当前位置:网站首页>基于DE2 115开发板驱动HC_SR04超声波测距模块【附源码】
基于DE2 115开发板驱动HC_SR04超声波测距模块【附源码】
2022-07-07 09:02:00 【青柠Miya】
目录
1. 实验平台与目的
DE2-E115 FPGA开发板 + Quartus + Modelsim
学习并掌握HC_SR04模块的使用
2. 实验要求
使用DE2开发板驱动HC_SR04模块,并将所测得数据显示到开发板上的数码管。
3. 实验原理
3.1. 理论原理
超声波原理:
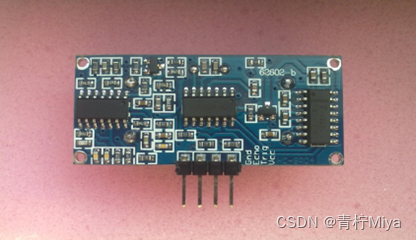
HC-SR04超声波测距模块可提供 2cm-400cm的非接触式距离感测功能,测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路。图1为HC-SR04外观,其基本工作原理为给予此超声波测距模块触发信号后模块发射超声波,当超声波投射到物体而反射回来时,模块输出回响信号,以触发信号和回响信号间的时间差,来判定物体的距离。
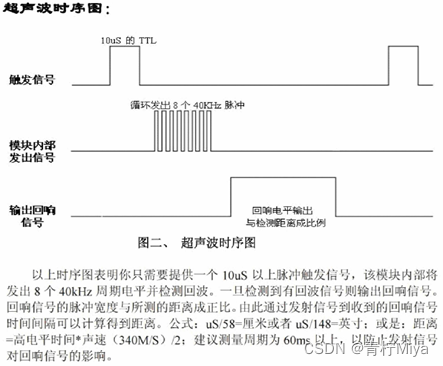
3.2. 硬件模块时序图
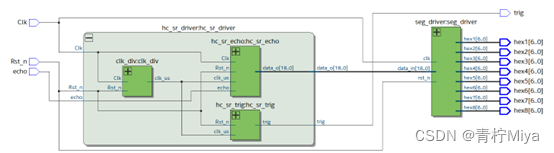
4. 系统架构设计
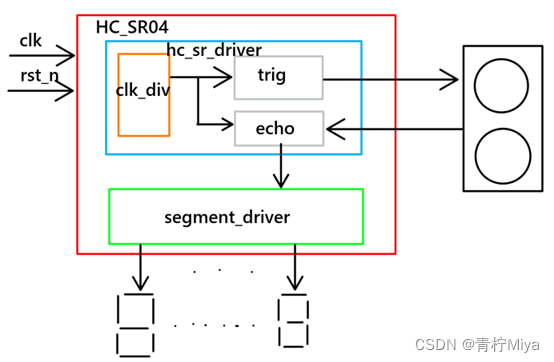
5. 模块说明
数码管显示驱动在之前已经做过,这里不再赘述。
5.1. hc_sr_driver端口信号列表
| 信号名 | 端口类型 | 端口位宽 | 功能说明 |
|---|---|---|---|
| Clk | I | 1 | 系统时钟,50MHz |
| Rst_n | I | 1 | 系统复位,低有效 |
| echo | I | 1 | 超声波模块回响信号,高电平持续时间/2即代表测试距离 |
| trig | O | 1 | 超声波模块触发测试信号 |
| data_o | O | 19 | 测得距离,单位厘米,保留三位小数 |
5.2. 状态转移图
本设计未涉及状态机。
5.3. 时序图
见章节2.2
5.4. 设计文件
/*================================================*\ Filename ﹕ Author ﹕ Description ﹕产生周期为1us的时钟信号 Called by ﹕ Revision History ﹕ mm/dd/202x Revision 1.0 Email﹕ Company﹕ \*================================================*/
module clk_div(
input wire Clk , //system clock 50MHz
input wire Rst_n , //reset ,low valid
output wire clk_us //
);
//Parameter Declarations
parameter CNT_MAX = 19'd50;//1us的计数值为 50 * Tclk(20ns)
//Interrnal wire/reg declarations
reg [5:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
//Logic Description
always @(posedge Clk or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt >= CNT_MAX - 19'd1;
assign clk_us = end_cnt;
endmodule
/*================================================*\ Filename ﹕ Author ﹕ Description ﹕超声波触发测距模块 波形周期300ms,前10us高电平 Called by ﹕ Revision History ﹕ mm/dd/202x Revision 1.0 Email﹕ Company﹕ \*================================================*/
module hc_sr_trig(
input wire clk_us , //system clock 1MHz
input wire Rst_n , //reset ,low valid
output wire trig //触发测距信号
);
//Parameter Declarations
parameter CYCLE_MAX = 19'd300_000;
//Interrnal wire/reg declarations
reg [18:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
//Logic Description
always @(posedge clk_us or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt >= CYCLE_MAX - 9'd1;
assign trig = cnt < 15 ? 1'b1 : 1'b0;
endmodule
/*================================================*\ Filename ﹕ Author ﹕ Description ﹕超声波检测距离模块 本模块理论测试距离 2cm~510cm 输出结果保留两位小数 Called by ﹕ Revision History ﹕ mm/dd/202x Revision 1.0 Email﹕ Company﹕ \*================================================*/
module hc_sr_echo(
input wire Clk , //clock 50MHz
input wire clk_us , //system clock 1MHz
input wire Rst_n , //reset ,low valid
input wire echo , //
output wire [18:00] data_o //检测距离,保留3位小数,*1000实现
);
/* S(um) = 17 * t --> x.abc cm */
//Parameter Declarations
parameter T_MAX = 16'd60_000;//510cm 对应计数值
//Interrnal wire/reg declarations
reg r1_echo,r2_echo; //边沿检测
wire echo_pos,echo_neg; //
reg [15:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
reg [18:00] data_r ;
//Logic Description
//如果使用clk_us 检测边沿,延时2us,差值过大
always @(posedge Clk or negedge Rst_n)begin
if(!Rst_n)begin
r1_echo <= 1'b0;
r2_echo <= 1'b0;
end
else begin
r1_echo <= echo;
r2_echo <= r1_echo;
end
end
assign echo_pos = r1_echo & ~r2_echo;
assign echo_neg = ~r1_echo & r2_echo;
always @(posedge clk_us or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= cnt;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin //echo 低电平 归零
cnt <= 'd0;
end
end
assign add_cnt = echo;
assign end_cnt = add_cnt && cnt >= T_MAX - 1; //超出最大测量范围则保持不变,极限
always @(posedge Clk or negedge Rst_n)begin
if(!Rst_n)begin
data_r <= 'd2;
end
else if(echo_neg)begin
data_r <= (cnt << 4) + cnt;
end
else begin
data_r <= data_r;
end
end //always end
assign data_o = data_r >> 1;
endmodule
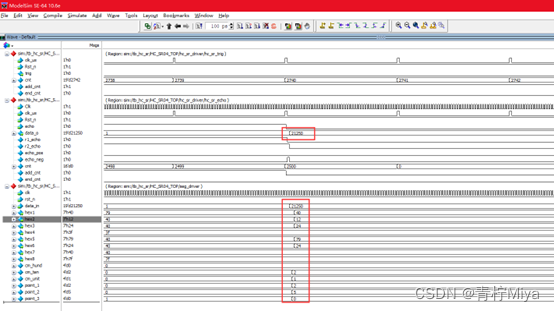
6. 仿真测试
/*================================================*\ Filename ﹕tb_hc_sr.v Author ﹕Adolph Description ﹕超声波驱动测试文件 Called by ﹕ Revision History ﹕ mm/dd/202x Revision 1.0 Email﹕ Company﹕ \*================================================*/
`timescale 1ns/1ns //仿真系统时间尺度定义
`define clk_period 20 //时钟周期参数定义
module tb_hc_sr();
//激励信号定义
reg Clk ;
reg Rst_n ;
reg echo; //
//响应信号定义
wire trig ;
wire [6:0] hex1 ;
wire [6:0] hex2 ;
wire [6:0] hex3 ;
wire [6:0] hex4 ;
wire [6:0] hex5 ;
wire [6:0] hex6 ;
wire [6:0] hex7 ;
wire [6:0] hex8 ;
//实例化
HC_SR04_TOP HC_SR04_TOP(
/*input */.Clk (Clk ), //system clock 50MHz
/*input */.Rst_n (Rst_n ), //reset ,low valid
/*input */.echo (echo ), //
/*output */.trig (trig ), //触发测距信号
/*output [6:0] */.hex1 (hex1 ), // -共阳极,低电平有效
/*output [6:0] */.hex2 (hex2 ), // -
/*output [6:0] */.hex3 (hex3 ), // -
/*output [6:0] */.hex4 (hex4 ), //连接符
/*output [6:0] */.hex5 (hex5 ), //cm -
/*output [6:0] */.hex6 (hex6 ), //cm -
/*output [6:0] */.hex7 (hex7 ), //cm -
/*output [6:0] */.hex8 (hex8 ) //熄灭
);
//产生时钟
initial Clk = 1'b0;
always #(`clk_period / 2) Clk = ~Clk;
//产生激励
initial begin
Rst_n = 1'b0;
echo = 1'b0;
#(`clk_period * 20 + 3);
Rst_n = 1'b1;
#(`clk_period * 20);
wait(HC_SR04_TOP.hc_sr_driver.hc_sr_trig.cnt == 240);
echo = 1'b1;//测试超声波信号发送完成,echo拉高
#(50 * `clk_period * 2500 + 7);
echo = 1'b0;
#(`clk_period * 200);
$stop(2);
end
endmodule
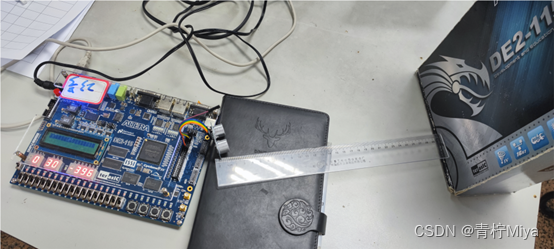
7. 板级验证与调试
8. 总结
经测,所测距离与实际距离一致,模块功能基本实现。
但是,本设计仅能测试4~249cm范围的距离,应是设计中echo模块的问题,留待后来人解决,所使用的数码管驱动为8位7段数码管,其内涉及到函数的使用,诸君若不曾接触,可细品一二。
贴代码的目的只是为了方便理解,如若成为CV战士,则失去了学习的意义,望诸君能有所收获。
边栏推荐
- Shardingsphere sub database and table examples (logical table, real table, binding table, broadcast table, single table)
- What is an intermediate network engineer? What is the main test and what is the use?
- 【推荐系统 01】Rechub
- seata 1.3.0 四種模式解决分布式事務(AT、TCC、SAGA、XA)
- Use of dotween
- Template initial level template
- 2021 summary and 2022 outlook
- 【STM32】实战3.1—用STM32与TB6600驱动器驱动42步进电机(一)
- Find the greatest common divisor and the least common multiple (C language)
- Using tansformer to segment three-dimensional abdominal multiple organs -- actual battle of unetr
猜你喜欢

P2788 math 1 - addition and subtraction

高级软考(网络规划设计师)该如何备考?
MPX plug-in

What are the test preparation materials and methods for soft exam information processing technicians?
Mendeley -- a free document management tool that automatically inserts references into papers

软考一般什么时候出成绩呢?在线蹬?
Mpx 插件
软考信息处理技术员有哪些备考资料与方法?
Ping tool ICMP message learning
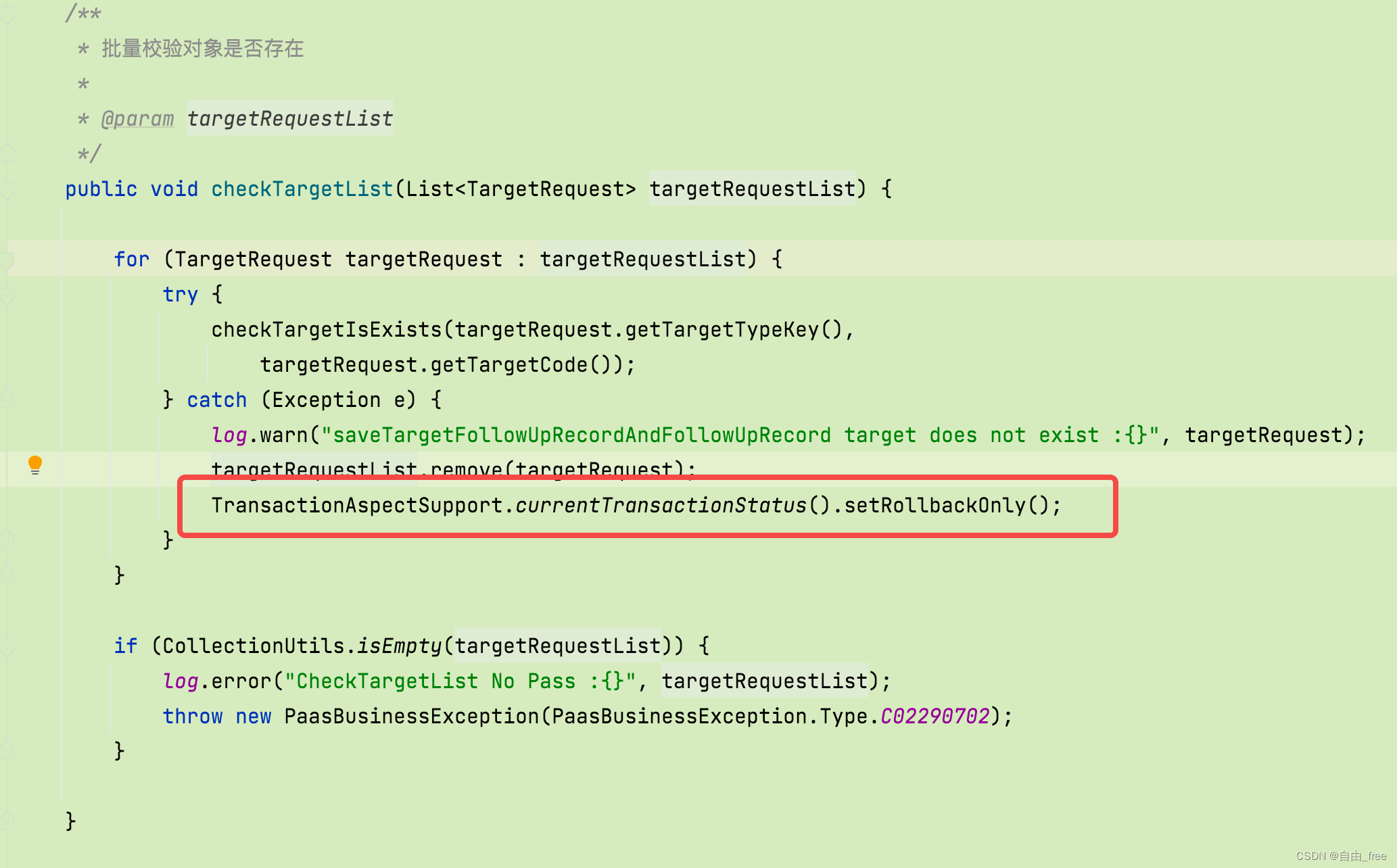
Transaction rolled back because it has been marked as rollback only
随机推荐
VR development optimization
MPX plug-in
【pyqt】tableWidget里的cellWidget使用信号与槽机制
TypeScript 接口继承
SQL Server 知识汇集11 : 约束
Wallhaven wallpaper desktop version
[recommendation system 02] deepfm, youtubednn, DSSM, MMOE
Typescript interface inheritance
滚动踩坑--UNI_APP(八)
Is the soft test intermediate useful??
uniapp 在onLaunch中跳转页面后,点击事件失效解决方法
China Southern Airlines pa3.1
【OneNote】无法连接到网络,无法同步问题
Still cannot find RPC dispatcher table failed to connect in virtual KD
SQL Server knowledge gathering 9: modifying data
[STM32] actual combat 3.1 - drive 42 stepper motors with STM32 and tb6600 drivers (I)
打算参加安全方面工作,信息安全工程师怎么样,软考考试需要怎么准备?
July 10, 2022 "five heart public welfare" activity notice + registration entry (two-dimensional code)
Installation and configuration of slurm resource management and job scheduling system
单调性约束与反单调性约束的区别 monotonicity and anti-monotonicity constraint