当前位置:网站首页>Hard core, have you ever seen robots play "escape from the secret room"? (code attached)
Hard core, have you ever seen robots play "escape from the secret room"? (code attached)
2022-07-05 10:03:00 【Mr.Winter`】

Catalog
0 Preface
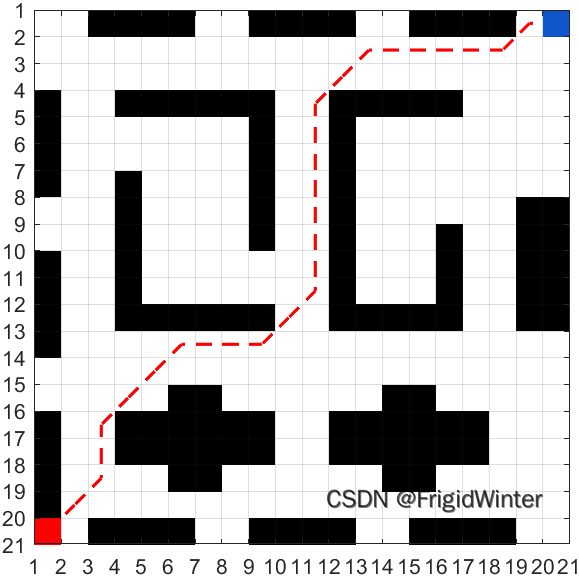
This paper makes an algorithm application based on Path Planning , That is, first construct two-dimensional Grid chamber , Release the entrance and exit of the secret room , Plan the escape route of the robot from the entrance to the exit , The dynamic diagram of simulation effect is as follows , After reading this article, I believe you can also do !
1 What is path planning ?
Modeling and positioning the environment through navigation technology 、 Control motion 、 Detect obstacles 、 Avoid obstacles , Mobile robots can complete many comprehensive tasks with the support of navigation technology , It has been widely used in entertainment 、 Medical care 、 mining 、 rescue 、 education 、 military 、 Space 、 Agriculture and other fields .
Path planning mainly solves the conflict free optimization problem of mobile robots from one position to another . According to whether the position and state of obstacles in the working environment change with time , Path planning technology can be roughly divided into
- Static path planning
- Dynamic path planning
in addition , According to the planning results of the path formed by the robot before or during the movement , Path planning technology can also be divided into
- Online planning
- Offline planning
Online path planning technology , Mobile robots acquire workspace information through local sensors attached to them , According to the changes of the working environment, the mobile robot can generate or update the optimal path in time . According to whether the target position of the robot has mobility , Path planning can be divided into
- Static target path planning
- Dynamic target road strength Planning
Various applications and job scenarios require different path planning algorithms .
2 Grid modeling : Construct a secret room
The main idea of grid method is to divide the region into non overlapping grids , Traverse from one grid to another with a connection graph , Traverse the grid without obstacles to complete the path planning from the initial position to the target position . The grid with obstacles is divided into two , The grid without obstacles is regressed into the algorithm . The initial position and target position are represented by grids , The planning result is represented by the path generated by grid connection .
This paper uses grid map to model the environment , The map generation function is as follows :
function map = generateMap(size, obstacle)
%%
% @breif: Generate grid map
% @prama[in]: size -> The size of the generated grid map
% @prama[in]: obstacle -> Static obstacles
% @retval: map -> grid map
%% Grid numerical meaning
% 1 ------ clearing
% 2 ------ Static obstacles
% 3 ------ Task point
% 4 ------ agent
%%
% Initialize the global grid map
map = ones(size(1), size(2));
% Initialize static obstacles
map(obstacle) = 2;
end
How to use this function ? Take a look at an example :
% Static obstacles
obs1 = 4:7;
obs2 = [41, 61, 81, 101];
obs3 = 368:372;
obs4 = [64,84, 104, 124, 144, 164, 165, 166, 167, 168, 169];
obs5 = [67, 68, 69, 70, 71, 72, 92, 112, 132, 152, 172];
obs6 = [76, 77, 96, 97, 115, 116, 117, 118, 135, 136, 137, 138, 156, 157, 176, 177];
obs7 = [224, 225, 226, 227, 228, 229, 230, 231, 232, 244, 264, 284, 304, 252, 272, 292, 312, 311, 310, 309];
obstacle = [obs1, obs1 + 6, obs1 + 12, obs2, obs2 + 120, obs2 + 240, obs2 + 19,...
obs2 + 139, obs2 + 259, obs3, obs3 + 20, obs4, obs5, obs6, obs6 + 160, obs7];
% Initialize map
map = generateMap([20, 20], obstacle);
% Print
plotMap(map);
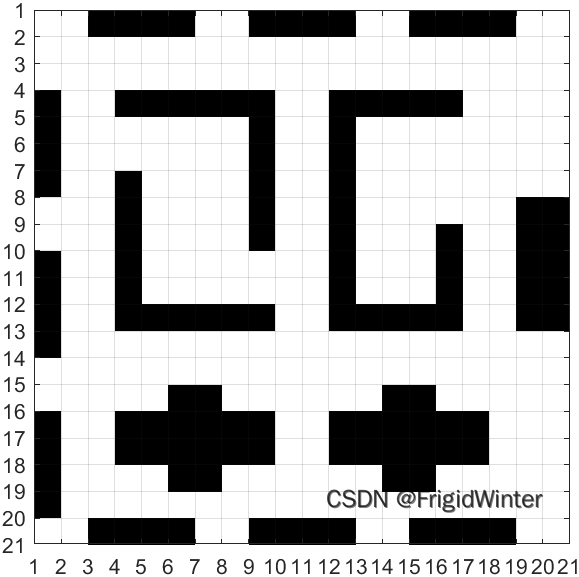
This is the effect of printing , You can do as you like 、 The actual application scenario , Use your imagination to design by yourself “ The chamber of secrets ”.
3 Release the first and last positions
Determine the head and end positions with grid coordinates .
start = [20, 1];
goal = [1, 20];
Use different colors to distinguish the first and last positions , And print it on the map .
function s = plotSquare(pts, size, G, color)
[ptsX, ptsY] = gridN2Xy(pts(:, 1) + size * (pts(:, 2) - 1), size, G);
ptsNum = length(ptsX);
for i=1:ptsNum
s = scatter(ptsX, ptsY, 270, 'Marker', 'square', 'MarkerEdgeColor', color, ...
"MarkerFaceColor", color);
end
end
4 Perform path planning
Here we use the simplest Greedy best first algorithm .
Greedy best first search is a heuristic search algorithm , It is an improvement of breadth first search algorithm ; The idea of the algorithm is Sort the nodes by the distance from the target , Then choose the node to be expanded at the cost of this distance .
- The breadth limited search algorithm is equivalent to a first in first out queue ;
- Limited depth search is equivalent to a last in first out stack ;
- Greedy best first search is equivalent to a priority queue sorted according to the distance from the destination .
Without obstacles , Greedy best first algorithm can usually find a shortest path and is more efficient than BFS higher , But in the case of obstacles , You may not find an optimal path .
The algorithm logic is as follows :
% Initialize parameters
open = [start, 0, h(start, goal), start]; % Open surface
close = []; % Closed surface
flag = false; % Planning end sign
next = [-1, 1, 14;... % Explore neighborhood
0, 1, 10;...
1, 1, 14;...
-1, 0, 10;...
1, 0, 10;...
-1, -1, 14;...
0, -1, 10;...
1, -1, 14];
neighborNum = length(next(:, 1));
while ~flag
% 【 Failure 】Open The table is empty and the target has not been found
if isempty(open(:,1))
return;
end
% 【 success 】 The target point appears in Open In the table
gIndex = locList(goal, open, [1:2]);
if gIndex
close = [open(gIndex, :); close];
cost = open(gIndex, 3);
flag = true;
break;
end
% Cost assessment
[val, index] = min(open(:, 4));
curNode = open(index, :);
close = [curNode; close]; % Minimum cost node in Closed surface
open(index, :) = []; % Minimum cost node out Open surface
% Evaluate the neighborhood expansion node of the current node
for i=1:neighborNum
% Initialize neighborhood nodes
neighborNode = [curNode(1) + next(i, 1), ...
curNode(2) + next(i, 2), ...
curNode(3) + next(i, 3), ...
0, curNode(1), curNode(2)
];
neighborNode(4) = h(neighborNode(1:2), goal);
% Obstacle judgment
if map(neighborNode(1), neighborNode(2)) == 2
continue;
end
% to update Open surface
open = updateOpen(neighborNode, open, close);
end
end
% Back to the path
path = backPath(close, start);
end
5 Demonstration test
In the secret room we built , Choose different entrances and exits , Test whether the robot can plan the legal path to escape from the secret room , Here is an additional test case, as shown in the following figure
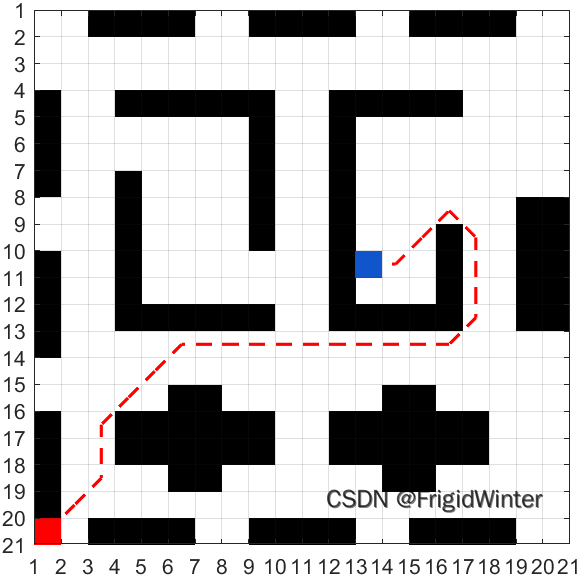
Good effect ~
More wonderful Columns :
- 《 Robot principle and technology 》
- 《ROS From entry to mastery 》
- 《 Computer vision course 》
- 《 machine learning 》
- 《 Numerical optimization method 》
- …
Private messages enter AI Technology exchange group , Whoring for nothing 30G E-books and teaching resources , Regularly release AI Knowledge dry goods 、 Free technology books and other benefits !
边栏推荐
- [NTIRE 2022]Residual Local Feature Network for Efficient Super-Resolution
- QT event filter simple case
- Those who are good at using soldiers, hide in the invisible, and explain the best promotional value works in depth in 90 minutes
- 百度智能小程序巡检调度方案演进之路
- What should we pay attention to when developing B2C websites?
- 盗版DALL·E成梗图之王?日产5万张图像,挤爆抱抱脸服务器,OpenAI勒令改名
- 揭秘百度智能测试在测试自动执行领域实践
- SQL learning group by multi table grouping scenario
- How to choose the right chain management software?
- [NTIRE 2022]Residual Local Feature Network for Efficient Super-Resolution
猜你喜欢
Kotlin Compose 与原生 嵌套使用

Community group buying has triggered heated discussion. How does this model work?
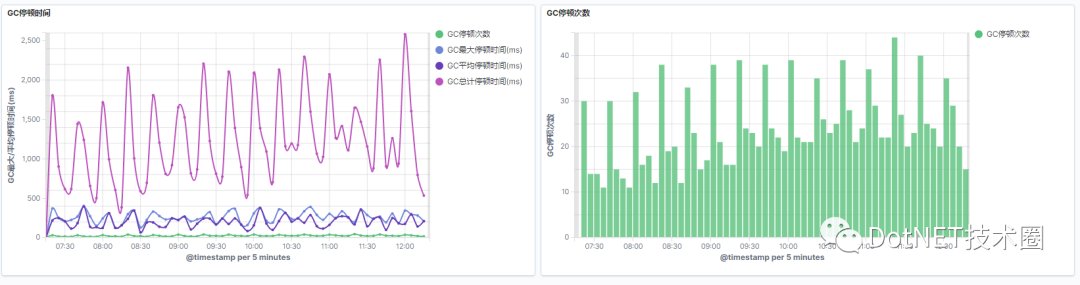
如何获取GC(垃圾回收器)的STW(暂停)时间?

How to use sqlcipher tool to decrypt encrypted database under Windows system
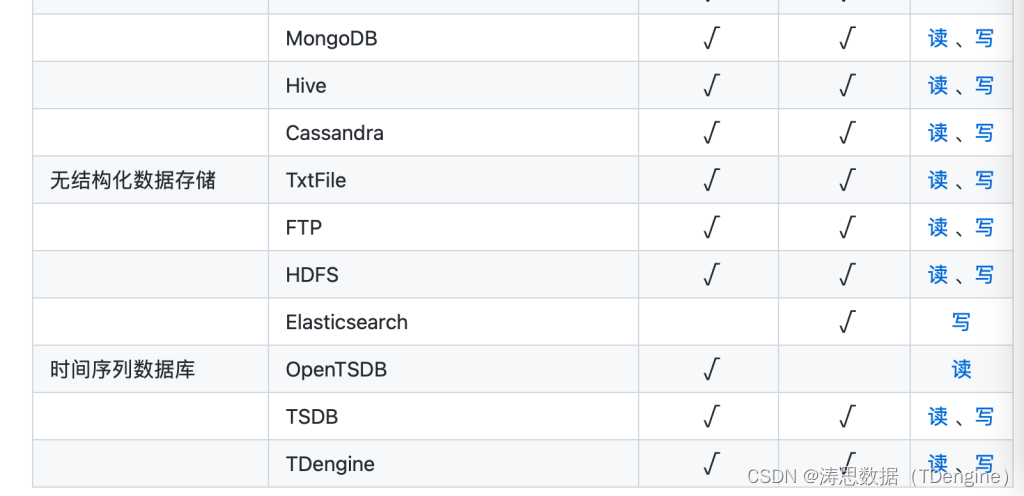
TDengine可通过数据同步工具 DataX读写

How to choose the right chain management software?
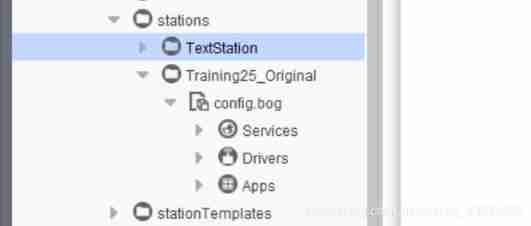
(1) Complete the new construction of station in Niagara vykon N4 supervisor 4.8 software
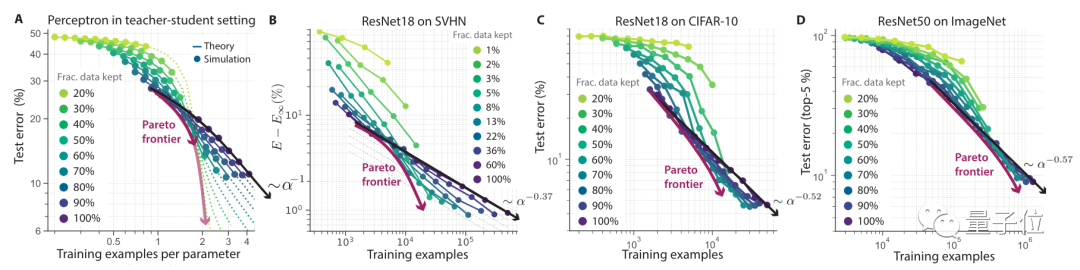
Cut off 20% of Imagenet data volume, and the performance of the model will not decline! Meta Stanford et al. Proposed a new method, using knowledge distillation to slim down the data set
Mysql80 service does not start
What about wechat mall? 5 tips to clear your mind
随机推荐
Online chain offline integrated chain store e-commerce solution
Principle and performance analysis of lepton lossless compression
How to improve the operation efficiency of intra city distribution
Kotlin compose multiple item scrolling
Application of data modeling based on wide table
正式上架!TDengine 插件入驻 Grafana 官网
Why does everyone want to do e-commerce? How much do you know about the advantages of online shopping malls?
uni-app---uni. Navigateto jump parameter use
How to empty uploaded attachments with components encapsulated by El upload
MySQL数字类型学习笔记
cent7安装Oracle数据库报错
Are databases more popular as they get older?
SQL learning alter add new field
Community group buying exploded overnight. How should this new model of e-commerce operate?
First understanding of structure
Why do offline stores need cashier software?
TDengine可通过数据同步工具 DataX读写
卷起来,突破35岁焦虑,动画演示CPU记录函数调用过程
About getfragmentmanager () and getchildfragmentmanager ()
Roll up, break 35 - year - old Anxiety, animation Demonstration CPU recording Function call Process