当前位置:网站首页>Basic concepts of LTE user experience
Basic concepts of LTE user experience
2022-07-06 03:36:00 【Embedded workplace】
边栏推荐
- 施努卡:什么是视觉定位系统 视觉系统如何定位
- Overview of super-resolution reconstruction of remote sensing images
- Precautions for single chip microcomputer anti reverse connection circuit
- Leetcode problem solving -- 108 Convert an ordered array into a binary search tree
- SWC introduction
- How to choose PLC and MCU?
- 【Qt5】Qt QWidget立刻出现并消失
- Pytorch基础——(2)张量(tensor)的数学运算
- Arabellacpc 2019 (supplementary question)
- NR modulation 1
猜你喜欢
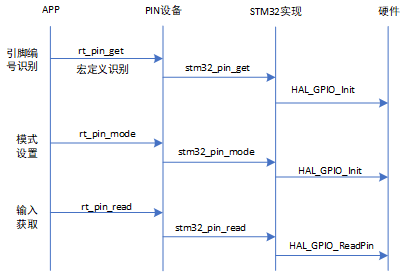
2.2 STM32 GPIO operation

深入刨析的指针(题解)
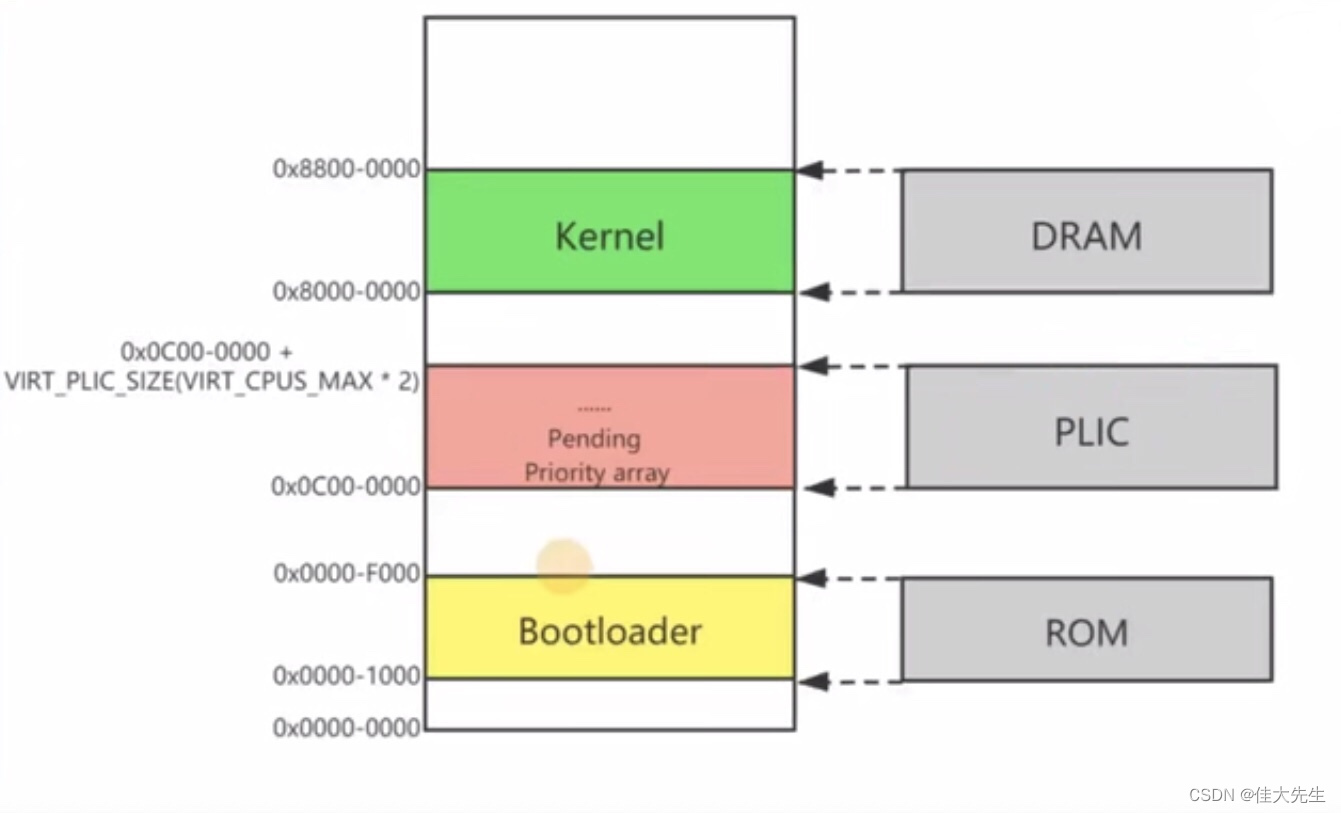
【RISC-V】外部中断
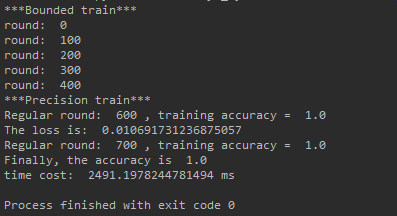
Teach you to build your own simple BP neural network with pytoch (take iris data set as an example)
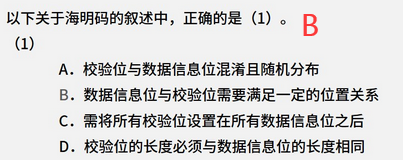
1.16 - check code
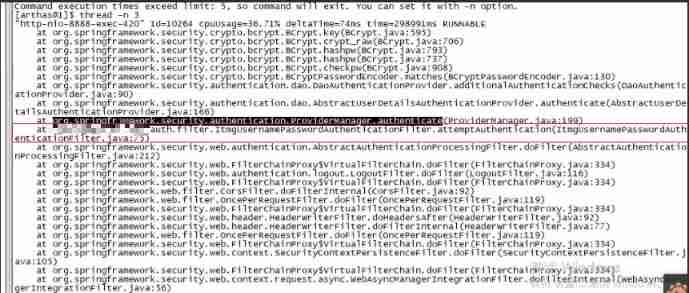
Performance analysis of user login TPS low and CPU full
![[slam] orb-slam3 parsing - track () (3)](/img/87/b580837778c2c9f6bac5ba49403d6b.png)
[slam] orb-slam3 parsing - track () (3)

svg拖动点裁剪图片js特效
EDCircles: A real-time circle detector with a false detection control 翻译
1. New project
随机推荐
BUAA计算器(表达式计算-表达式树实现)
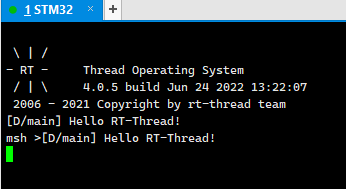
3.1 detailed explanation of rtthread serial port device (V1)
2. GPIO related operations
数据分析——seaborn可视化(笔记自用)
MySQL Server层四个日志
Recommended foreign websites for programmers to learn
Performance analysis of user login TPS low and CPU full
Quartz misfire missed and compensated execution
Leetcode problem solving -- 173 Binary search tree iterator
Schnuka: 3D vision detection application industry machine vision 3D detection
Precautions for single chip microcomputer anti reverse connection circuit
Pointer written test questions ~ approaching Dachang
Arabellacpc 2019 (supplementary question)
How to choose PLC and MCU?
指针笔试题~走近大厂
C language judgment, ternary operation and switch statement usage
mysql从一个连续时间段的表中读取缺少数据
遥感图像超分辨重建综述
Crazy, thousands of netizens are exploding the company's salary
Svg drag point crop image JS effect