当前位置:网站首页>Cloud computing technology hotspot
Cloud computing technology hotspot
2022-07-05 09:19:00 【Hua Weiyun】
Cloud computing technology hotspot
边栏推荐
- LeetCode 31. 下一个排列
- Rebuild my 3D world [open source] [serialization-2]
- Applet network data request
- LeetCode 496. 下一个更大元素 I
- Mengxin summary of LCs (longest identical subsequence) topics
- Explain NN in pytorch in simple terms CrossEntropyLoss
- 2309. The best English letters with both upper and lower case
- [ctfhub] Title cookie:hello guest only admin can get flag. (cookie spoofing, authentication, forgery)
- 生成对抗网络
- An article takes you into the world of cookies, sessions, and tokens
猜你喜欢
![[ctfhub] Title cookie:hello guest only admin can get flag. (cookie spoofing, authentication, forgery)](/img/78/d9d1a66fc239e7c62de1fce426d30d.jpg)
[ctfhub] Title cookie:hello guest only admin can get flag. (cookie spoofing, authentication, forgery)
LeetCode 31. 下一个排列
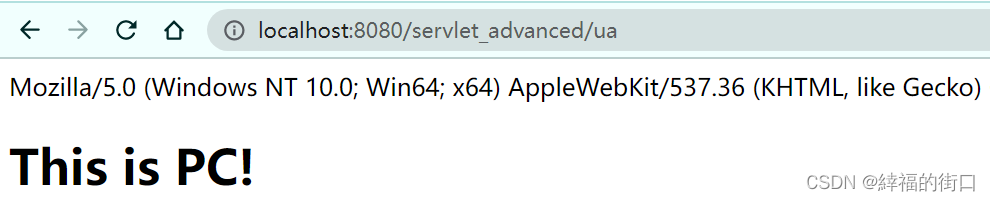
利用请求头开发多端应用

Wxml template syntax
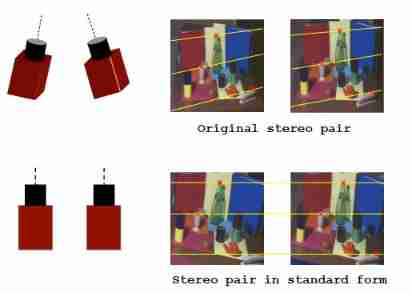
Introduction Guide to stereo vision (6): level constraints and polar correction of fusiello method
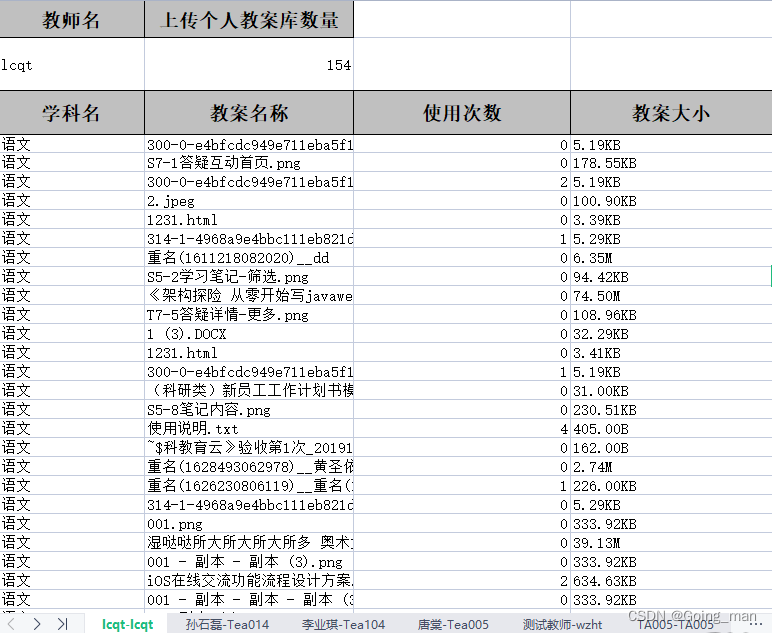
项目实战 | Excel导出功能
![[code practice] [stereo matching series] Classic ad census: (5) scan line optimization](/img/54/cb1373fbe7b21c5383580e8b638a2c.jpg)
[code practice] [stereo matching series] Classic ad census: (5) scan line optimization
Kotlin introductory notes (VIII) collection and traversal
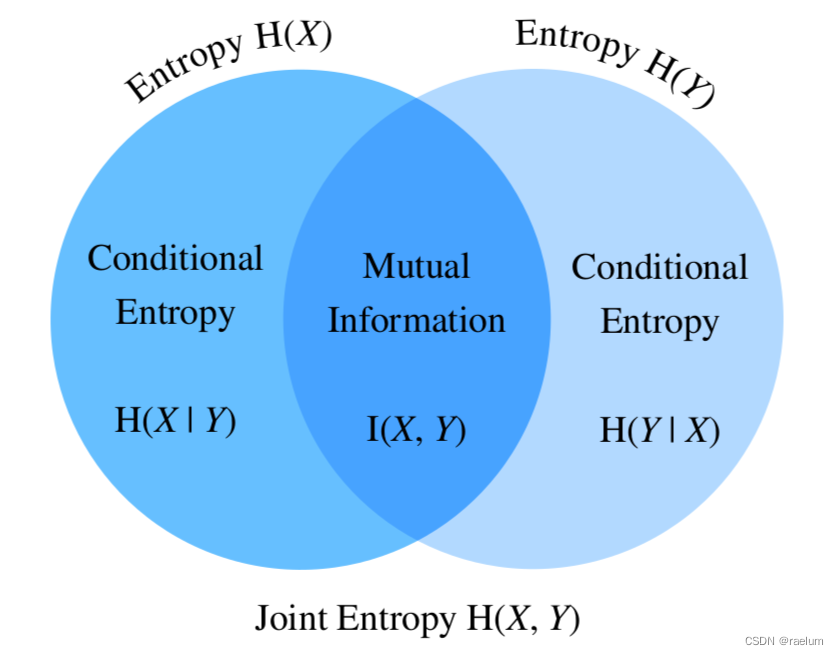
L'information et l'entropie, tout ce que vous voulez savoir est ici.

C语言-从键盘输入数组二维数组a,将a中3×5矩阵中第3列的元素左移到第0列,第3列以后的每列元素行依次左移,原来左边的各列依次绕到右边
随机推荐
OpenGL - Coordinate Systems
Shutter uses overlay to realize global pop-up
nodejs_ fs. writeFile
Summary of "reversal" problem in challenge Programming Competition
Applet global style configuration window
AUTOSAR从入门到精通100讲(103)-dbc文件的格式以及创建详解
uni-app 实现全局变量
Codeforces round 684 (Div. 2) e - green shopping (line segment tree)
阿里十年测试带你走进APP测试的世界
Driver's license physical examination hospital (114-2 hang up the corresponding hospital driver physical examination)
Solution to the problems of the 17th Zhejiang University City College Program Design Competition (synchronized competition)
Huber Loss
Kotlin introductory notes (II) a brief introduction to kotlin functions
Causes and appropriate analysis of possible errors in seq2seq code of "hands on learning in depth"
[code practice] [stereo matching series] Classic ad census: (4) cross domain cost aggregation
Uni app implements global variables
Multiple solutions to one problem, asp Net core application startup initialization n schemes [Part 1]
图神经网络+对比学习,下一步去哪?
Luo Gu p3177 tree coloring [deeply understand the cycle sequence of knapsack on tree]
STM32简易多级菜单(数组查表法)