边栏推荐
- 现在有html文件,和用vs制作的mvc(连接了数据库),怎么两个相连?
- SD_CMD_SEND_SHIFT_REGISTER
- 【obs】x264编码:“buffer_size“
- 三体目标管理笔记
- 你心目中的数据分析 Top 1 选 Pandas 还是选 SQL?
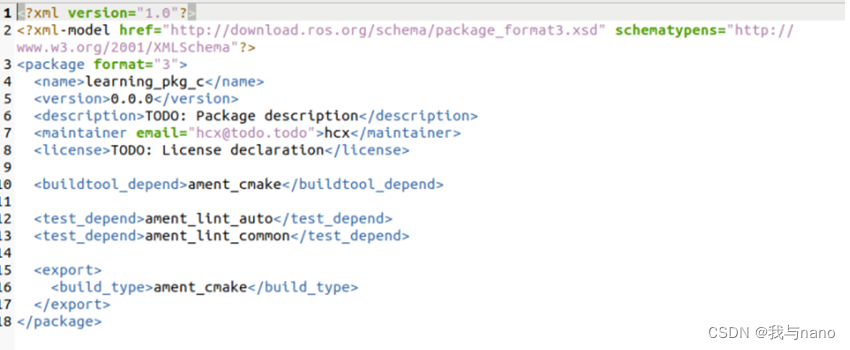
- Ros2 - configuration development environment (V)
- [software testing] 02 -- software defect management
- Literacy Ethernet MII interface types Daquan MII, RMII, smii, gmii, rgmii, sgmii, XGMII, XAUI, rxaui
- Volcano resource reservation feature
- Mipi interface, DVP interface and CSI interface of camera
猜你喜欢

![[software testing] 03 -- overview of software testing](/img/1e/0b6458160e34e43f021ea4797de70a.jpg)
随机推荐
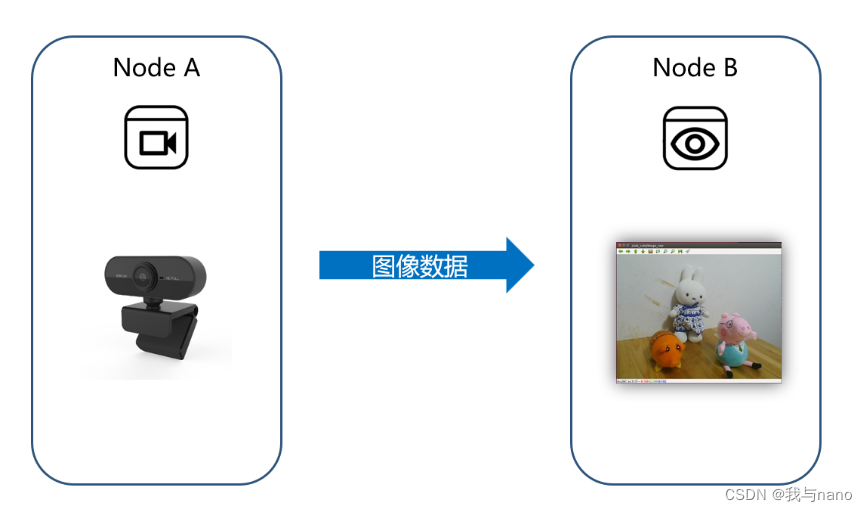
Ros2 topic (VIII)
[software testing] 05 -- principles of software testing
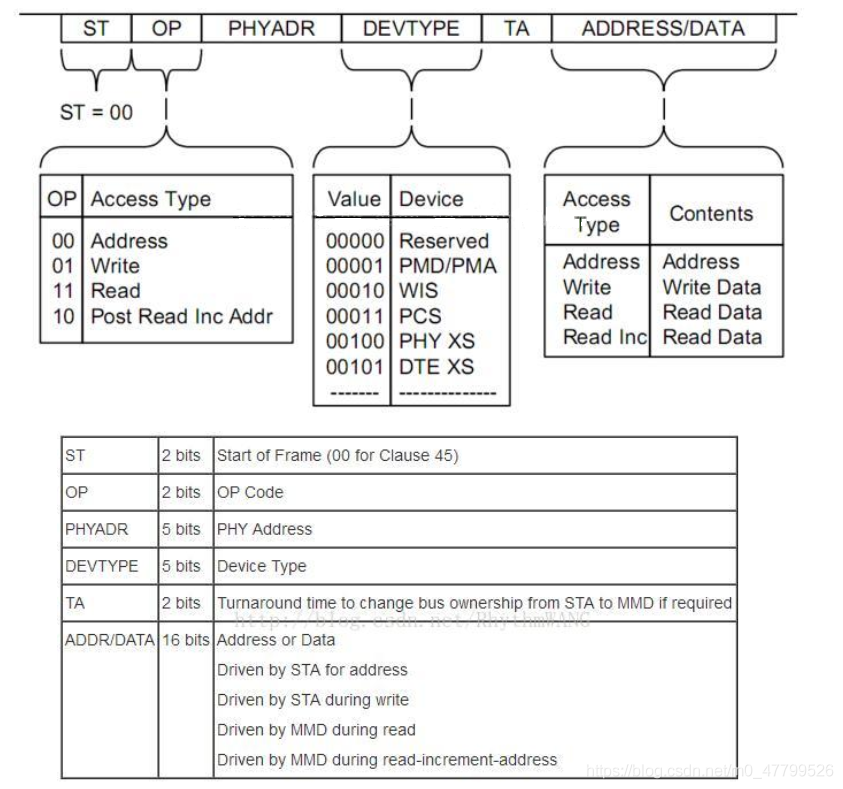
PHY驱动调试之 --- MDIO/MDC接口22号和45号条款(一)
解读最早的草图-图像翻译工作SketchyGAN
Xavier CPU & GPU high load power consumption test
MySQL setting trigger problem
C语言数组专题训练
[software testing] 03 -- overview of software testing
Unity 之 ExecuteAlways正在取代ExecuteInEditMode
Ros2 - workspace (V)
Ros2 - configuration development environment (V)
Docker installs MySQL and uses Navicat to connect
IPage能正常显示数据,但是total一直等于0
【obs】x264编码:“buffer_size“
逻辑结构与物理结构
Import CV2 prompt importerror: libgl so. 1: Cannot open shared object file: no such file or directory
Import CV2, prompt importerror: libcblas so. 3: cannot open shared object file: No such file or directory
ModuleNotFoundError: No module named ‘picamera‘
D2L installation
Netease to B, soft outside, hard in