当前位置:网站首页>激光slam学习记录
激光slam学习记录
2022-07-05 23:31:00 【诺有缸的高飞鸟】
写在前面
1、本文内容
激光slam学习及问题记录
2、平台
ubuntu 1804, ros
3、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/125271212
资料
源码
loam
https://github.com/HKUST-Aerial-Robotics/A-LOAM
lego_loam
https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
livox_loam
https://github.com/hku-mars/loam_livox
ekf_loam
https://github.com/ITVRoC/ekf_loam
代表性激光SLAM算法论文与开源代码总结
https://zhuanlan.zhihu.com/p/424638140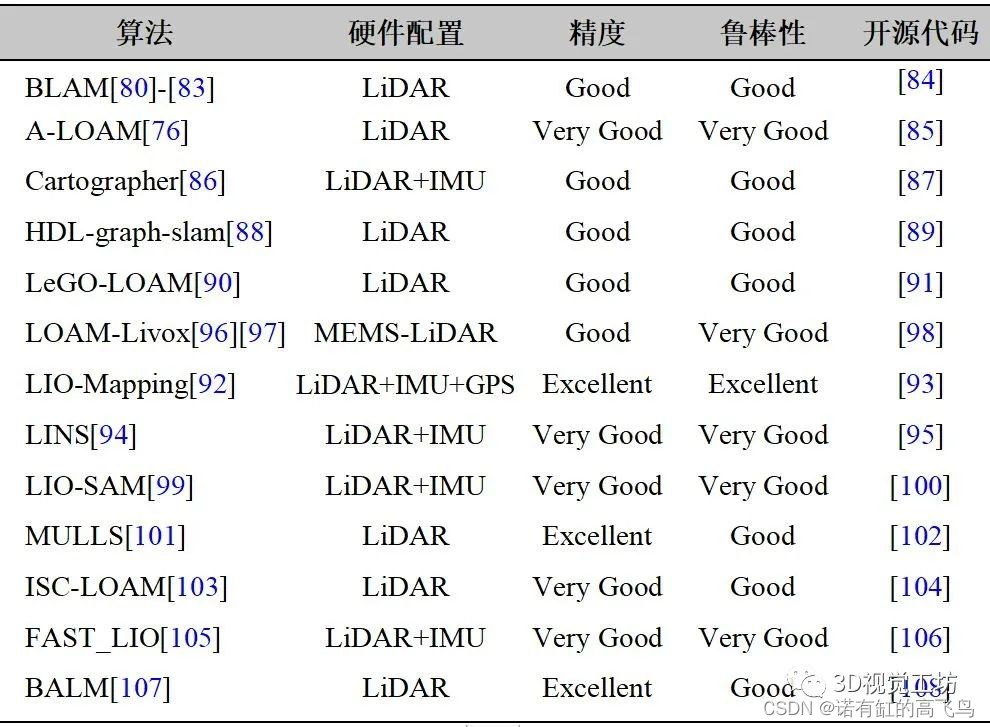
2021 SLAM会议论文汇总
https://zhuanlan.zhihu.com/p/439932294
loam:
十二.激光SLAM框架学习之livox-loam框架安装和跑数据集https://zhuanlan.zhihu.com/p/432520314
十八.多个SLAM框架(A-LOAM、Lego-loam、LIO-SAM、livox-loam)室外测试效果粗略对比分析https://zhuanlan.zhihu.com/p/441386977
多传感器融合SLAM、导航研究和学习 https://www.zhihu.com/column/c_1372631607124353024
orb-slam和orb-slam2
http://webdiis.unizar.es/~raulmur/orbslam/
SLAM算法工程师之路:A-LOAM论文研读与框架算法学习 https://zhuanlan.zhihu.com/p/431082432
考虑到各框架里的算法原理深度、模块架构、上手调试难度等情况,笔者认为最适合基础学习与记录的算法是A-LOAM。在学习并对A-LOAM有一个较好的掌握之后,再回头研究其他的框架比较合适(这里给出一个建议学习顺序:A-LOAM-> LOAM -> LEGO-LOAM -> LIO-SAM-> LVI-SAM)。A-LOAM是由Ji Zhang博士在论文《Lidar Odometry and Mapping in Real-time》[1]中提出的,使用激光雷达高效完成自身在空间的定位与三维建图。
vscode下调试ROS项目,节点调试,多节点调试,roslauch调试
https://zhuanlan.zhihu.com/p/364972107
【ROS】 在VScode中 ROS Debug 配置方法非常详细版 https://blog.csdn.net/qq_39537898/article/details/124904363
vscode利用cmake调试 https://blog.csdn.net/code_segment/article/details/81151443
卡尔曼滤波
FAST-LIO论文知识补充—卡尔曼滤波 https://zhuanlan.zhihu.com/p/485454339
详解卡尔曼滤波原理 https://blog.csdn.net/u010720661/article/details/63253509
问题
livox_loam
运行基于MID-40雷达的LOAM_LIVOX算法的全过程 https://blog.csdn.net/weixin_48083022/article/details/119043406
需要pcl1.9以上版本
https://blog.csdn.net/weixin_48083022/article/details/119043406
Ubuntu18.04安装PCL(详细教程) https://www.guyuehome.com/10039
Ubuntu18.04安装PCL 1.9.1(图文详解,附踩坑和测试) https://blog.csdn.net/qq_42257666/article/details/124574029
编译pcl时遇到问题:
/usr/lib/x86_64-linux-gnu/libSM.so:对‘[email protected]_1.0’未定义的引用
解决:
把anaconda3/lib里面的libuuid.xxx文件先移动到其他地方
https://www.codeleading.com/article/14915214739/
https://www.jianshu.com/p/459d4242b3d0
参考
文中已列出
完
如有错漏,敬请指正
边栏推荐
猜你喜欢
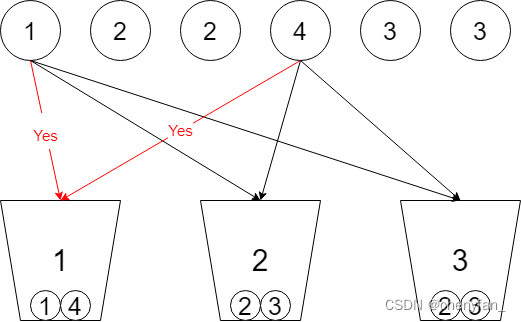
698. 划分为k个相等的子集 ●●
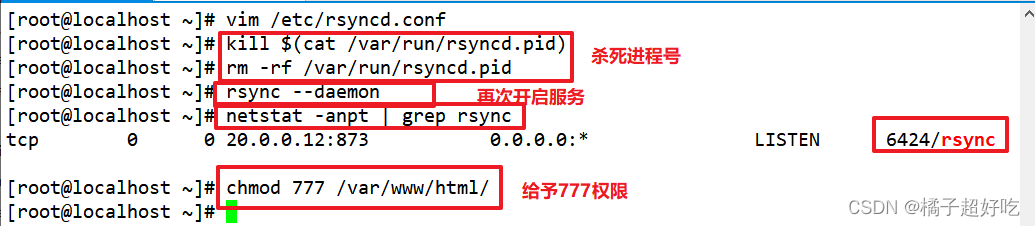
rsync远程同步
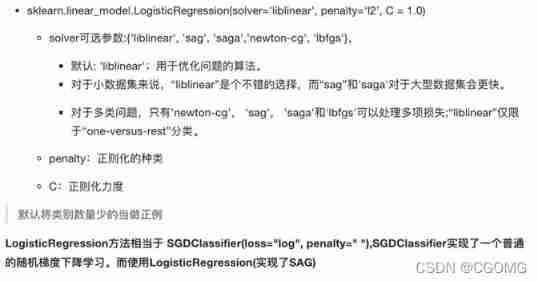
5. Logistic regression

21.PWM应用编程
3: Chapter 1: understanding JVM specification 2: JVM specification, introduction;
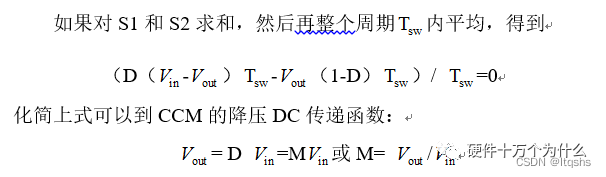
开关电源Buck电路CCM及DCM工作模式
Initial experience | purchase and activate typora software

20.移植Freetype字体库

Research notes I software engineering and calculation volume II (Chapter 1-7)
98. Verify the binary search tree ●●
随机推荐
如何提升口才
VS2010编写动态链接库DLL和单元测试,转让DLL测试的正确性
698. Divided into k equal subsets ●●
LeetCode——Add Binary
20. Migrate freetype font library
[classical control theory] summary of automatic control experiment
(4)UART應用設計及仿真驗證2 —— TX模塊設計(無狀態機)
【原创】程序员团队管理的核心是什么?
20220703 周赛:知道秘密的人数-动规(题解)
Qcombox (rewrite) + qcompleter (auto completion, auto loading the drop-down options of qcombox, setting the background color)
STM32__06—单通道ADC
【经典控制理论】自控实验总结
帶外和帶內的區別
【LeetCode】5. Valid palindrome
(4) UART application design and simulation verification 2 - RX module design (stateless machine)
Dynamic planning: robbing families and houses
Initial experience | purchase and activate typora software
It is proved that POJ 1014 module is optimized and pruned, and some recursion is wrong
CIS benchmark tool Kube bench
98. Verify the binary search tree ●●