当前位置:网站首页>Gazebo的安装&与ROS的连接
Gazebo的安装&与ROS的连接
2022-07-06 17:30:00 【Serinus】
一、安装
1.添加源
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'

2.添加key
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
3.安装Gazebo
sudo apt-get update
sudo apt-get install gazebo9
sudo apt-get install libgazebo9-dev
出现以下错误,则重新输入命令sudo apt-get install gazebo9,直至下载成功(可能会多次出错)。
4.打开Gazebo
#输入命令
gazebo
出现以下界面则安装成功。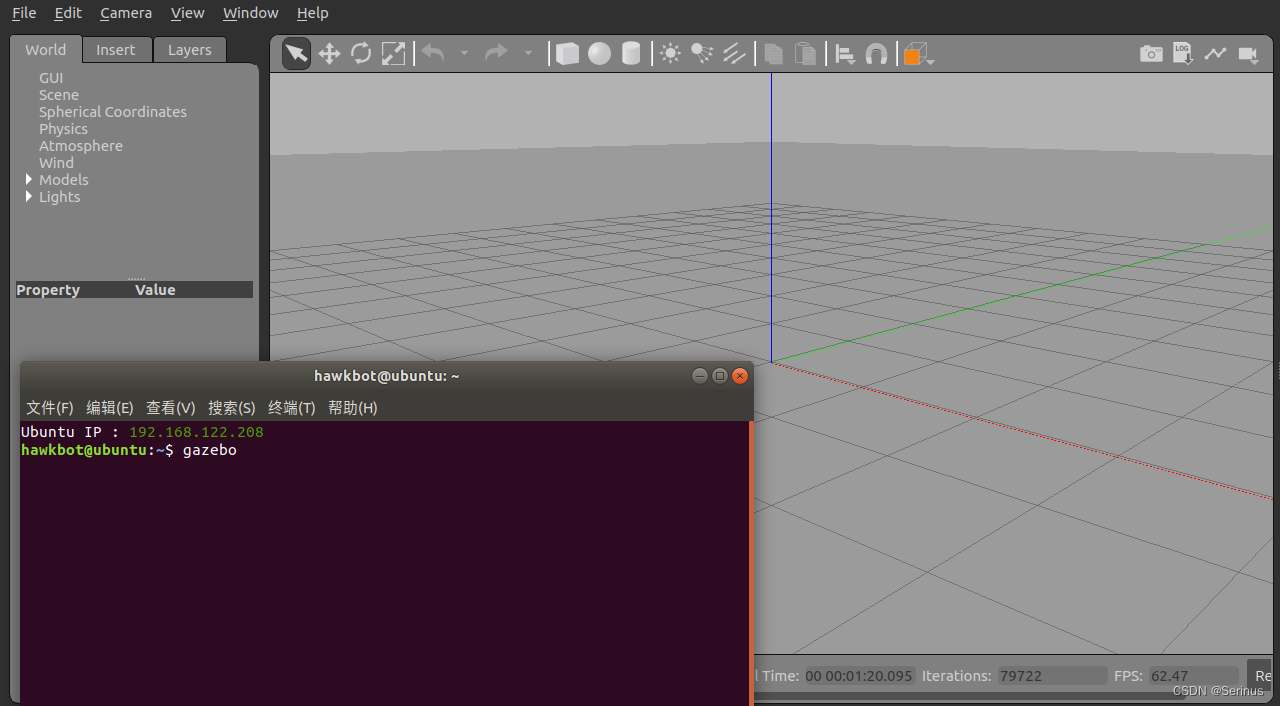
若报错:
VMware: vmw_ioctl_command error 无效的参数.
输入以下命令:
echo "export SVGA_VGPU10=0" >> ~/.bashrc
然后重启虚拟机。
二、与ROS连接
1.安装ROS-Gazebo接口
sudo apt install ros-melodic-gazebo-ros-pkgs ros-melodic-gazebo-msgs ros-melodic-gazebo-plugins ros-melodic-gazebo-ros-control
2.终端输入命令
roscore
#新开一个终端
rosrun gazebo_ros gazebo
出现以下界面则说明与ROS连接成功。
反之,则输入以下命令:
cd ~/.gazebo/
mkdir -p models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvf
killall gzserver
killall gzclient
之后再输入:
roscore
#新开一个终端
rosrun gazebo_ros gazebo
出现Gazebo打开界面则连接成功。
边栏推荐
- Anfulai embedded weekly report no. 272: 2022.06.27--2022.07.03
- Case development of landlord fighting game
- Asset security issues or constraints on the development of the encryption industry, risk control + compliance has become the key to breaking the platform
- windows安装mysql8(5分钟)
- How to evaluate load balancing performance parameters?
- 让我们,从头到尾,通透网络I/O模型
- Openjudge noi 1.7 10: simple password
- Periodic flash screen failure of Dell notebook
- golang中的atomic,以及CAS操作
- Mongodb client operation (mongorepository)
猜你喜欢
Boot - Prometheus push gateway use
Make a simple graphical interface with Tkinter

Telerik UI 2022 R2 SP1 Retail-Not Crack

Dell笔记本周期性闪屏故障

JTAG debugging experience of arm bare board debugging
ARM裸板调试之JTAG调试体验
Provincial and urban level three coordinate boundary data CSV to JSON

"Exquisite store manager" youth entrepreneurship incubation camp - the first phase of Shunde market has been successfully completed!

阿里云中mysql数据库被攻击了,最终数据找回来了
Do you understand this patch of the interface control devaxpress WinForms skin editor?
随机推荐
mysql: error while loading shared libraries: libtinfo. so. 5: cannot open shared object file: No such
Anfulai embedded weekly report no. 272: 2022.06.27--2022.07.03
阿里云中mysql数据库被攻击了,最终数据找回来了
动态规划思想《从入门到放弃》
Can the system hibernation file be deleted? How to delete the system hibernation file
Periodic flash screen failure of Dell notebook
Tencent cloud webshell experience
【案例分享】网络环路检测基本功能配置
[HFCTF2020]BabyUpload session解析引擎
A brief history of deep learning (II)
Tensorflow GPU installation
NEON优化:log10函数的优化案例
系统休眠文件可以删除吗 系统休眠文件怎么删除
The MySQL database in Alibaba cloud was attacked, and finally the data was found
【JVM调优实战100例】04——方法区调优实战(上)
资产安全问题或制约加密行业发展 风控+合规成为平台破局关键
Taro中添加小程序 “lazyCodeLoading“: “requiredComponents“,
Oracle:CDB限制PDB资源实战
Boot - Prometheus push gateway use
第七篇,STM32串口通信编程