当前位置:网站首页>目标检测系列——Faster R-CNN原理详解
目标检测系列——Faster R-CNN原理详解
2022-07-05 07:10:00 【秃头小苏】
作者简介:秃头小苏,致力于用最通俗的语言描述问题
往期回顾:目标检测系列——开山之作RCNN原理详解 目标检测系列——Fast R-CNN原理详解
近期目标:拥有10000粉丝
支持小苏:点赞、收藏、留言
目标检测系列——Faster R-CNN原理详解
写在前面
前文我已经介绍过R-CNN、Fast R-CNN的原理,具体内容可以点击下面链接阅读。【注:阅读此篇之前建议对R-CNN和Fast R-CNN有一定的了解】
Faster R-CNN算是这个目标检测系列的最后一篇了,在速度和准确率上也相对达到了比较好的效果,所以还是非常重要的。后面可能会更新语义分割Mask RCNN,当然这都是后话啦。现在就和我一起来学学Faster R-CNN吧。
Faster R-CNN整体流程
不知大家是否还记得Fast R-CNN的流程?这里帮大家回忆一下,其步骤如下:
- 候选区域生成
- 完整图像输入网络,候选框投影到特征图得到特征矩阵
- 特征矩阵经ROI pooling层缩放至统一大小,后将特征图展平得到预测结果
那么Faster R-CNN相较于Fast R-CNN有什么要的改进呢?其实最主要的就是在Fast R-CNN中我们依旧是和R-CNN一样采用SS算法来生成候选框,而在Faster R-CNN中我们采用的是一种称为RPN(Region Proposal Network)的网络结构来生成候选框。其它部分基本和Fast R-CNN一致,所以我们可以将Faster R-CNN的网络看成两部分,一部分是RPN获取候选框网络结构,另一部分是Fast R-CNN网络结构,如下图所示:
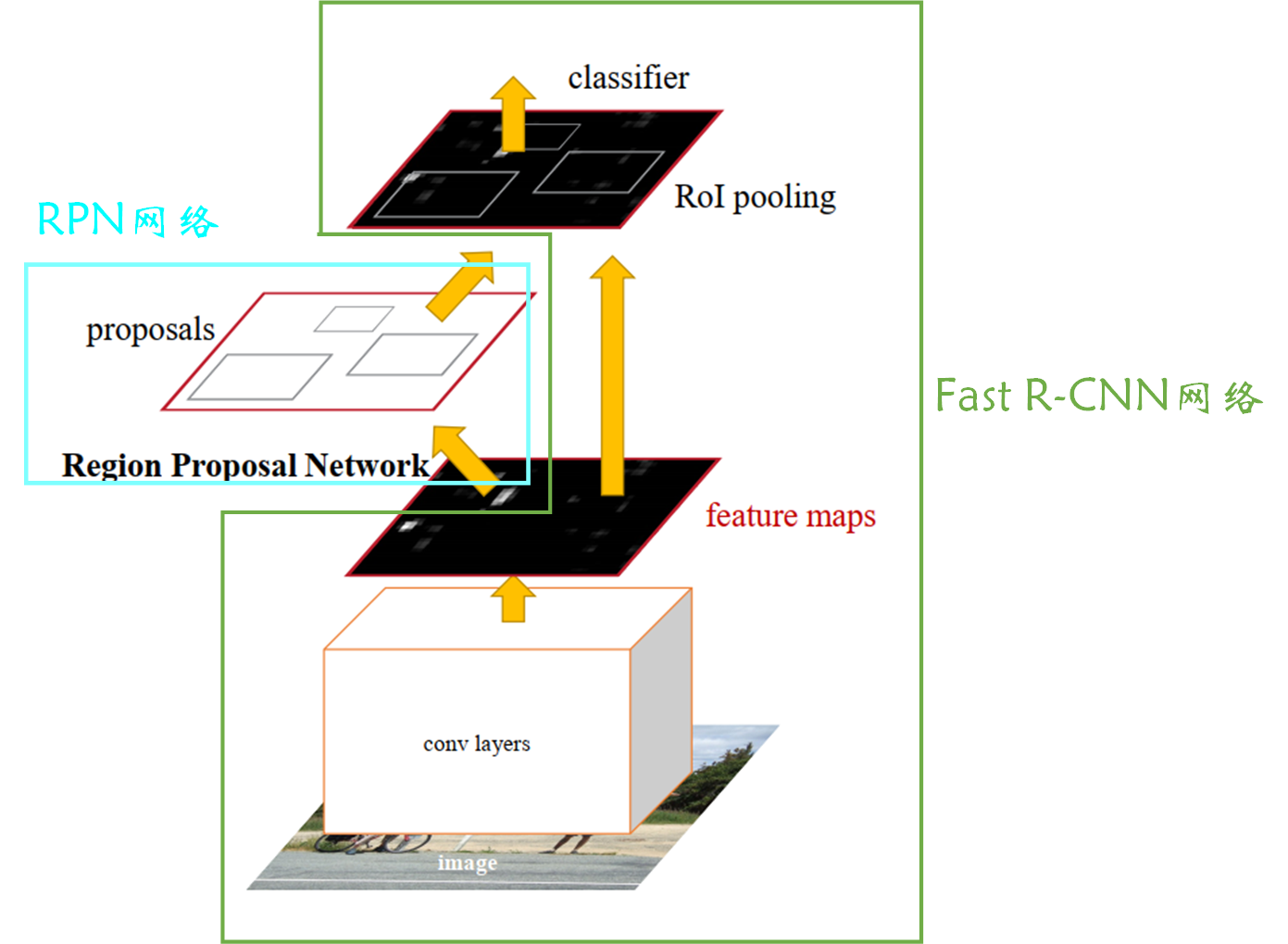
倘若你是第一次看Faster R-CNN,看了这个图,我觉得你还是处于一个比较懵逼的状态。但是没有关系,这个图是论文中所给的,我贴在这里的主要目的是想让你大致知道Faster R-CNN的结构就好,那么灵魂一问——大致结构你知道了嘛?
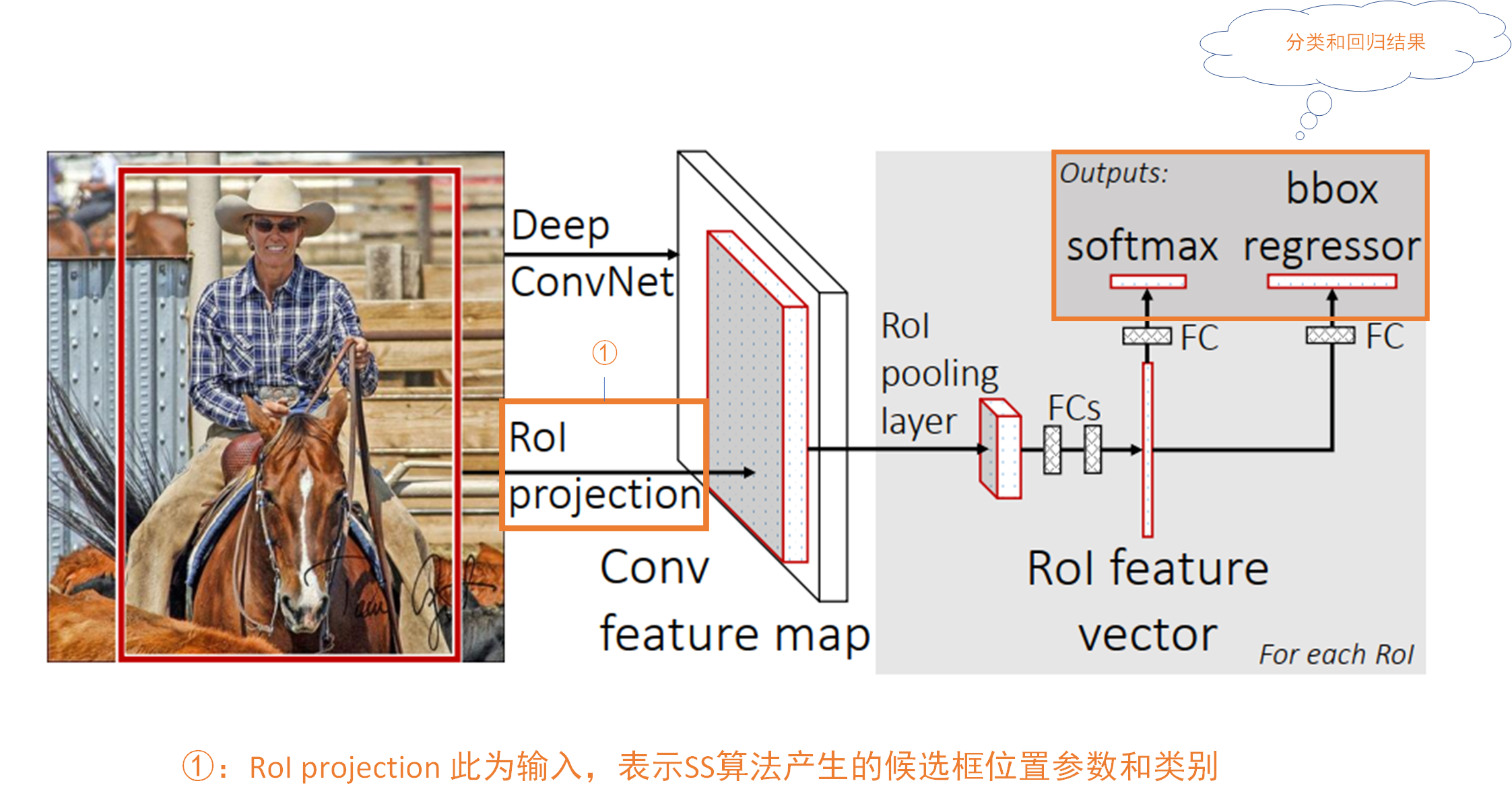
其实呀,Faster R-CNN的结构和Fast R-CNN还是很像的,都会产生一些候选框,然后基于特征提取网络对这些候选框进行分类和回归操作,不同的是Fast R-CNN采用的是传统的SS算法提取候选框,而Faster R-CNN采用RPN网络来进行提取。
好了,Faster R-CNN整体流程部分就介绍这么多,你肯定还是存在着诸多疑惑,不用急,下面我们一步步的讲解。
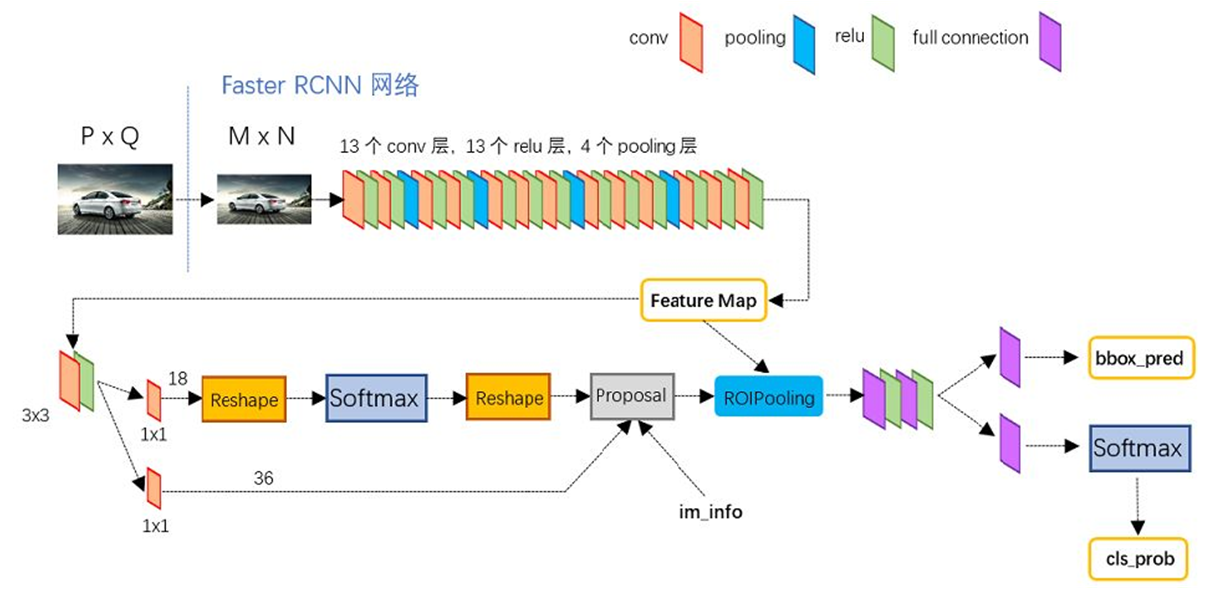
想想这里还是再加点内容,见下图,其是Faster R-CNN较为详细的流程图,后文我也会按照这个结构为大家讲述,这样应该会更清晰点。
特征提取网络
特征提取网络结构如下图所示:
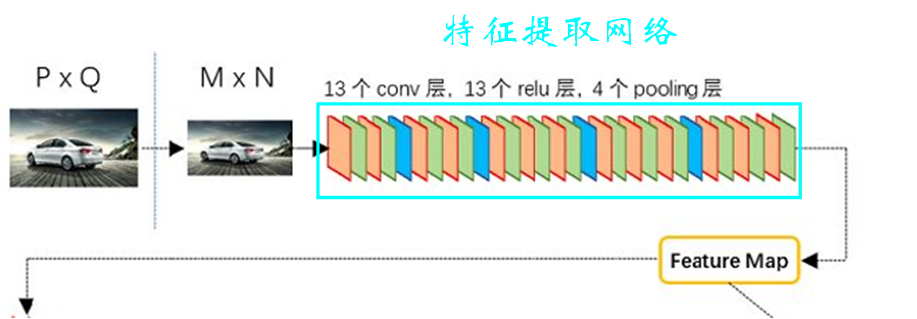
可以看到,对于一个P*Q大小的图片,我们先将其resize到特定的M*N大小,之后再送入特征提取网络。【注:这里图片尺寸没有加通道数,大家理解就好】
此外,可以看到图中的特征提取网络有13个卷积层,4个池化层,其实这个特征提取网络用到就是大名鼎鼎的VGG。【注:在VGG网络中有13个卷积层,5个池化层,这里丢弃了最后一个池化层】
对于VGG网络不熟悉的可以点击***了解详情。值得一提的是在VGG网络中,卷积采用的都是3*3的卷积核,卷积后特征图尺寸不变;而池化采用的是2*2的池化核,池化后特征图尺寸减半。也就是说,在上图的特征提取网络中,含有四个池化层,因此我们最终得到的特征图的尺寸是原来的 1 16 \frac{1}{ {16}} 161,即为 M 16 ∗ N 16 \frac{M}{ {16}}*\frac{N}{ {16}} 16M∗16N 。
还有一点也值得注意,即本次讲解的特征提取网络是VGG,我们一般称之为backbone(骨干网络)。这个backbone是可以根据需求更换的,像换成ResNet、MobileNet等等都是可以的。
RPN网络结构
RPN的网络结构如下:
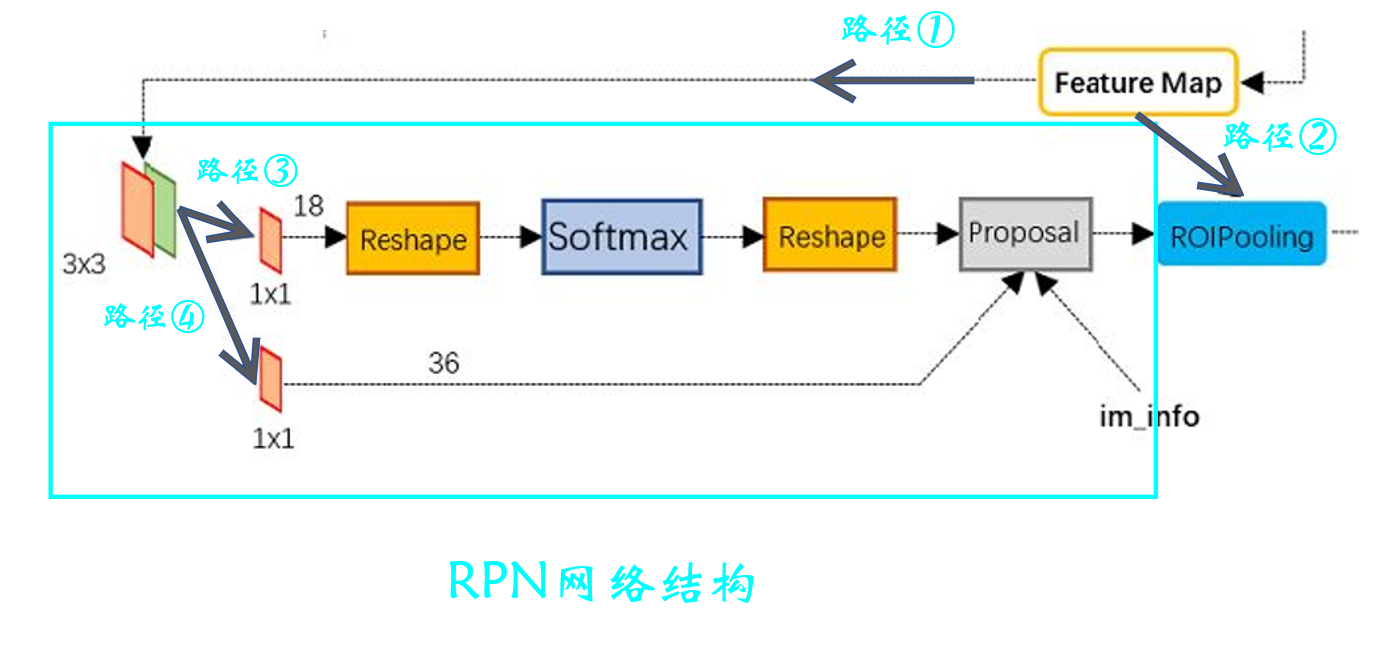
我们上一步已经得到了 M 16 ∗ N 16 \frac{M}{ {16}}*\frac{N}{ {16}} 16M∗16N大小的特征图(Feature Map)【注:为方便后文叙述,现令 W = M 16 , H = N 16 W=\frac{M}{ {16}},H=\frac{N}{ {16}} W=16M,H=16N】,可以看到我们会对特征图分别进行路径①和路径②上的操作,其中路径①上的操作即为RPN网络结构。下面我们就来重点谈谈这个RPN网络结构。
首先我们先来明确RPN是用来干什么的?enmmm…,要是这个网络的作用现在还不知道的话那我前面真是白说了,有点失败。但是这一点再强调也不为过——RPN就是来提取候选框的!!!
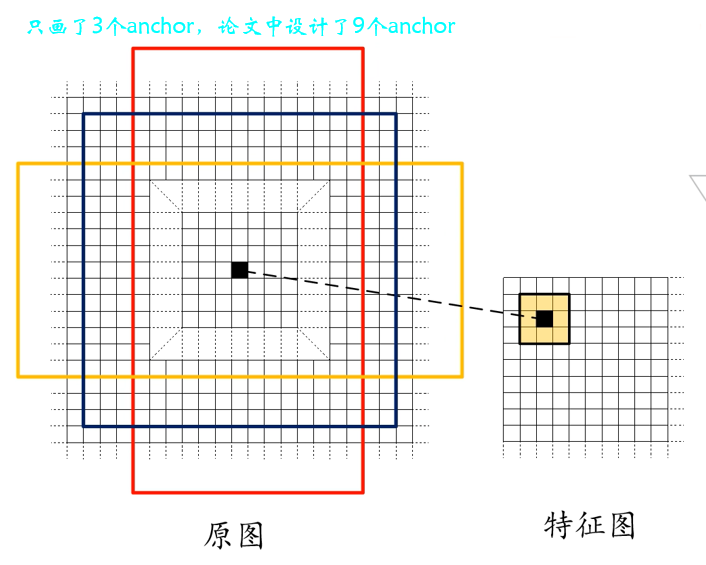
那么RPN到底是怎么做的呢?首先,我们会用一个3*3的滑动窗口遍历刚刚得到的特征图,之后计算出滑动窗口中心点对应原始图像上的中心点, 最后在原始图像每个中心点绘制9种anchor boxes 。【注:怎么由特征图的中心点坐标得到原图的中心点呢?——我们采用的是VGG骨干网络,原图和特征图尺寸相差16倍,因此只需要将特征图中心点坐标乘16即可;或者我们可以计算出中心点在特征图中的相对位置,进一步得到原图中心点位置】
我们需要在原图中绘制9中anchor,论文中给出三种尺度(128*128 、256*256 、512*512)和三种比例(1:1、1:2、2:1)一共9种anchor,说是由经验设计,其实我们在实现过程中是可以根据任务调整的,比如我们要检测的目标较小,那么就可以适当减小anchor的尺寸。特征图中心点到原图的大致映射关系图如下:
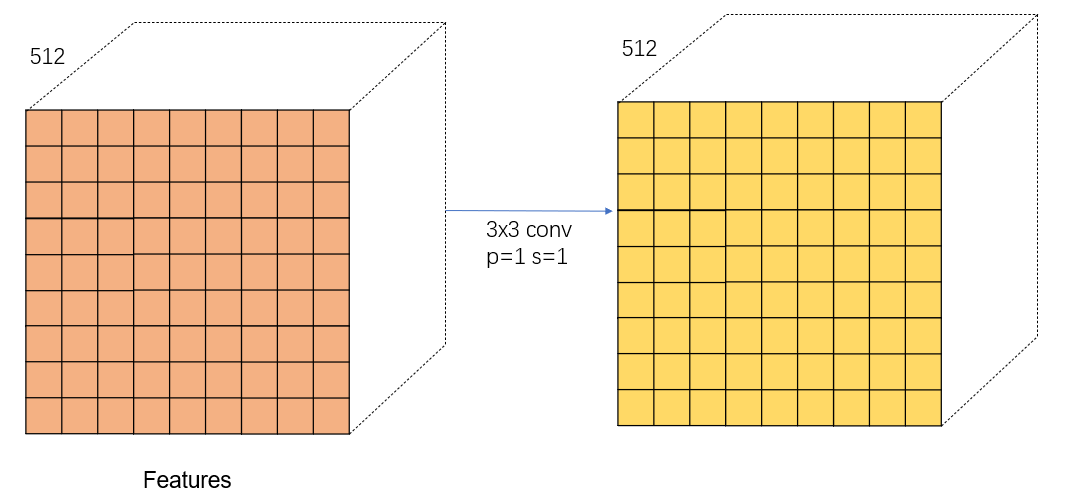
上文谈到使用3*3的滑动窗口遍历特征图,其实这就对应了图4.1路径①中的第一个3*3的卷积,卷积过程padding=1,stride=1。其中该卷积和原图生成anchor的对应关系如下图所示:可见经过这一步我们会在原图上生成许多许多的anchor,很明显这些anchor很多都是我们不需要的,后面就会对这些anchor进行取舍。

接下来我们看看经过3*3卷积后特征图的变化,因为采用的是卷积核k=3*3,p=1,s=1的卷积,所以卷积后特征图尺寸没有发生变化,这里说一下这个channel=512是由于VGG网络最后一层的输出通道数为512。
再来对照图4.1看看3*3的卷积后进行了什么操作?3*3卷积后由分别走路径③和路径④进行相关操作。其实路径③就是对刚刚得到的anchor进行分类(前景和背景),而路径④则是对anchor进行回归微调。
那么就分别来讲讲③和④,首先先来谈谈路径③。首先进行一个1*1的卷积,卷积核个数为18。如下图所示:
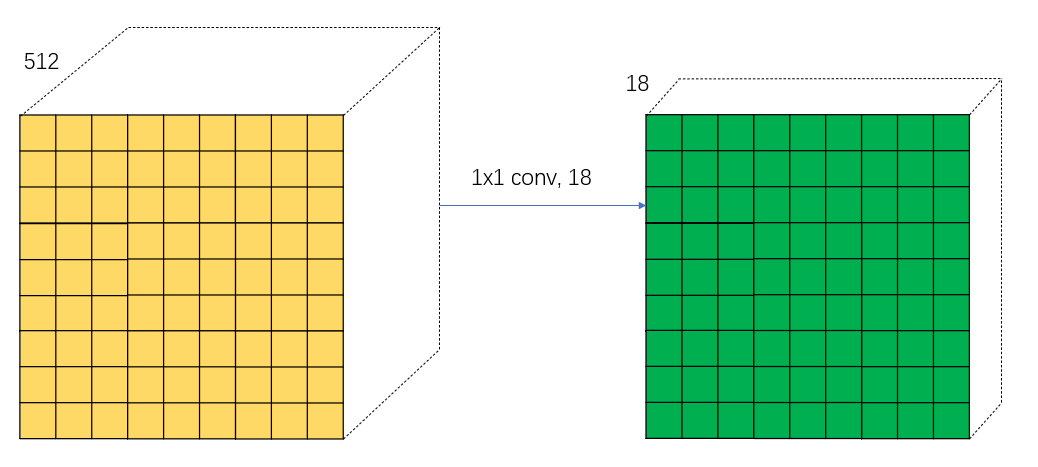
其实上图采用18个卷积核是很有讲究的。首先我们要知道的是路径③我们要做的是区分每个anchor是前景还是背景,即分成两个类别,而对于每个小方格都会在原图上生成9个anchor。这样2*9=18,得到的结果中每个小方块就代表原始图像中某个位置每个anchor是否为前景或背景的概率。为方便大家理解,抠出某个方格对18通道的数据进行解释,如下图所示:
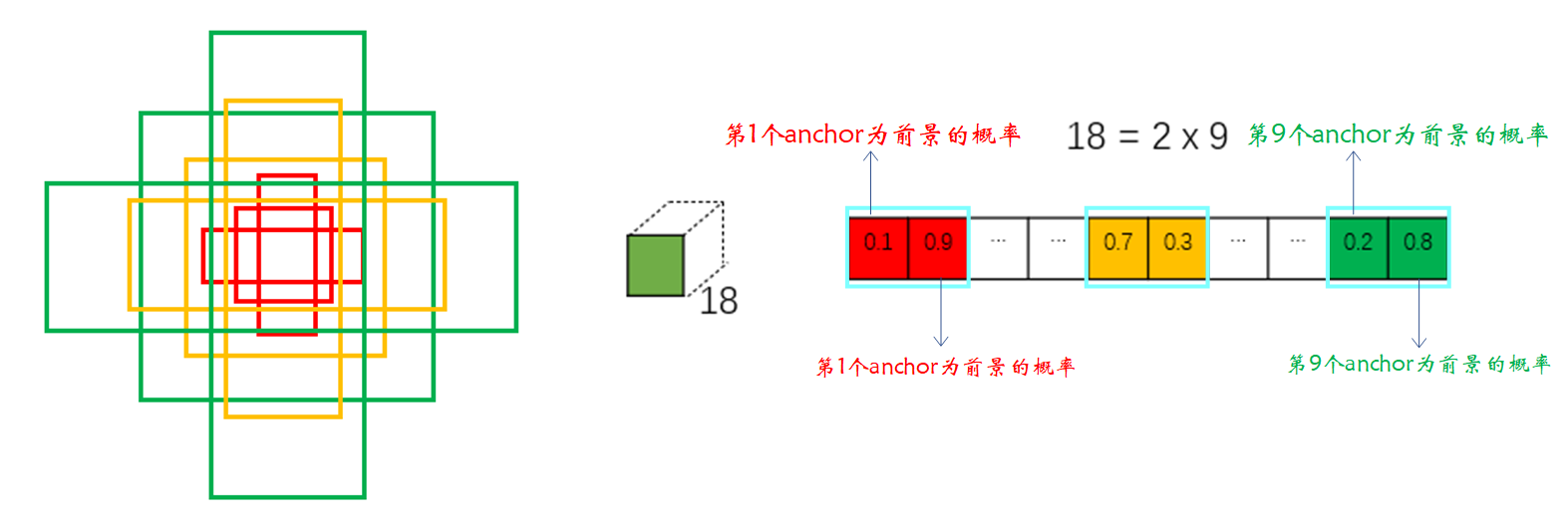
1*1的卷积后,就进行了softmax层进行分类。【注:在softmax层前后都有一个reshape的操作,这是因为在编写代码时会对输入的格式有要求,这里大家可以先不关心,后面讲解代码时在叙述】 softmax层分类后我们会得到所有的正类的anchor(positive anchors)和负类的anchor(negative anchors)。
这里补充一下正负样本的选取规则:正样本有两个条件,第一:选取与真实框IOU最大的anchor;第二:选取与真实框IOU大于0.7的anchor。【注:其实大部分情况第二个条件都可以满足,但是防止存在一些极端情况设置了条件一】负样本的选取条件为与所有真实框IOU都小于0.3的anchor。
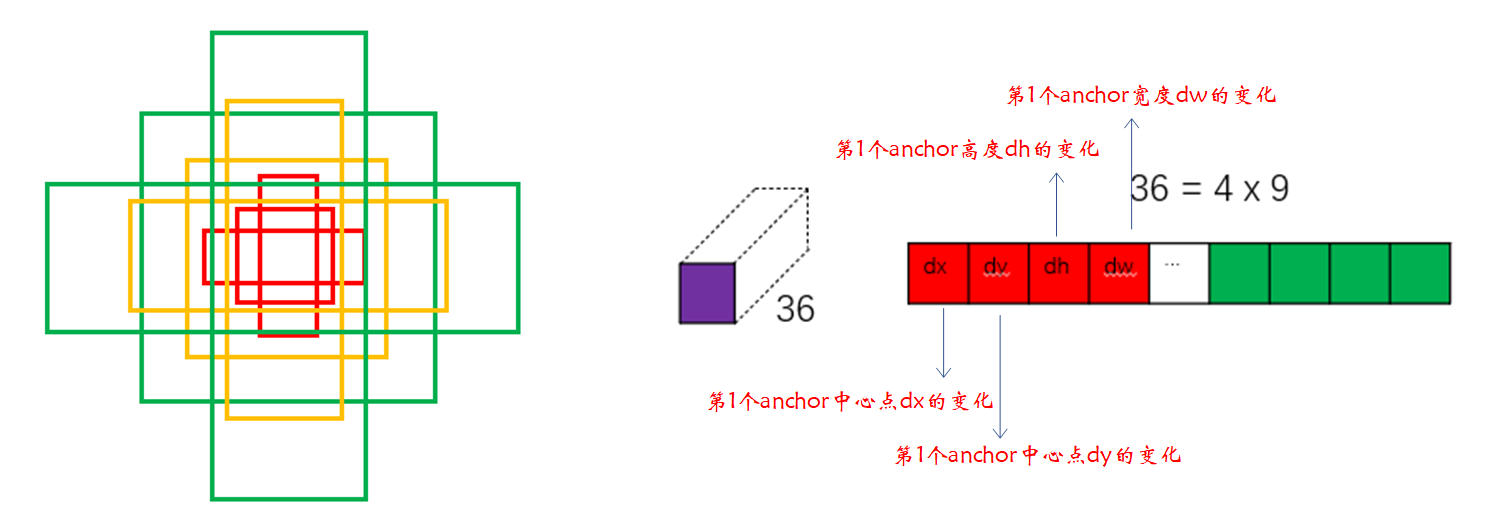
接着就来谈谈路径④,同样的,先是一个1*1的卷积,卷积核个数为36。如下图所示:
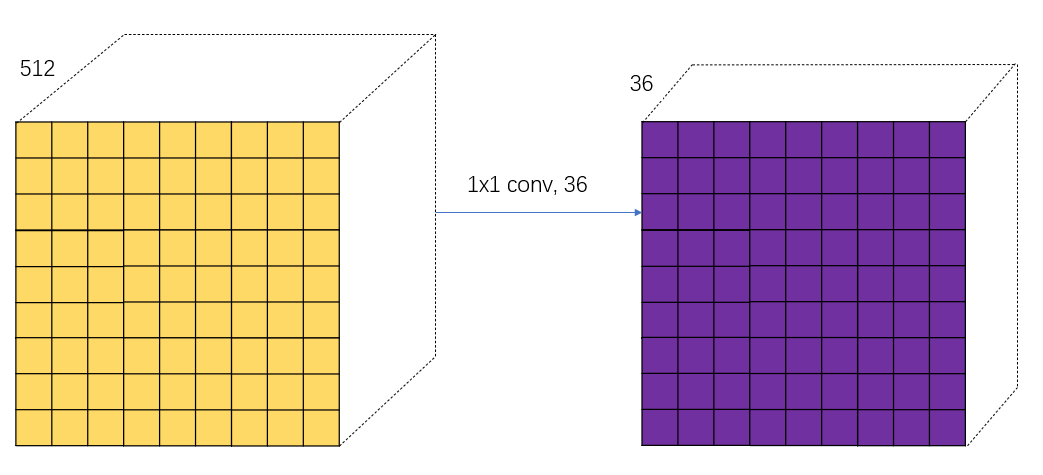
这里的36同样是有讲究的呀,因为在进行回归微调anchor的时候每个anchor需要四个参数,4*9=36,得到的结果中每个小方块就代表原始图像中某个位置每个anchor四个需要调整的参数。同样也画个图片帮助大家理解,如下:
接下来路径③和路径④在Proposal这步结合,这步是干什么的呢?其实呀,这一步就是综合了路径③和路径④中的信息,即分类结果和anchor框的回归参数,目的是得到更加精确的候选框(Region Proposal)。细心的同学可能还发现了proposal这步还有一个输入,即im_info,这个参数保存了一些图片尺寸变换的信息,像开始的resize,后面的池化等等。
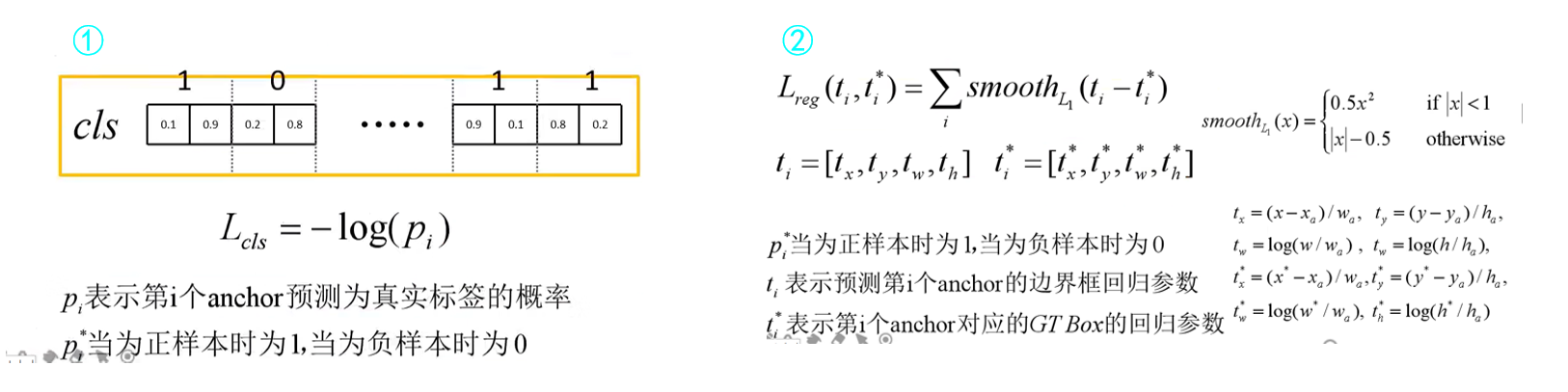
RPN层损失函数
RPN层的损失函数如下:RPN层的分类损失和fast R-CNN类似,也是由两部分组成,即分类损失和边界框回归损失。
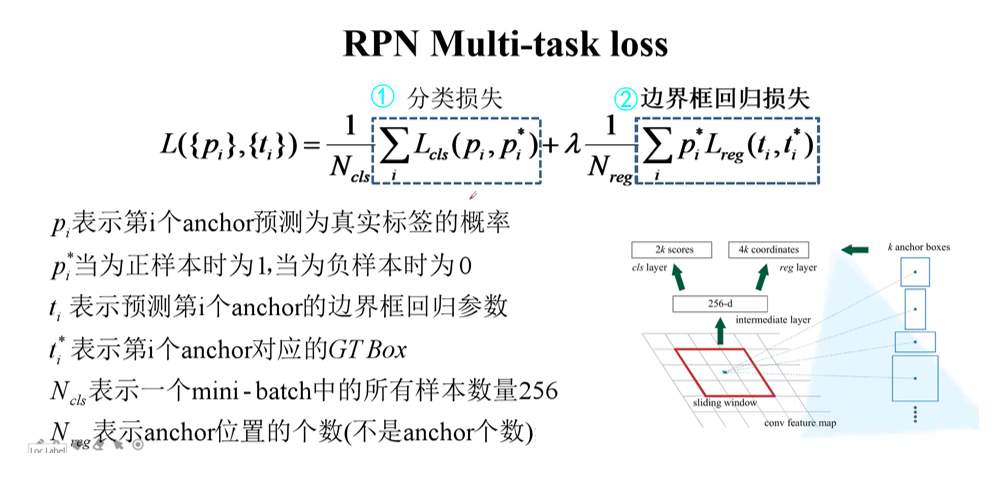
下面来具体看看①和②部分:【注:边界框回归损失在之前文章 R-CNN中有介绍,不明白的可以去了解一下】
ROI Pooling
上文已经较为详细的讲述了RPN层,即我们图4.1中的①路径,接下来我们继续来讲路径②【路径②为ROI Pooling层】。可以看到ROI Pooling层的输入有两个:分别为
- 原始的feature maps
- RPN输出的proposal
ROI Pooling层我在fast R-CNN中已经讲过了,这里就不过多叙述了,不明白的可以前去充充能。
不过这里我还是想说明一点:我们传入ROI Pooling层的输入为原始特征图和RPN输出的候选框,我们相当于是把每个候选框对应到原始特征图的不同部分,然后把这些部分剪裁下来分别传入ROI Poolinng层。
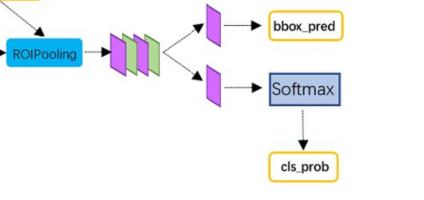
分类回归微调部分
后面这部分其实就完全和Fast R-CNN后半部分完全一致了,因为我们同样都经过ROI Pooling层得到了候选框的相关特征,接着送入分类和回归网络即可。这部分有不明白的也欢迎去阅读我之前文章对此部分的讲解。
小结
这部分来总结一下Faster R-CNN的步骤,如下:
- 将完整图像输入网络得到相应的特征图
- 使用RPN结构生成候选框,将RPN生成的候选框投影到原始特征图获取相应的特征矩阵【相当于我们ROI Pooling部分所说通过剪裁得到的结果】
- 特征矩阵经ROI pooling层缩放至统一大小,后将特征图展平得到预测结果
至此,Faster R-CNN的理论部分就都将完了,希望大家都能有所收获。
参考资料
如若文章对你有所帮助,那就
咻咻咻咻~~duang~~点个赞呗
边栏推荐
- [MySQL 8.0 does not support capitalization of table names - corresponding scheme]
- 基于Cortex-M3、M4的GPIO口位带操作宏定义(可总线输入输出,可用于STM32、ADuCM4050等)
- vim
- MySQL setting trigger problem
- Xiaomi written test real question 1
- 并发编程 — 死锁排查及处理
- Lexin interview process
- GDB code debugging
- Executealways of unity is replacing executeineditmode
- cgroup_ memcg
猜你喜欢

Netease to B, soft outside, hard in
Ros2 - function package (VI)

Intelligent target detection 59 -- detailed explanation of pytoch focal loss and its implementation in yolov4
Brief description of inux camera (Mipi interface)
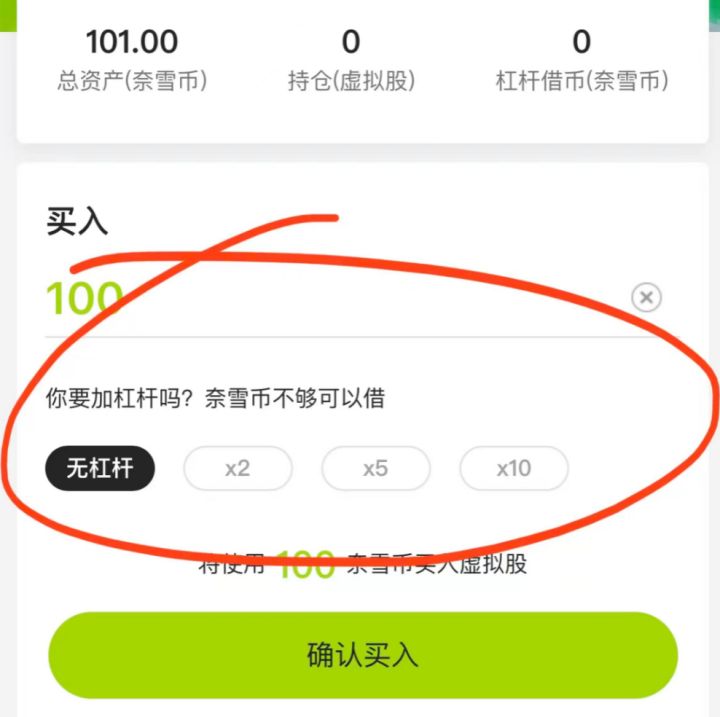
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
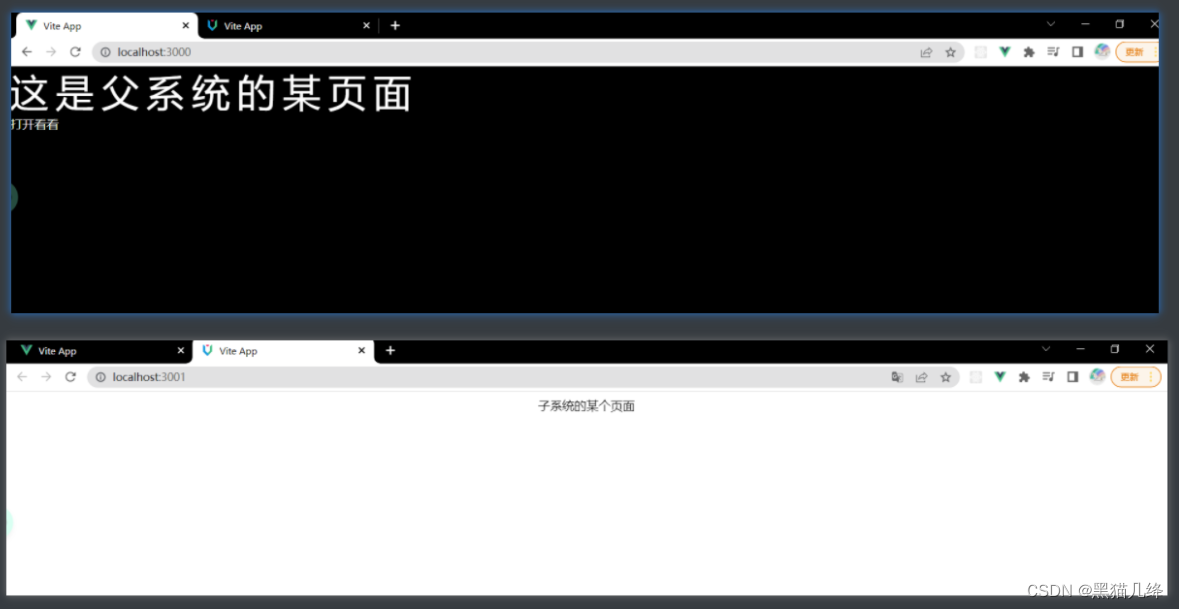
PostMessage communication
Skywalking全部
iNFTnews | 喝茶送虚拟股票?浅析奈雪的茶“发币”
Concurrent programming - deadlock troubleshooting and handling
Concurrent programming - how to interrupt / stop a running thread?
随机推荐
PHY drive commissioning - phy controller drive (II)
A brief introduction to heading/pitch/roll and omega/phi/kappa
逻辑结构与物理结构
Marvell 88e1515 PHY loopback mode test
Error: “MountVolume.SetUp failed for volume pvc 故障处理
【obs】x264编码:“buffer_size“
【软件测试】04 -- 软件测试与软件开发
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
Unity UGUI不同的UI面板或者UI之间如何进行坐标匹配和变换
Ros2 - function package (VI)
U-Boot初始化及工作流程分析
SD_ CMD_ RECEIVE_ SHIFT_ REGISTER
An article was opened to test the real situation of outsourcing companies
Qt项目中的日志库log4qt使用
cgroup_ memcg
Volcano resource reservation feature
IPage能正常显示数据,但是total一直等于0
window navicat连接阿里云服务器mysql步骤及常见问题
三体目标管理笔记
Cookie、Session、JWT、token四者间的区别与联系