当前位置:网站首页>What parameters need to be reconfigured to replace the new radar of ROS robot
What parameters need to be reconfigured to replace the new radar of ROS robot
2022-07-07 13:31:00 【Plum fruit tea】
1. background
Self developed chassis - indoor ROS The robot needs to be replaced 2D Laser radar , In the whole system ( signal communication 、 Drawing 、 location 、 Navigation ) What parameters need to be reconfigured ?
2. Communicate with the lower computer
1、 First of all, we need to know the radar IP, Modify the interface of industrial computer IP And laser radar IP For the same segment .
2、 Inform the next machine (STM32) modify IP, Reason for modification : The data transmission mode of chassis upper computer and lower computer is Socket; otherwise , Unable to receive the message sent by the lower computer odom data .
3、 LAN built by router , Router ip It also needs to be modified ( Set the master-slave machine ).
Be careful : You can also modify the radar ip, So the next machine 、 Routers and industrial computers ip You don't have to change it .
3. Carto Drawing part
1、 Confirm the installation position of lidar , Modify the urdf file (r,p,y,x,y,z).
4. Navigation The navigation part
1、Navigation Navigation startup file launch Revision in China base_link To laser Of TF Transformation , Modify the installation position coordinates of the radar .( For positioning part amcl, Need to reconfigure ; If use Carto location , There is no need to configure , The mapping part has been configured )
5. Radar ROS Drive pack
1、 Confirm lidar ROS The topic name in the driver package 、rame_id Is it consistent with the parameters set in the map building navigation .
边栏推荐
猜你喜欢


随机推荐
JS determines whether an object is empty
Introduction and basic use of stored procedures
我那“不好惹”的00后下属:不差钱,怼领导,抵制加班
[untitled]
[dark horse morning post] Huawei refutes rumors about "military master" Chen Chunhua; Hengchi 5 has a pre-sale price of 179000 yuan; Jay Chou's new album MV has played more than 100 million in 3 hours
记一次 .NET 某新能源系统 线程疯涨 分析
Esp32 series column
C语言数组相关问题深度理解
Scripy tutorial classic practice [New Concept English]
Simple and easy-to-use code specification
存储过程的介绍与基本使用
Thread pool reject policy best practices
Test next summary
Ogre introduction
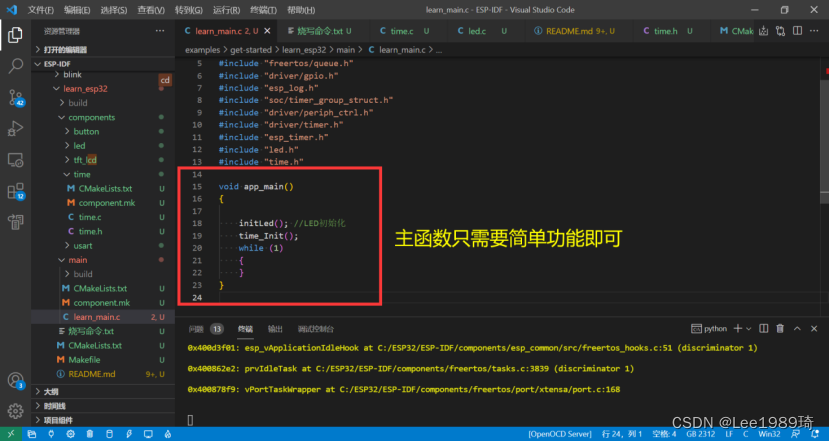
单片机学习笔记之点亮led 灯
clion mingw64中文乱码
High end for 8 years, how is Yadi now?
flask session伪造之hctf admin
Error lnk2019: unresolved external symbol
Vscade editor esp32 header file wavy line does not jump completely solved