当前位置:网站首页>Laser slam learning record
Laser slam learning record
2022-07-05 23:45:00 【High flying birds with tanks】
Catalog
Write it at the front
1、 The content of this article is
laser slam Learning and problem records
2、 platform
ubuntu 1804, ros
3、 Reprint please indicate the source :
https://blog.csdn.net/qq_41102371/article/details/125271212
Information
Source code
loam
https://github.com/HKUST-Aerial-Robotics/A-LOAM
lego_loam
https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
livox_loam
https://github.com/hku-mars/loam_livox
ekf_loam
https://github.com/ITVRoC/ekf_loam
Representative laser SLAM Algorithm paper and open source code summary
https://zhuanlan.zhihu.com/p/424638140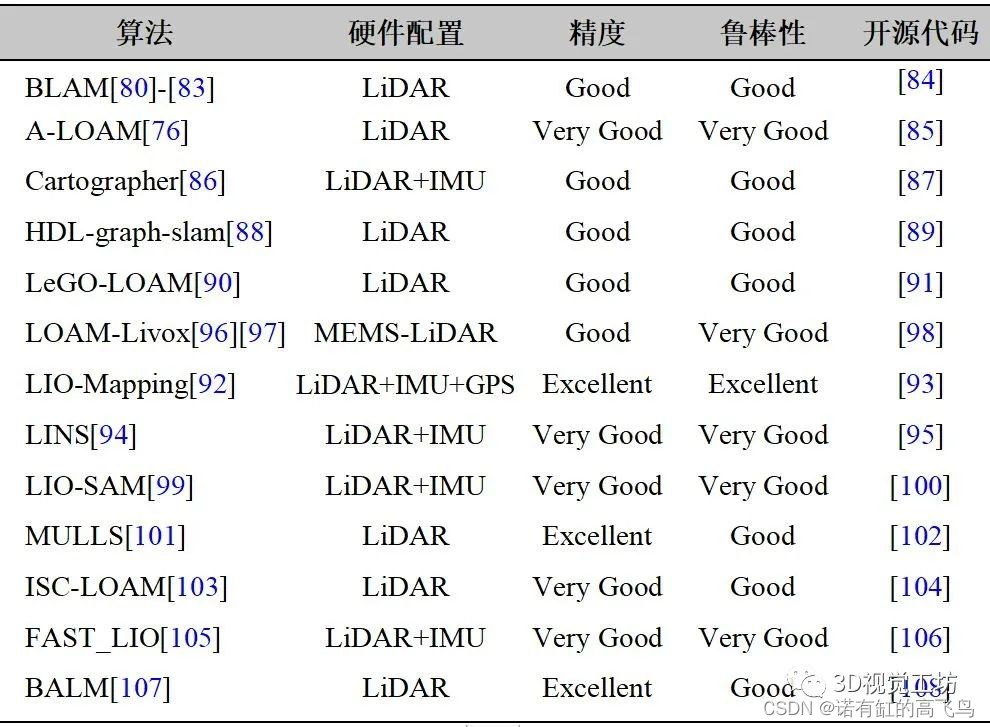
2021 SLAM Summary of conference papers
https://zhuanlan.zhihu.com/p/439932294
loam:
Twelve . laser SLAM Frame learning is livox-loam Frame installation and running data set https://zhuanlan.zhihu.com/p/432520314
eighteen . Multiple SLAM frame (A-LOAM、Lego-loam、LIO-SAM、livox-loam) Rough comparative analysis of outdoor test results https://zhuanlan.zhihu.com/p/441386977
Multi-sensor fusion SLAM、 Navigation research and learning https://www.zhihu.com/column/c_1372631607124353024
orb-slam and orb-slam2
http://webdiis.unizar.es/~raulmur/orbslam/
SLAM The road of Algorithm Engineer :A-LOAM Thesis study and framework algorithm learning https://zhuanlan.zhihu.com/p/431082432
Considering the depth of algorithm principle in each framework 、 Module architecture 、 The difficulty of debugging , The author believes that the most suitable algorithm for basic learning and recording is A-LOAM. Learning and understanding A-LOAM After a better grasp , It is more appropriate to go back to other frameworks ( Here is a suggested learning sequence :A-LOAM-> LOAM -> LEGO-LOAM -> LIO-SAM-> LVI-SAM).A-LOAM By Ji Zhang Doctor in thesis 《Lidar Odometry and Mapping in Real-time》[1] Proposed in , Use laser radar to efficiently complete its own positioning and three-dimensional mapping in space .
vscode The debug ROS project , Node debugging , Multi node debugging ,roslauch debugging
https://zhuanlan.zhihu.com/p/364972107
vscode utilize cmake debugging https://blog.csdn.net/code_segment/article/details/81151443
Kalman filtering
FAST-LIO Paper knowledge supplement — Kalman filtering https://zhuanlan.zhihu.com/p/485454339
Explain the principle of Kalman filter in detail https://blog.csdn.net/u010720661/article/details/63253509
problem
livox_loam
need pcl1.9 Above version
https://blog.csdn.net/weixin_48083022/article/details/119043406
Ubuntu18.04 install PCL( Detailed tutorial ) https://www.guyuehome.com/10039
Ubuntu18.04 install PCL 1.9.1( Graphic, , With step pits and tests ) https://blog.csdn.net/qq_42257666/article/details/124574029
compile pcl We have problems :
/usr/lib/x86_64-linux-gnu/libSM.so: Yes ‘[email protected]_1.0’ Undefined references
solve :
hold anaconda3/lib Inside libuuid.xxx Move the file to another place first
https://www.codeleading.com/article/14915214739/
https://www.jianshu.com/p/459d4242b3d0
Reference resources
Listed in the text
End
Any errors , Please correct me
边栏推荐
- Spire Office 7.5.4 for NET
- UVA11294-Wedding(2-SAT)
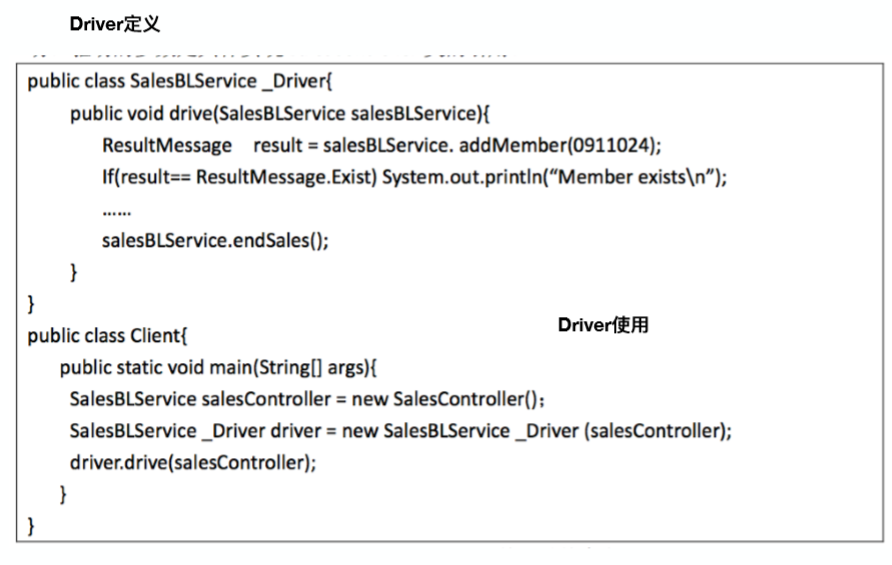
- VS2010 writes DLL and unit test of dynamic link library, and transfers the correctness of DLL test
- MySQL delete uniqueness constraint unique
- 4 points tell you the advantages of the combination of real-time chat and chat robots
- 20. Migrate freetype font library
- CIS基准测试工具kube-bench使用
- 《牛客刷verilog》Part III Verilog企业真题
- AsyncSocket长连接棒包装问题解决
- Huawei simulator ENSP - hcip - MPLS experiment
猜你喜欢
成为程序员的你,后悔了吗?
98. Verify the binary search tree ●●
开源crm客户关系统管理系统源码,免费分享
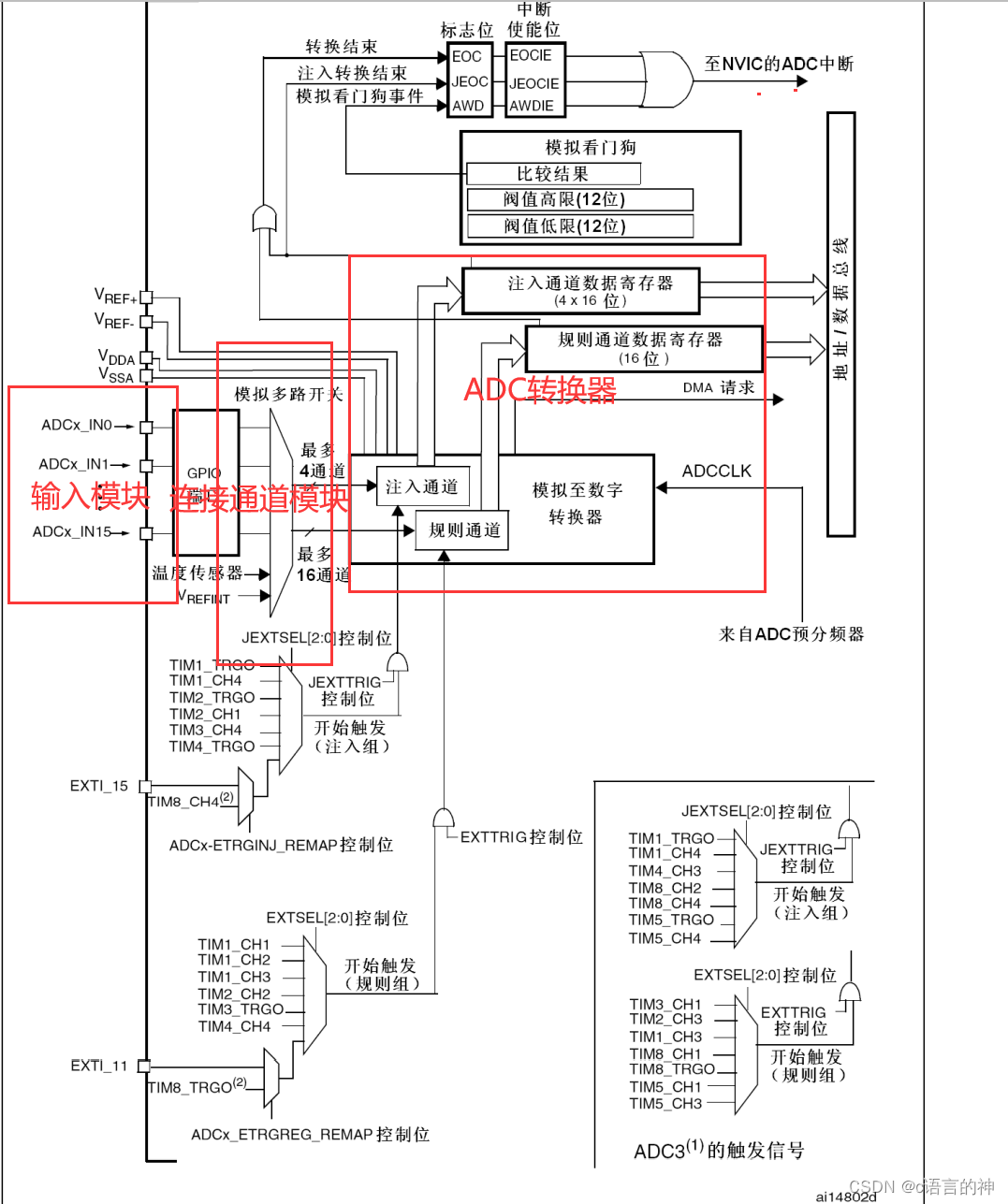
STM32__ 06 - single channel ADC
保研笔记四 软件工程与计算卷二(8-12章)
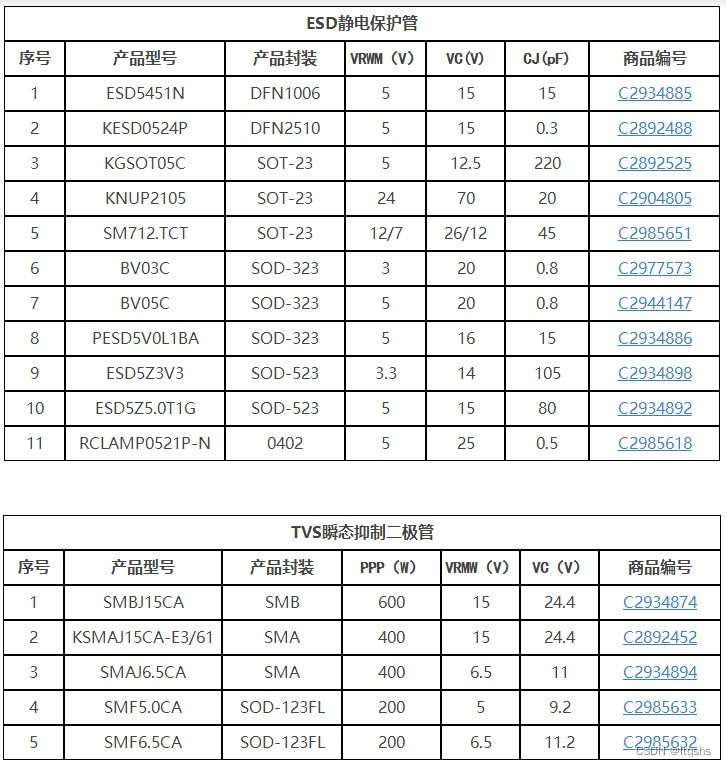
TVS管和ESD管的技術指標和選型指南-嘉立創推薦
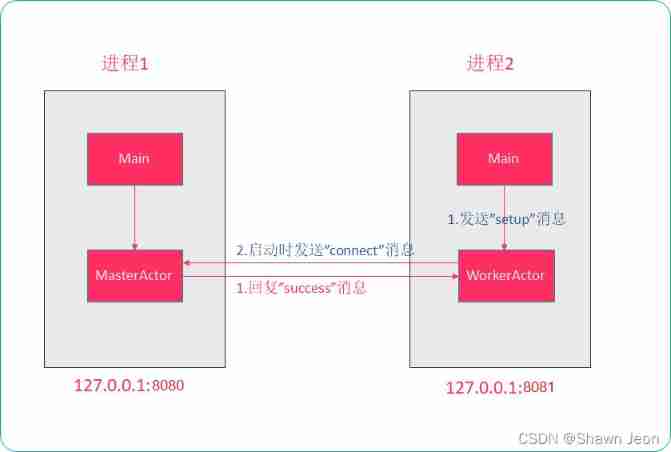
Scala concurrent programming (II) akka

21. PWM application programming
The PNG image is normal when LabVIEW is opened, and the full black image is obtained when Photoshop is opened
98. 验证二叉搜索树 ●●
随机推荐
20220703 week race: number of people who know the secret - dynamic rules (problem solution)
698. 划分为k个相等的子集 ●●
Naoqi robot summary 26
asp.net弹出层实例
Common static methods of math class
The interface of grafana tool displays an error, incluxdb error
poj 2762 Going from u to v or from v to u? (infer whether it is a weak link diagram)
STM32__ 06 - single channel ADC
UVA – 11637 garbage remembering exam (combination + possibility)
Russian Foreign Ministry: Japan and South Korea's participation in the NATO summit affects security and stability in Asia
芯源&立创EDA训练营——无刷电机驱动
[original] what is the core of programmer team management?
Rethinking about MySQL query optimization
21. PWM application programming
Research notes I software engineering and calculation volume II (Chapter 1-7)
4点告诉你实时聊天与聊天机器人组合的优势
Neural structured learning - Part 2: training with natural graphs
【LeetCode】5. Valid Palindrome·有效回文
GFS Distributed File System
2022.6.20-6.26 AI行业周刊(第103期):新的小生命