当前位置:网站首页>Revit secondary development - collision detection
Revit secondary development - collision detection
2022-07-07 22:22:00 【Hey, hey, hey, hey, hey】
Make a note of , It's easy to write This is the core code .
Not measured carefully , Anyway, the current detection is and rvt The self-contained collision detection results are the same .
List<ElementId> left;// Elements to detect collisions id
List<ElementId> right;// Elements to detect collisions id
string sResult="";
foreach(ElementId eid left)
{
Element elem = doc.GetElement(eid);
FilteredElementCollector collector = new FilteredElementCollector(doc,right);// Create collector , Specify the collection range
ElementIntersectsElementFilter filter = new ElementIntersectsElementFilter(elem);// use API Filter intersecting elements
List<Element> lstElem = collector.WherePasses(filter).ToElements().ToList();
if(lstElem.Count > 0)
{
foreach(Element collision_elem lstElem)
{
sInfo += elem.Name+" Id:"+elem.Id+" ----- "+collision_elem.Name+" Id:"+collision_elem.Id +"\n";
}
// Handle two sets with the same id when , Prevent duplicate detection
if(right.Contains(eid))
right.Remove(eid);
}
}
TaskDialog.Show("result",sInfo);Pure hand tap , May be wrong , You can modify or reply by yourself .
----------- to update ---------------
If you test a large model ,List<Element> lstElem = collector.WherePasses(filter).ToElements().ToList();
Running this code will be very time-consuming , The interface appears to be suspended . Want to display the detection progress through the progress bar , Make the interface better .
It won't work in this way , Because I can't get the progress of detection ( I wonder if you can get it ?)
The same problem is also encountered in online query , And give the solution :
1. use boundingboxIntersectFilter and boundingboxIsInsideFilter Quickly filter out collision elements ( These two belong to the fast filter ), But the filtered elements will be inaccurate , We want to delete the included but disjoint elements from the set .
2. use ElementIntersectsSolidFilter( Slow filter ) Confirm whether there is a real collision
List<ElementId> left;
List<ElementId> right;
List<ElementId> realEids;// Real collision id
// Record key And which elements have been detected
Dictionary<ElementId,List<ElementId>> m_dicCheck;
int iCount = 0;// Quickly filtered id total
foreach(ElementId eid left)
{// This cycle can display the overall progress of the test
// Prevent duplicate detection
List<ElementId> temp = right;
if(m_dicCheck.Count > 0)
{
foreach(ElementId id in m_dicCheck.Keys)
{
if(m_dicCheck[id].Contains(eid))
temp.Remove(id);
}
m_dicCheck.Add(eid,temp);
}
else
{
m_dicCheck.Add(eid,temp);
}
Element elem = doc.GetElement(eid);
BoundingBoxXYZ boxXYZ = elem.get_BoundingBox(doc.ActiveView);
Outline ol = new Outline(boxXYZ.Min,boxXYZ.Max);
BoundingBoxIntersectsFilter boxIntersectsFilter = new BoundingBoxIntersectsFilter(ol);
BoundingBoxIsInsideFilter boxIsInsideFilter = new BoundingBoxIsInsideFilter(ol);
LogicalOrFilter filter = new LogicalOrFilter(boxIntersectsFilter,boxIsInsideFilter);
FilteredElememntCollector collector = new FilteredElememntCollector(doc,temp);
// Use a quick filter to get all intersections / Contained elements , And remove the duplicate in the set id
List<ElementId> lstEid = collector.WherePasses(filter).ToElementIds().Distinct().ToList();
// Remove the detection element itself
lstEid = lstEid.Where(e=>e != eid).ToList();
iCount = lstEid.Count;
// Get all of the currently detected elements solid
List<Solid> lstSolid = GetElementSolid(elem);
if(lstSolid.Count == 0)
continue;
// Then it is a cycle to judge whether the collision is real
foreach(Solid solid lstSolid)
{// This loop can show the progress of individual element detection
FilteredElementCollector collisionCollector = new FilteredElementCollector(doc,lstEid);
ElementIntersectsSolidFilter collisionFilter = new ElementIntersectsSolidFilter(solid);
List<ElementId> Ids = collisionCollector.WherePasses(collisionFilter).ToElementIds().ToList();
// Release the filter and collector , Otherwise, creating too many will overflow memory
collisionCollector.Dispose();
collisionFilter.Dispose();
if(Ids.Count > 0)
{
realEids.AddRange(Ids);
if(tempEids.Count == iCount)
break;
// Will filter out id from lstEid Delete... From the collection , Narrow the detection range
foreach(ElementId itemId Ids)
{
if(lstEid.Contains(itemId)) lstEid.Remove(itemId);
}
}
}
//
// Real collision elements id ad locum realEids, Perform the operation on the result here
//
realEids.Clear();
}
obtain Element Entity of Solid
private List<Solid> GetElementSolid(Element elem)
{
List<Solid> lstSolid = new List<Solid>();
Options opt = new Option();
opt.ComputeReferences = true;
opt.IncludeNonVisbleObjects = true;
GeometryElement ge = element.get_Geomtry(opt);
if(ge != null)
lstSolid.AddRange(GetSolid(ge));
return lstSolid;
}
private List<Solid> GetSolid(GeometryElement ge)
{
List lstSolid = new List<Solid>();
foreach(GeomtryObject go in ge)
{
if(go is Solid)
{
Solid solid = go as Solid;
if(solid.SurfaceArea > 0 && solid.Volume > 0 && solid.Faces.Size > 1 && solid.Edges.Size > 1)
lstSolid.Add(solid);
}
else if(go is GeometryInstance)
{
GeomtryElement ge = (go as GeometryInstance).GetInstanceGeometry();
lstSolid.AddRange(GetSolid(ge));
}
}
return lstSolid;
}Hand tapping , Correct or reply yourself if there is an error .
边栏推荐
- Jerry's test box configuration channel [chapter]
- 如何选择合适的自动化测试工具?
- 【Azure微服务 Service Fabric 】因证书过期导致Service Fabric集群挂掉(升级无法完成,节点不可用)
- The difference between NPM uninstall and RM direct deletion
- 嵌入式开发:如何为项目选择合适的RTOS?
- Welcome to CSDN markdown editor
- Debugging and handling the problem of jamming for about 30s during SSH login
- OpenGL job coordinate system
- [advanced MySQL] index details (I): index data page structure
- Node:504 error reporting
猜你喜欢
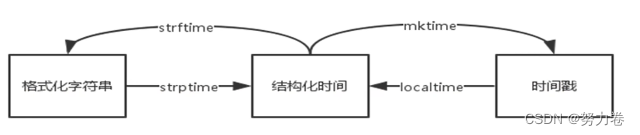
Time standard library
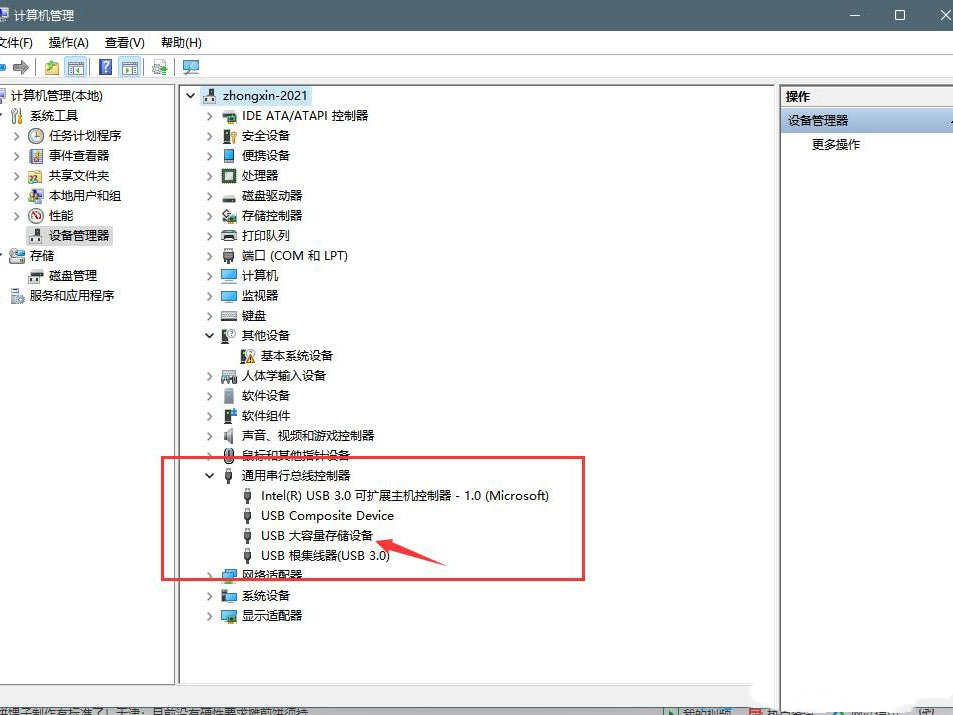
What if the win11u disk does not display? Solution to failure of win11 plug-in USB flash disk
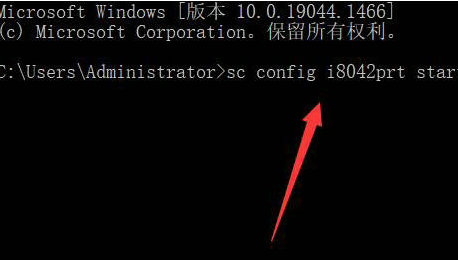
How does win11 unblock the keyboard? Method of unlocking keyboard in win11

海外代理推荐
![Jerry's manual matching method [chapter]](/img/92/74281c29565581ecb761230fbfd0f3.png)
Jerry's manual matching method [chapter]
Build your own website (18)
你可曾迷茫?曾经的测试/开发程序员,懵懂的小菜C鸟升级......
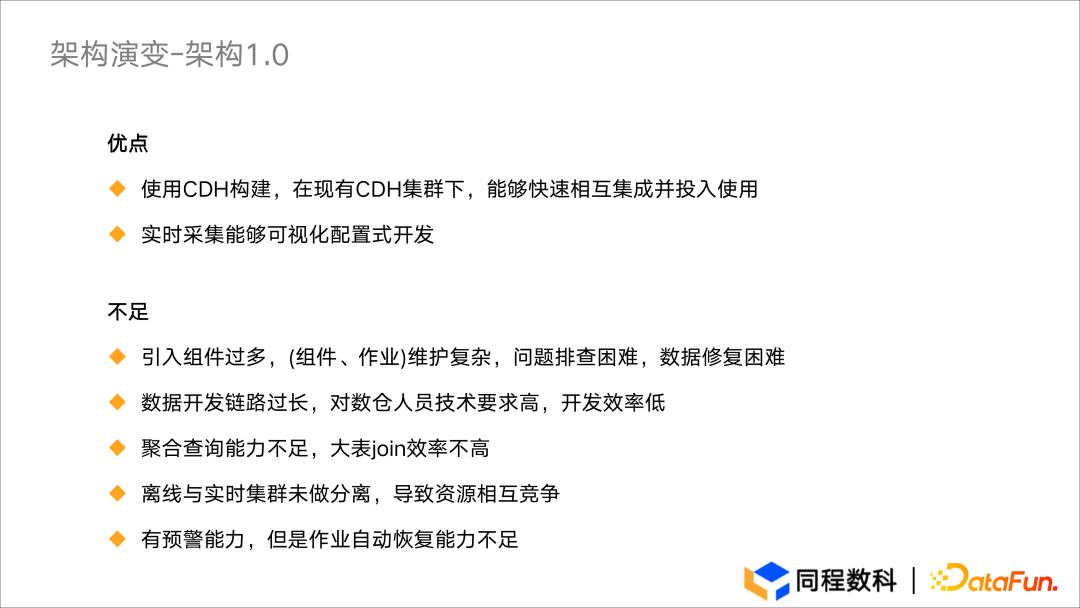
应用实践 | 数仓体系效率全面提升!同程数科基于 Apache Doris 的数据仓库建设
null == undefined
Paint basic graphics with custompaint
随机推荐
Px4 autonomous flight
How to make agile digital transformation strategy for manufacturing enterprises
Debugging and handling the problem of jamming for about 30s during SSH login
Node:504 error reporting
Jerry's test box configuration channel [chapter]
Kaggle-Titanic
Ternary expressions, generative expressions, anonymous functions
Solve the problem of uni in uni app Request sent a post request without response.
How does win11 time display the day of the week? How does win11 display the day of the week today?
[interview arrangement] 0211 game engine server
客户案例|华律网,通过观测云大幅缩短故障定位时间
Google SEO external chain backlinks research tool recommendation
Overseas agent recommendation
Matplotlib drawing interface settings
Customer case | China law network, through observing the cloud, greatly shortens the time of fault location
【Azure微服务 Service Fabric 】在SF节点中开启Performance Monitor及设置抓取进程的方式
谈谈制造企业如何制定敏捷的数字化转型策略
Have you ever been confused? Once a test / development programmer, ignorant gadget C bird upgrade
. Net automapper use
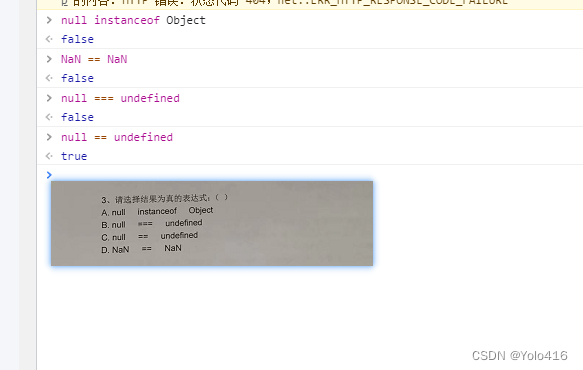
What is the difference between the three values of null Nan undefined in JS