当前位置:网站首页>Single chip microcomputer principle and Interface Technology (esp8266/esp32) machine human draft
Single chip microcomputer principle and Interface Technology (esp8266/esp32) machine human draft
2022-07-05 09:51:00 【zhangrelay】
The following is the draft , Many fallacies , For reference only , The final draft is pending .

Robot man
Single chip microcomputer ( Robot direction ) Principle and Interface Technology
Single-chip microcomputer principle and interface technology
Course number | credits | 3 | The first semester | 5 | |||||||||
Class hours | lecture :40 Class hours experiment :8 Class hours practice :0 Class hours | ||||||||||||
Course type | Professional compulsory courses | Course nature | Compulsory | Assessment form | The test | ||||||||
Prerequisite courses | 《 Fundamentals of controller programming 》、《 circuit 》、《 Analog Electronics 》、《 Digital circuits and FPGA Design 》 | ||||||||||||
It's suitable for majors | Robot engineering | Opening College | |||||||||||
Suggested textbook | |||||||||||||
Main reference books | |||||||||||||
Maker | Approved by | Approved by | |||||||||||
Revision period | edition | ||||||||||||
One 、 Course description
《 Single chip microcomputer ( Robot direction ) Principle and Interface Technology 》 This course is a professional compulsory course for robotics engineering major , In the fifth semester . Through the study of this course , Students are interested in SCM ( Robot direction ) Have a certain understanding of the programming and application of microcontrollers , It can improve the performance based on MCU ( Robot direction ) The hardware of Technology 、 The ability of software development and design , Improve the ability to analyze and solve problems , For the follow-up study of advanced MCU ( Robot direction ) Lay the foundation , Also for the future engaged in automated test system design 、 The design of intelligent instruments lays a solid foundation . This course focuses on methodology , Not only explain the basic knowledge points and basic principles , Pay more attention to guiding students to learn by analogy , The lines , At the same time, it emphasizes the formation of programming ideas , such as “ Building blocks ” Design ideas 、 The idea of finite state machine programming .
Two 、 Course objectives
1. Be able to fully understand the importance of system hardware and software integration in system design , It can analyze and compare all parts of the robot control system , Determine the software and hardware integration scheme of each part of the system .( Corresponding to graduation requirements 1.2: Understand the concept of system integration , Be able to determine the boundary of the system , Identify the various components of the system , Including industrial robots 、 Robot peripherals 、 Machine vision unit 、 Fixture and other mechanical parts 、 Electrical control 、 sensor 、 Industrial control network and communication , Be able to compare, analyze and determine the integration scheme of each part .)
2. Can be based on SCM ( Robot direction ) Robot control system , Using SCM ( Robot direction ) Principle and relevant professional knowledge , Decompose it into signal acquisition 、 control 、 Communication and other sub modules , It can work on the working principle of each module .( Corresponding to graduation requirements 2.2: Be able to apply scientific principles and mathematical models , Decompose complex systems , Realize modular expression , And the structure of the units and components of the advanced production line system dominated by industrial robots 、 Principle analysis .)
3. For control system requirements , Analysis unit circuit , Calculate the parameters of components in the unit circuit , Use the analysis results to design the unit circuit , Complete the corresponding functional software design .( Corresponding to graduation requirements 3.3: Can be tailored to specific needs , Select components and parts through modeling and simulation tools 、 Process requirement analysis and function analysis , Complete the hardware circuit and software module design of the unit or subsystem .)
3、 ... and 、 Teaching content and basic requirements
( One ) Striding forward to SCM ( Robot direction ) Gate
1. The teaching content of the course
(1) Single chip microcomputer ( Robot direction ) summary ;
(2)ESP Series MCU ( Robot direction ) and ESP8266/ESP32 Programming based .
2. Key points of the course 、 difficulty
a key :ESP8266/ESP32 Basic knowledge of 、 The core content of the course ;
difficulty :ESP8266/ESP32 Header files commonly used in 、 Storage type of variable 、 Single chip microcomputer ( Robot direction ) Pin function of .
3. Course teaching requirements
Understand the nature of this course 、 Research object and method 、 Mission . Master the basic usage of the tool software used in the course , master ESP8266/ESP32 Variable type , Familiar with MCU ( Robot direction ) The function of the pin .
4. Course teaching methods
Research on integrated thinking 、 Inquiry learning .
( Two )ESP Series MCU ( Robot direction )I/O Simple application
1. The teaching content of the course
(1) Single chip microcomputer ( Robot direction ) Minimum application system ;
(2) Production of flashing lights ;
(3) Production of advertising lights .
2. Key points of the course 、 difficulty
a key : Single chip microcomputer ( Robot direction ) Minimum system 、ESP8266/ESP32 The basic method of programming and the right I/O How to operate the mouth ;
difficulty : Hardware schematic diagram reading 、 Ideas and methods of program design 、 Yes I/O Basic operation of mouth .
3. Course teaching requirements
It is easy to write according to hardware I/O Mouth operation procedure , Master different programming methods , Be flexible to I/O The operation of the mouth , master ESP8266/ESP32 The basic structure of the program .
4. Course teaching methods
Inquiry learning 、 Problem based Teaching .
( 3、 ... and ) Basic skill —ESP Series Series MCU ( Robot direction ) Hardware
1. The teaching content of the course
(1)ESP Series MCU ( Robot direction ) The overall structure ;
(2)ESP Series MCU ( Robot direction ) Of CPU;
(3)ESP Series MCU ( Robot direction ) The memory of ;
(4) Single chip microcomputer ( Robot direction ) Parallel input / Output port .
2. Key points of the course 、 difficulty
a key : Single chip microcomputer ( Robot direction ) Structure 、 Single chip microcomputer ( Robot direction ) The clock signal of 、 Single chip microcomputer ( Robot direction ) Memory organization 、 Single chip microcomputer ( Robot direction ) Of I/O mouth ;
difficulty : special function register 、I/O The structure of the mouth 、 Working principle and load capacity .
3. Course teaching requirements
Familiar with MCU ( Robot direction ) Structure and clock signal , Deep understanding of SCM ( Robot direction ) Memory and I/O Working principle and operation method of mouth .
4. Course teaching methods
Research on integrated thinking 、 Inquiry learning .
( Four ) Basic skill —ESP8266/ESP32 Programming based
1. The teaching content of the course
(1)ESP8266/ESP32 Language data ;
(2)ESP8266/ESP32 Language to single chip ( Robot direction ) Control of major resources ;
(3)ESP8266/ESP32 Basic operations and flow control statements of language ;
(4)ESP8266/ESP32 Language arrays and functions ;
(5)ESP8266/ESP32 Language preprocessing commands and Assembly statement embedding ;
(6) Single chip microcomputer ( Robot direction )ESP8266/ESP32 Programming specification .
2. Key points of the course 、 difficulty
a key :ESP8266/ESP32 Data storage type 、ESP8266/ESP32 Single chip microcomputer to ( Robot direction ) Control of resources 、 The difference between function and interrupt function 、ESP8266/ESP32 Preprocessing command for 、ESP8266/ESP32 Programming specification ;
difficulty : Data storage type and ESP Series MCU ( Robot direction ) Storage relationships 、 Operation method of special function register .
3. Course teaching requirements
Have a good command of ESP8266/ESP32 Storage type of C Language expression , Operation method of special function register ; master ESP8266/ESP32 Programming specification ; Have a good command of C Basic operation and process control method of language programming .
4. Course teaching methods
Research on integrated thinking 、 Inquiry learning .
( 5、 ... and )ESP Series MCU ( Robot direction ) Interrupt the system
1. The teaching content of the course
(1) Interrupt system structure and interrupt control ;
(2) Interrupt priority and interrupt function ;
(3) External interrupt source ESP8266/ESP32 Programming .
2. Key points of the course 、 difficulty
a key : Interrupt generation and interrupt priority 、 External interrupt programming ;
difficulty : Configuration method of interrupt related registers , Generation and clearing of interrupt flag bit .
3. Course teaching requirements
Master the configuration method of interrupt control register , Master the initialization and programming methods of external interrupts including priority .
4. Course teaching methods
Inquiry learning 、 Problem based Teaching .
( 6、 ... and ) Timer and nixie tube display
1. The teaching content of the course
(1)ESP Series MCU ( Robot direction ) Timer for / Basic knowledge of counters ;
(2) Timer / How the counter works ;
(3) Timer / Application of counter ;
(4) The display principle and Realization of digital tube .
2. Key points of the course 、 difficulty
a key : Timing counter mode 1 and 2 Working process of 、 Configuration method of related registers 、 Timing counter programming 、 Digital tube dynamic display ;
difficulty : Timing counter working mode selection 、 Initial value calculation and register configuration 、 Principle and programming of dynamic display .
3. Course teaching requirements
Master the characteristics and programming methods of each working mode of the timing counter , Master the programming method of dynamic display .
4. Course teaching methods
Inquiry learning 、 Problem based Teaching .
( 7、 ... and ) Keyboard and LCD Show
1. The teaching content of the course
(1) Principle and implementation of vertical keyboard detection ;
(2) Matrix keyboard detection principle and implementation ;
(3)LCD1602 Display principle and implementation .
2. Key points of the course 、 difficulty
a key : Key detection principle 、 Keyboard anti shake 、LCD1602 And MCU ( Robot direction ) Interface circuit design and programming method ;
difficulty : Programming method of using timer to eliminate software jitter 、LCD1602 Timing and read / write operations .
3. Course teaching requirements
Proficient in keyboard programming and software shake elimination methods , Have a good command of LCD1602 Programming method of , According to the functional requirements , The program can be transplanted flexibly .
4. Course teaching methods
Inquiry learning 、 Problem based Teaching .
( 8、 ... and )UART Serial port communication
1. The teaching content of the course
(1) Preliminary understanding of serial communication ;
(2)ESP Series MCU ( Robot direction )UART Module introduction ;
(3) Application of serial port .
2. Key points of the course 、 difficulty
a key : The working modes of serial communication and the configuration of related registers 、 Programming method of serial communication ;
difficulty : Working mode of serial communication 、 The process and programming of serial communication .
3. Course teaching requirements
Master the initialization of serial communication and the programming method under various working modes .
4. Course teaching methods
Inquiry learning 、 Problem based Teaching .
( Nine )I2C Bus interface design
1. The teaching content of the course
(1)I2C Bus Overview ;
(2) Single chip microcomputer ( Robot direction ) And EEPROM Programming example .
2. Key points of the course 、 difficulty
a key :I2C Bus communication protocol 、 Timing and read / write operations ,EEPROM And MCU ( Robot direction ) Interface circuit design, timing and read-write operation ;
difficulty :I2C Initialization and read / write operations of , Yes EEPROM Read and write operations .
3. Course teaching requirements
skilled I2C and EEPROM Programming method of , According to the functional requirements , The program can be transplanted flexibly .
4. Course teaching methods
Inquiry learning 、 Problem based Teaching .
( Ten ) A / D and D / a conversion
1. The teaching content of the course
(1)A/D and D/A Interface Overview ;
(2)PCF8591 The hardware interface of ;
(3)PCF8591A/D Transformation principle and practice ;
(4)PCF8591 chip D/A Transformation principle and practice .
2. Key points of the course 、 difficulty
a key :PCF8591 The interface circuit 、 Timing conversion process ,PCF8591 Programming methods ;
difficulty :PCF8591 Initialization and programming method of .
3. Course teaching requirements
skilled I2C and EEPROM The programming method of , According to the functional requirements , The program can be transplanted flexibly .
4. Course teaching methods
Inquiry learning 、 Problem based Teaching .
( Ten ) Integrated design
1. The teaching content of the course
(1) Analysis of system performance and requirements ;
(2) Overall scheme design ;
(3) Unit circuit hardware design ;
(4) software design ;
(5) Commissioning and operation .
2. Key points of the course 、 difficulty
a key : Hardware principle analysis of unit circuit 、 Unit module software design ;
difficulty : Systematic design thinking , System distributed debugging .
3. Course teaching requirements
According to the system functional requirements , Choose a reasonable design , Complete hardware and software circuit design and system debugging .
4. Course teaching methods
Research on integrated thinking 、 Inquiry learning 、 Blended learning 、 Problem based Teaching .
Four 、 Course hour allocation
《 Single chip microcomputer ( Robot direction ) Principle and Interface Technology 》 According to the class hours specified in the teaching plan , Theory Course 40 Class hours , experiment 8 Class hours , The specific class hour allocation is shown in the table below .
Course hour allocation table
Summary of teaching content | Class hours | Teaching methods | Corresponding to the course objectives | ||
lecture | experiment | practice | |||
1. Striding forward to SCM ( Robot direction ) Gate | 3 | Research on integrated thinking 、 Inquiry learning | 2 | ||
2.ESP Series MCU ( Robot direction )I/O Simple application | 3 | Inquiry learning 、 Problem based Teaching | 2、3 | ||
3. Basic skill —ESP Series Series MCU ( Robot direction ) Hardware | 3 | Research on integrated thinking 、 Inquiry learning | 2、3 | ||
4. Basic skill —ESP8266/ESP32 Programming based
| 2 | Research on integrated thinking 、 Inquiry learning | 2/3 | ||
5.ESP Series MCU ( Robot direction ) Interrupt the system
| 4 | Inquiry learning 、 Problem based Teaching | 2、3 | ||
experiment 1: External interrupt experiment | 2 | Practice | 1、2、3 | ||
6. Timer and nixie tube display
| 4 | Inquiry learning 、 Project driven Teaching | 2、3 | ||
6. Timer and nixie tube display
| 3 | Inquiry learning 、 Problem based Teaching | 2、3 | ||
experiment :2: Timer / Counter experiment | 2 | Practice | 1、2、3 | ||
7. Keyboard and LCD Show
| 4 | Inquiry learning 、 Problem based Teaching | 2、3 | ||
7. Keyboard and LCD Show
| 2 | Inquiry learning 、 Problem based Teaching | 2、3 | ||
experiment 3: Keyboard and LCD experiment | 2 | Practice | 1、2、3 | ||
8.UART Serial port communication
| 4 | Inquiry learning 、 Problem based Teaching | 1、2、3 | ||
experiment :4: Serial port communication experiment | 2 | Practice | 1、2、3 | ||
9.I2C Bus interface design
| 4 | Inquiry learning 、 Problem based Teaching | 1、2、3 | ||
10. A / D and D / a conversion
| 4 | Inquiry learning 、 Problem based Teaching | 1、2、3 | ||
close meter | 40 | 8 | |||
5、 ... and 、 Other teaching links
1. Experiment items and contents
List of experimental items and contents
Serial number | Name of experiment project | Summary | Experimental hours | The number of people in each group | The type of experiment | Experimental categories | The experimental requirements |
1 | Experiment 1 、 External interrupt experiment | Programming to realize : When KEY0 Press down , External interrupt 0 Request interrupt , Control the led to light up circularly from top to bottom 3 circle ; When KEY1 Press down , External interrupt 1 Request interrupt , Control LED flashing 3 Time .( Request external interrupt 1 Priority over external interrupts 0, namely KEY1 Pressing it can interrupt the action of the running water lamp , External interruption 1 After processing , Resume external interrupt 0 To deal with , And can be interrupted from the last time LED Start the cycle ). | 2 | 1 | Basic | Professional basis | Must do |
2 | Experiment two 、 Timer / Counter experiment | Realization 19 Second countdown function , The last two digits of the initial state nixie tube display numbers “19”, Request timer 0 Every time 10ms Create an interrupt , Count in the timer interrupt service program , Count for one second , The nixie tube display decreases accordingly 1, At the end of the countdown , The nixie tube shows “00”, And in cycles 1 Seconds to flash | 2 | 1 | Basic | Professional basis | Must do |
3 | Experiment three 、 Keyboard and LCD experiment | Yes 4×4 The key value of the matrix keyboard circuit is encoded , Programming in LCD The of each key is displayed on the LCD ASCII code . | 2 | 1 | Design type | Professional basis | Must do |
4 | Experiment four 、 Serial port communication experiment | Implement the following functions : Serial port debugging assistant to MCU ( Robot direction ) Send control code , Single chip microcomputer ( Robot direction ) towards PC Loopback control code ,0: Extinguish ;1:LED Cycle from top to bottom ;2:LED Cycle from bottom to top ;3:LED flashing ;4: Buzzer ring | 2 | 1 | Design type | Professional basis | Must do |
2. explain
This course has strong practicality , Experimental project is a necessary part of course teaching . The purpose of this course experiment is to improve students' ability to analyze and solve simple problems , Cultivate the ability to seek truth from facts 、 Rigorous scientific style and good experiment habit , For engaging in SCM ( Robot direction ) The analysis and design of the control system lay the foundation . Through the experiment, the students' abilities are as follows :
(1) Be able to recognize the same experimental requirements , It can be realized by different schemes , Be able to search the literature , Seek alternative solutions .
(2) Through design experiments , It can be based on MCU ( Robot direction ) And adopt scientific methods 、 Professional theory analyzes the given experimental requirements , Using single chip microcomputer ( Robot direction ) Experimental scheme of micro robot design .
(3) Able to use Arduino、 Serial port debugging assistant and other tool software for software design and system debugging .
6、 ... and 、 Teaching management
1. In the first week of school , Put the MCU ( Robot direction ) Micro robots are distributed to students , Every time 2 One set of people , It is required to install the programming software by yourself 、 drive 、 Download software and debugging tools .
2. Students need to finish all their homework in the micro robot .
3. Before the experiment class , Students are required to have completed the basic part of the experiment on the micro robot . In the experimental class, teachers mainly complete the acceptance of students' experimental results and the arrangement of some tasks of experimental improvement , Teachers spend more time discussing problems with students in the experiment and guiding students to analyze and solve problems .
7、 ... and 、 Assessment method
1、 Assessment description
Course assessment adopts “N+1” Assessment method .“N” To learn grades , From usual homework 、 The mid-term examination and experiment consist of ,“1” For the final exam .
The students' grades in this course are changed from their usual grades 、 Experimental results 、 The results of the mid-term examination and the final examination are composed of four parts , Among them, the usual score accounts for the total score 20%, The experimental results account for% of the total results 30%、 The mid-term examination score accounts for% of the total score 10%, The final exam score accounts for% of the total score 40%. The usual grades are determined by the usual homework ( Of the total score 20%) evaluate . See the following table for specific assessment links and assessment proportion .
Assessment link | Usual results (20%) | Interim assessment (10%) | Experimental results (30%) | Final assessment (40%) | total |
Homework | |||||
Assessment proportion | 20% | 10% | 30% | 40% | 100% |
Usual homework scoring standard
Assessment content | optimal (90-100) | good (80-89) | in (70-79) | pass (60-69) | fail, (<60) |
Knowledge and concept mastery ( The weight 30%) | Master knowledge and concepts comprehensively , Use it properly | Have a comprehensive grasp of knowledge and concepts , Can correctly use | Have a comprehensive grasp of knowledge and concepts , Be able to use , But without considering constraints | The level of knowledge and concept mastery is average , It cannot be used correctly | Not mastering knowledge and concepts , Can't use formula |
The correctness of the problem-solving process 、 integrity (70%) | The problem solving process is correct 、 complete , Strong logic , The correct rate of the answer exceeds 90%, Write clearly | The problem-solving process is more correct 、 complete , More logical , The correct rate of the answer exceeds 80%, Write clearly | The problem-solving process is basically correct 、 complete , The correct rate of the answer exceeds 70% | There are errors in the process of solving problems , The correct rate of the answer exceeds 60% | The problem-solving process is wrong and incomplete , The correct rate of the answer is lower than 60% |
(1) Midterm exam questions 、 The final examination questions need the teacher to formulate the corresponding reference answers and scoring standards according to the actual teaching situation and file them as the assessment materials of this course .
(2) Experimental examination method : Follow the experimental operation (60%)、 Experimental report (40%), Calculate the score of each experimental project in the percentage system , The assessment criteria of individual experiment results are shown in the table below , The average of the scores of the four experimental items is taken as the experimental score of this course .
Evaluation criteria for individual experiment results
Assessment experiment operation scoring table | Experimental report Standard for evaluation | ||
Operation performance | Grade ( branch ) | Report content | score |
At a specified time 2/3 Complete the operation in time , Meet the experimental requirements ; The equipment is in place , The environment is clean . | A(90-100) | 1. The main content of the report is ( Full marks 80 branch ) | ① The experimental requirements are not fully met 40 branch ; Lack of schematic diagram or flow diagram 10 branch ② The chart is not standard , Or the handwriting is not clear , buckle 10 branch ; ③ The program structure is not concise , buckle 5 branch ; ④ Missing program manifest , Or lack of records of experimental results , Supplement after prompt , buckle 10 branch ; |
Finish within the time limit , Complete the operation under individual guidance at most once , The equipment is in place , The environment is clean . | B(80-89) | 2. Think and analyze ( Full marks 20 branch ) | ① Thoughtless analysis , buckle 20 branch ; ② The analysis of main contents is not in place , buckle 15 branch ; ③ The main content analysis is correct , But not comprehensive , buckle 10 branch ; ④ The handwriting is scrawled 5 branch ; |
Finish within the time limit , After several individual instructions, complete the operation , The equipment is in place , The environment is clean . | C(70-79) | The total score of the experiment report | ① The sum of the scores of the main content items of the report and the scores of the thinking and analysis items , Total scores for the experimental report ; ② No experimental data record , Or the experimental data is false , The total score of the experimental report is zero . |
Finish within the time limit , After several individual instructions, complete the operation , The arrangement of equipment and environment is not in place . | D(60-69) | ||
The operation is not completed within the specified time . | E(<60) | ||
2、 List of course objective assessment scheme
Assessment description :《 List of course objective assessment scheme 》 The corresponding relation of expression , It can prove that the students have passed the examination of this course , To meet the requirements of the course objectives .
List of course objective assessment scheme
Number of graduation requirements supported by the course | Course objective No | Assessment content | Assessment form | Check the raw materials ( explain : The examination paper 、 Homework 、 Experimental report 、 Technical report 、 Process record 、 Practice summary, etc , Paper or electronic ) |
1.2 | Course objectives 1 | Compare, analyze and determine the integration scheme of each part . | Homework 、 Experimental evaluation | Homework ( Paper quality ) Experimental report ( Paper quality ) |
2.2 | Course objectives 2 | Unit module structure and principle analysis . | midsemester 、 final exam | The examination paper ( Paper quality ) The examination paper ( Paper quality ) |
3.3 | Course objectives 3 | Unit circuit analysis 、 Hardware and software design | Homework 、 Experimental evaluation | Homework ( Paper quality ) Experimental report ( Paper quality ) |
边栏推荐
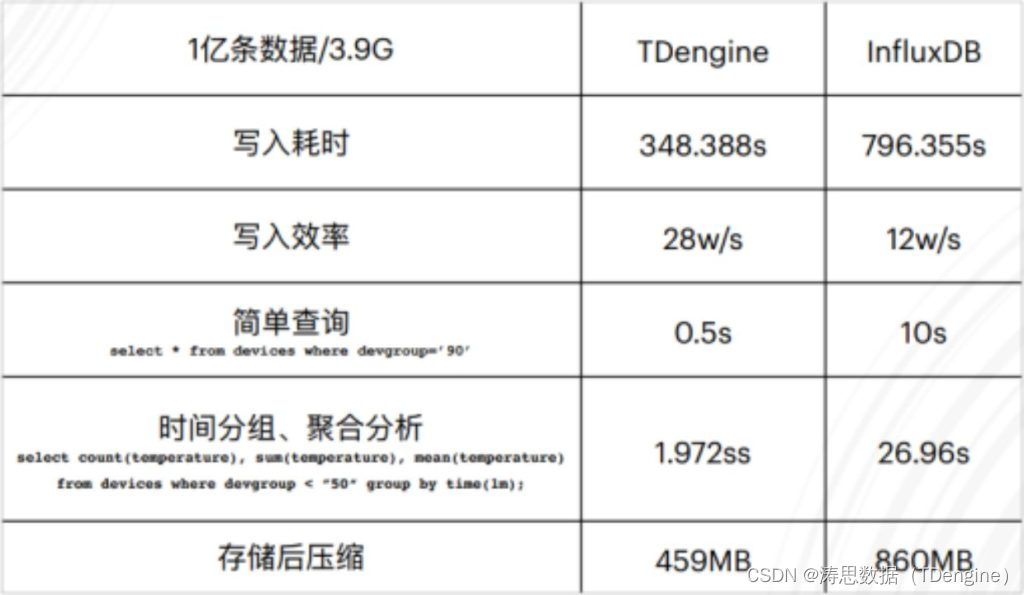
- Understand the window query function of tdengine in one article
- 代码语言的魅力
- The most comprehensive promotion strategy: online and offline promotion methods of E-commerce mall
- Principle and performance analysis of lepton lossless compression
- 解决Navicat激活、注册时候出现No All Pattern Found的问题
- TDengine 已经支持工业英特尔 边缘洞见软件包
- 90%的人都不懂的泛型,泛型的缺陷和应用场景
- How to implement complex SQL such as distributed database sub query and join?
- Android privacy sandbox developer preview 3: privacy, security and personalized experience
- What are the advantages of the live teaching system to improve learning quickly?
猜你喜欢

How to use sqlcipher tool to decrypt encrypted database under Windows system
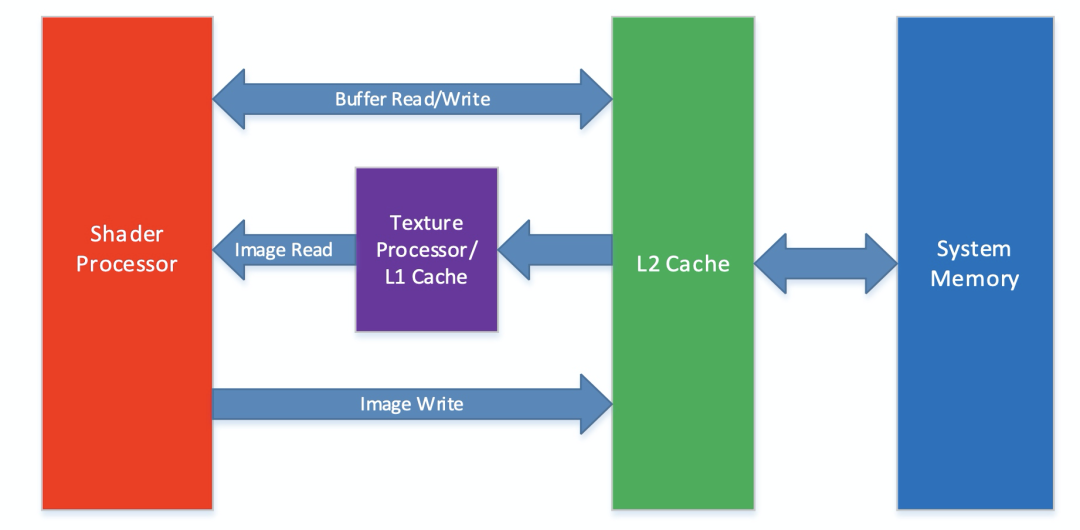
移动端异构运算技术-GPU OpenCL编程(进阶篇)
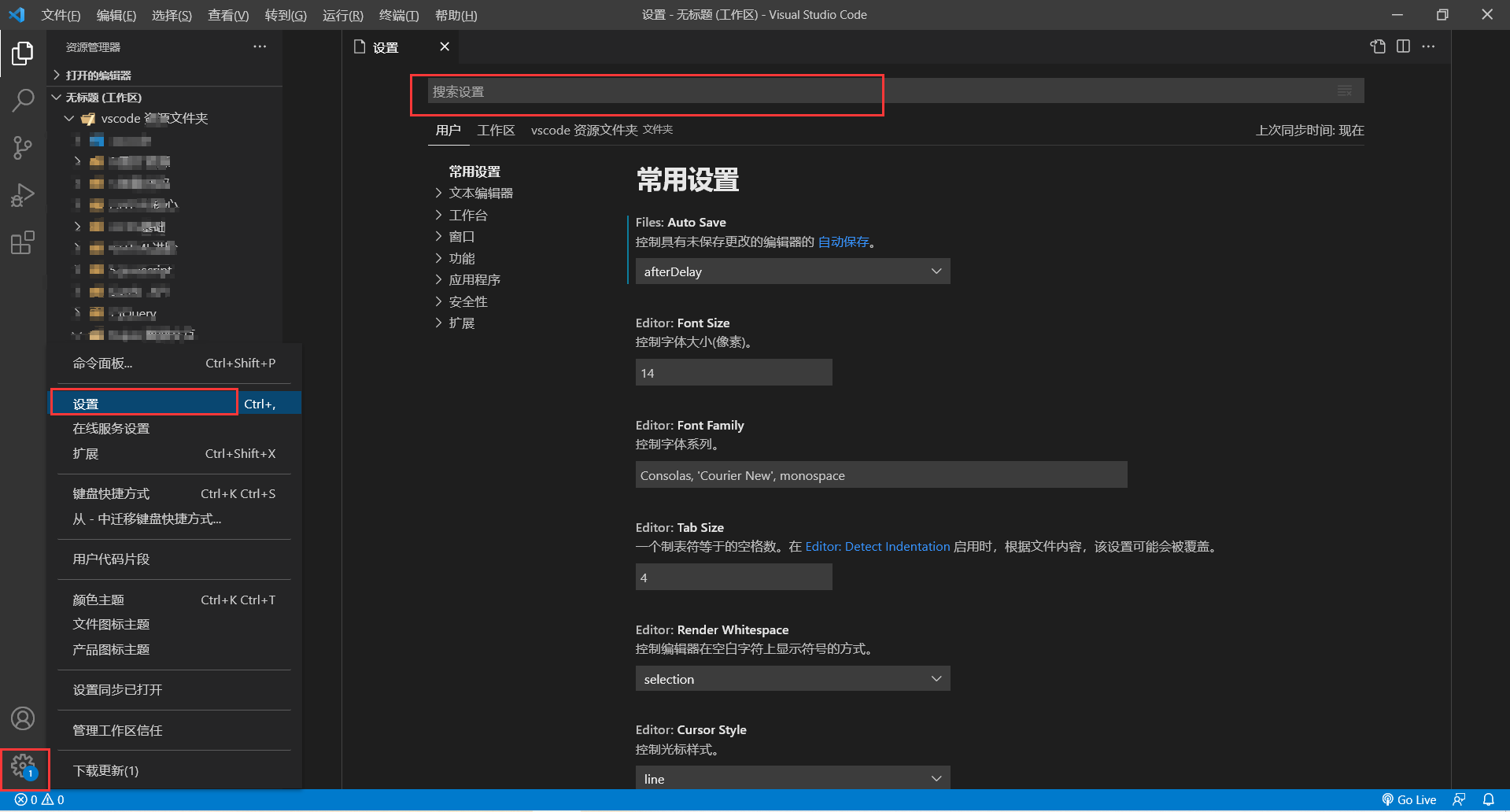
Vs code problem: the length of long lines can be configured through "editor.maxtokenizationlinelength"

让AI替企业做复杂决策真的靠谱吗?参与直播,斯坦福博士来分享他的选择|量子位·视点...
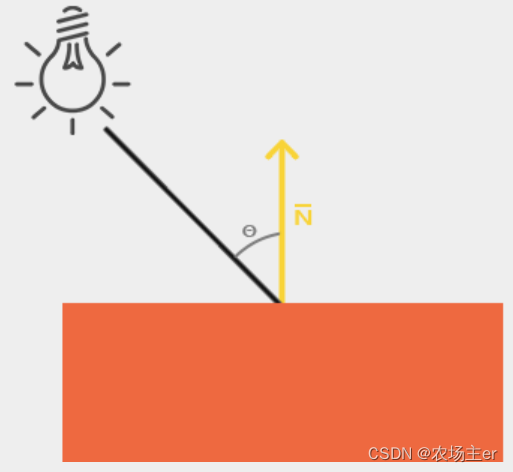
OpenGL - Lighting
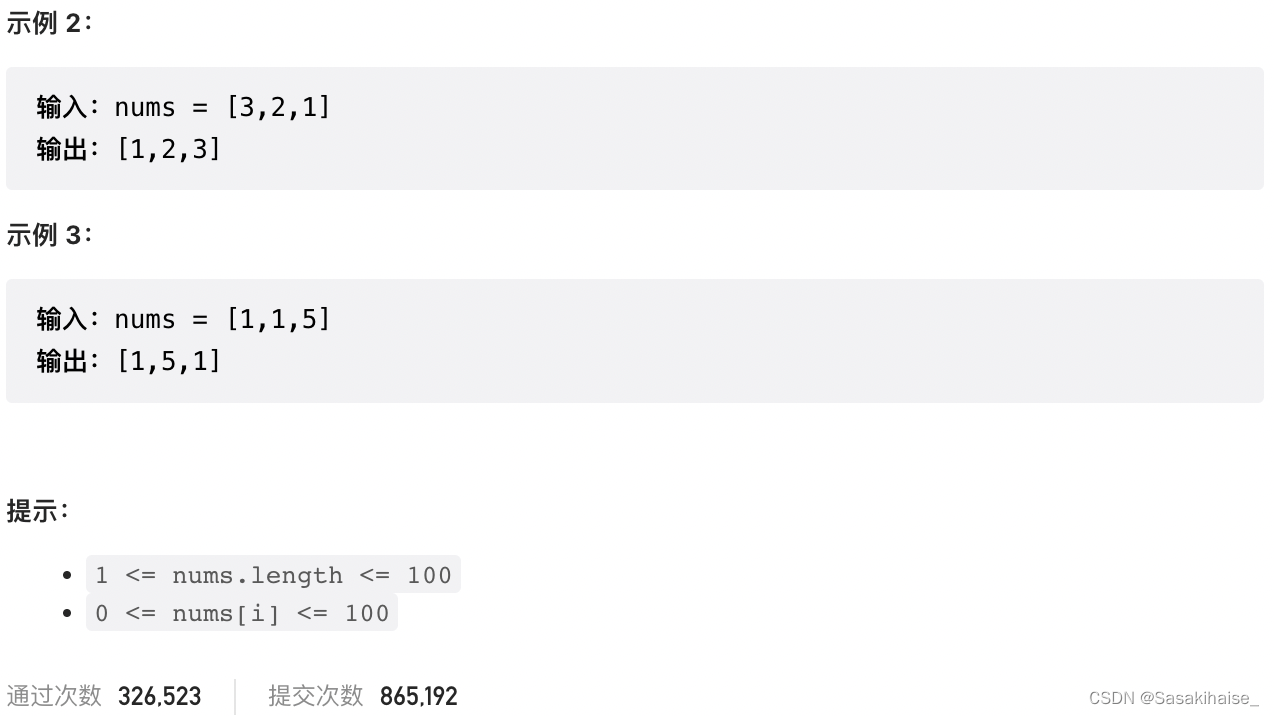
LeetCode 31. Next spread
Viewpager pageradapter notifydatasetchanged invalid problem

How Windows bat script automatically executes sqlcipher command
![[sourcetree configure SSH and use]](/img/9a/1cd4ca29e5b7a3016ed6d5dc1abbef.png)
[sourcetree configure SSH and use]
Observation cloud and tdengine have reached in-depth cooperation to optimize the cloud experience of enterprises
随机推荐
[sorting of object array]
Principle and performance analysis of lepton lossless compression
LeetCode 503. Next bigger Element II
E-commerce apps are becoming more and more popular. What are the advantages of being an app?
植物大战僵尸Scratch
The popularity of B2B2C continues to rise. What are the benefits of enterprises doing multi-user mall system?
[JS sort according to the attributes in the object array]
The most comprehensive promotion strategy: online and offline promotion methods of E-commerce mall
H. 265 introduction to coding principles
从“化学家”到开发者,从甲骨文到TDengine,我人生的两次重要抉择
Unity skframework framework (24), avatar controller third person control
[listening for an attribute in the array]
Three-level distribution is becoming more and more popular. How should businesses choose the appropriate three-level distribution system?
卷起來,突破35歲焦慮,動畫演示CPU記錄函數調用過程
Unity SKFramework框架(二十四)、Avatar Controller 第三人称控制
干货整理!ERP在制造业的发展趋势如何,看这一篇就够了
OpenGL - Lighting
【饿了么动态表格】
Optimize database queries using the cursor object of SQLite
Thermometer based on STM32 single chip microcomputer (with face detection)