当前位置:网站首页>[论文阅读] CarveMix: A Simple Data Augmentation Method for Brain Lesion Segmentation
[论文阅读] CarveMix: A Simple Data Augmentation Method for Brain Lesion Segmentation
2022-07-04 23:48:00 【xiongxyowo】
Abstract
脑部病变分割(Brain Lesion Segmentation)为临床诊断提供了宝贵的工具,卷积神经网络(CNN)在该任务中取得了空前的成功。数据增强是一种广泛使用的策略,可以提高CNN的训练效果,而用于脑部病变分割的增强方法的设计仍然是一个开放的问题。在这项工作中,我们提出了一种简单的数据增强方法,被称为CarveMix,用于基于CNN的脑部病变分割。与其他基于"混合"的方法一样,如Mixup和CutMix,CarveMix随机地结合两个现有的标记图像来生成新的标记样本。然而,与这些基于图像组合的增强策略不同,CarveMix是病变感知的,在进行组合时要注意病变,并为生成的图像创建适当的标注。具体来说,我们根据病变的位置和几何形状,从一个标记的图像中刻出一个感兴趣的区域(ROI),ROI的大小从一个概率分布中取样。然后,雕刻好的ROI取代了第二张标记图像中的相应体素,第二张图像的注释也相应被取代。通过这种方式,我们为网络训练生成新的标记图像,并且保留了病变信息。为了评估所提出的方法,我们在两个大脑病变数据集上进行了实验。结果表明,与其他简单的数据增强方法相比,我们的方法提高了分割的准确性。
Method
本文是一种专门为脑部病变分割提出的数据增强方法——CarveMix。该方法也是一种基于标签融合的方法,比如MixUp(ICLR 18)就是将两个标签给线性融合起来,而CarveMix(ICCV 19)则是一种非线性的融合。需要注意的是,这些经典的方法都是用于图像分类任务的,因此目前是比较缺乏用于分割任务的标签融合方法的。CarveMix的融合流程如下: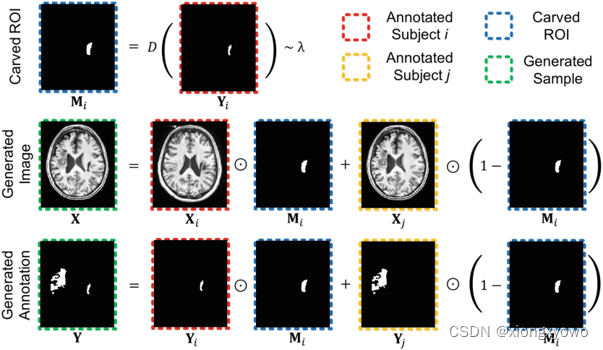
先直接看公式:融合得到的图像 X \mathbf{X} X与融合得到的标签 Y \mathbf{Y} Y的最终计算过程如下: X = X i ⊙ M i + X j ⊙ ( 1 − M i ) \mathbf{X}=\mathbf{X}_{i} \odot \mathbf{M}_{i}+\mathbf{X}_{j} \odot\left(1-\mathbf{M}_{i}\right) X=Xi⊙Mi+Xj⊙(1−Mi) Y = Y i ⊙ M i + Y j ⊙ ( 1 − M i ) \mathbf{Y}=\mathbf{Y}_{i} \odot \mathbf{M}_{i}+\mathbf{Y}_{j} \odot\left(1-\mathbf{M}_{i}\right) Y=Yi⊙Mi+Yj⊙(1−Mi) 为了直观起见,我们以标签融合为例展示具体的融合过程,图像本身的融合与标签的融合在过程上是一致的。从图中看,标签的融合基本上就约等于直接把两张原始图像的mask Y i \mathbf{Y}_i Yi和 Y j \mathbf{Y}_j Yj直接给加起来: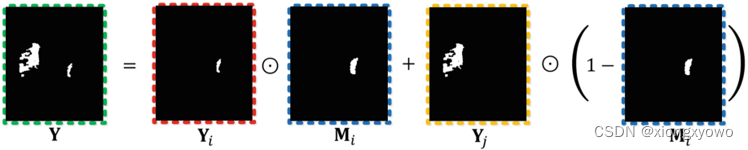
而实际上也是 Y i \mathbf{Y}_i Yi乘了一个系数 a a a后与 Y j \mathbf{Y}_j Yj乘了一个系数 b b b后再相加,有 a + b = 1 a+b=1 a+b=1。图中"⊙"符号表示逐像素乘,因此甚至也可以将 M i \mathbf{M}_i Mi视为一种空间注意力图。
现在的问题其实就是怎么计算 M i \mathbf{M}_i Mi了。从图中可以看到, M i \mathbf{M}_i Mi与 Y i \mathbf{Y}_i Yi其实是非常像的,有点类似于在 M i \mathbf{M}_i Mi的基础上进行了一个膨胀操作。具体来说, M i \mathbf{M}_i Mi中第 j j j个像素的值 M i v \mathbf{M}_i^v Miv计算方法如下: M i v = { 1 , D v ( Y i ) ≤ λ 0 , otherwise \mathbf{M}_{i}^{v}=\left\{\begin{array}{l} 1, D^{v}\left(\mathbf{Y}_{i}\right) \leq \lambda \\ 0, \text { otherwise } \end{array}\right. Miv={ 1,Dv(Yi)≤λ0, otherwise D v ( Y i ) = { − d ( v , ∂ Y i ) , if Y i v = 1 d ( v , ∂ Y i ) , if Y i v = 0 D^{v}\left(\mathbf{Y}_{i}\right)=\left\{\begin{aligned} -d\left(v, \partial \mathbf{Y}_{i}\right), & \text { if } \mathbf{Y}_{i}^{v}=1 \\ d\left(v, \partial \mathbf{Y}_{i}\right), & \text { if } \mathbf{Y}_{i}^{v}=0 \end{aligned}\right. Dv(Yi)={ −d(v,∂Yi),d(v,∂Yi), if Yiv=1 if Yiv=0 这个 d ( v , ∂ Y i ) d(v, \partial \mathbf{Y}_{i}) d(v,∂Yi)指的是当前像素 v v v与"病变边界" ∂ Y i \partial \mathbf{Y}_{i} ∂Yi的距离。可以看到,如果 v v v本身就在病变区域里面,那么 D v ( Y i ) D^{v}\left(\mathbf{Y}_{i}\right) Dv(Yi)就直接给了个负数,从而保证其有更大的概率被选中(即小于 λ \lambda λ);而如果在病变区域外,我们就认为越近越应该被选中。值得注意的是,这个 λ \lambda λ是可正可负的,从而保证对病变区域进行"膨胀"或者"收缩"。 λ \lambda λ的具体计算过程较为复杂,感兴趣的读者可以阅读原文。
边栏推荐
- [IELTS reading] Wang Xiwei reads P4 (matching2 paragraph information matching question [difficult])
- 电力运维云平台:开启电力系统“无人值班、少人值守”新模式
- French scholars: the explicability of counter attack under optimal transmission theory
- Robot reinforcement learning synergies between pushing and grassing with self supervised DRL (2018)
- [crawler] XPath for data extraction
- MP advanced operation: time operation, SQL, querywapper, lambdaquerywapper (condition constructor) quick filter enumeration class
- Qualcomm WLAN framework learning (30) -- components supporting dual sta
- js正则表达式之中文验证(转)
- Hash table, hash function, bloom filter, consistency hash
- Tester's algorithm interview question - find mode
猜你喜欢
快解析内网穿透帮助企业快速实现协同办公
【雅思阅读】王希伟阅读P3(Heading)
【kotlin】第三天

Application of multi loop instrument in base station "switching to direct"
高配笔记本使用CAD搬砖时卡死解决记录

基于三维gis平台的消防系统运用
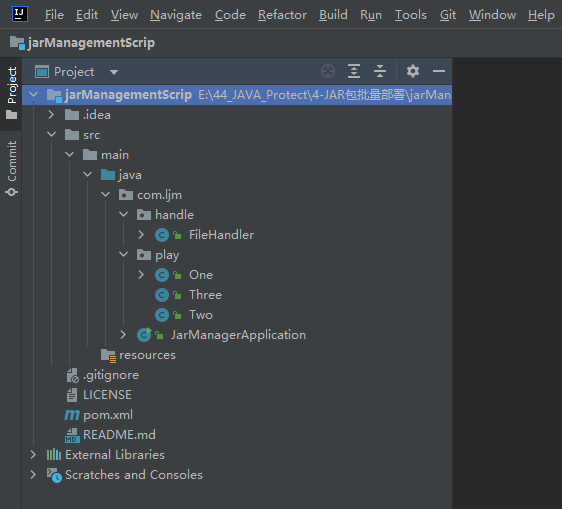
Jar批量管理小工具
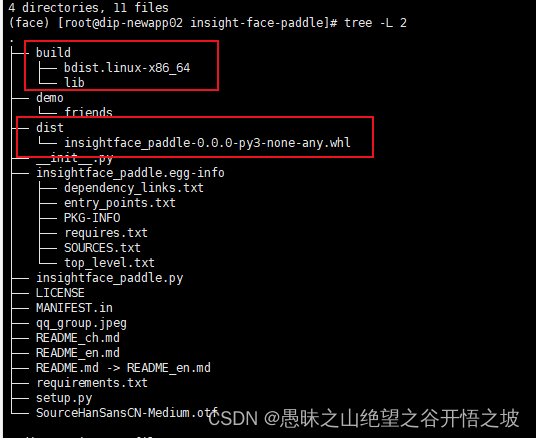
人脸识别5- insight-face-paddle-代码实战笔记

香港珠宝大亨,22亿“抄底”佐丹奴
Significance of acrel EMS integrated energy efficiency platform in campus construction
随机推荐
Go pit - no required module provides Package: go. Mod file not found in current directory or any parent
如何用快解析自制IoT云平台
端口映射和端口转发区别是什么
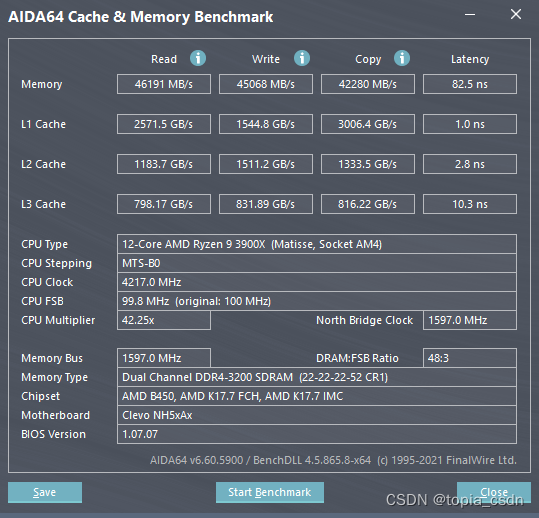
蓝天NH55系列笔记本内存读写速度奇慢解决过程记录
模板的进阶
快解析——好用的内网安全软件
js正则表达式之中文验证(转)
解决无法通过ssh服务远程连接虚拟机
CTF competition problem solution STM32 reverse introduction
Every time I look at the interface documents of my colleagues, I get confused and have a lot of problems...
Combien de temps faut - il pour obtenir un certificat PMP?
ECCV 2022 | Tencent Youtu proposed disco: the effect of saving small models in self supervised learning
QT addition calculator (simple case)
What is the difference between port mapping and port forwarding
华泰证券低佣金的开户链接安全吗?
Basic points of the game setup of the points mall
MIT-6.824-lab4B-2022(万字思路讲解-代码构建)
Meet ThreadPoolExecutor
[crawler] XPath for data extraction
如何报考PMP项目管理认证考试?