicators of software applications
What if the book written is too popular? Author of "deep reinforcement learning" at Peking University: then open the download
![[test theory] test process management](/img/d2/65865dffacf38d9a8be720868b75f0.jpg)
[test theory] test process management
Learning XML DOM -- a typical model for parsing XML documents
TS type gymnastics: illustrating a complex advanced type
随机推荐
[Galaxy Kirin V10] [desktop] FTP common scene setup
[Galaxy Kirin V10] [desktop] build NFS to realize disk sharing
Read a piece of text into the vector object, and each word is stored as an element in the vector. Convert each word in the vector object to uppercase letters. Output the converted elements in the vect
C language - stack
Huge number multiplication (C language)
[Galaxy Kirin V10] [server] iSCSI deployment
Aike AI frontier promotion (2.14)
Error C4996 ‘WSAAsyncSelect‘: Use WSAEventSelect() instead or define _ WINSOCK_ DEPRECATED_ NO_ WARN
/*Write a function to open the file for input, read the contents of the file into the vector container of string class 8.9: type, and store each line as an element of the container object*/
Rhsca day 11 operation
MFC document view framework (relationship between classes)
DML statement of MySQL Foundation
[Galaxy Kirin V10] [server] grub default password
JMeter Foundation
183 sets of free resume templates to help everyone find a good job
leetcode1229. Schedule the meeting
Debug:==42==ERROR: AddressSanitizer: heap-buffer-overflow on address
The most detailed teaching -- realize win10 multi-user remote login to intranet machine at the same time -- win10+frp+rdpwrap+ Alibaba cloud server
RHCE day 3
Dichotomy search (C language)