当前位置:网站首页>并查集理论讲解和代码实现
并查集理论讲解和代码实现
2022-07-05 07:18:00 【BugMaker-shen】
一、概念
并查集是一种树形的数据结构,主要用于解决一些元素分组的问题。用于处理一些不相交集合的合并以及查询问题
并查集的思想是用一个数组表示了整片森林,树的根节点唯一标识了一个集合,我们只要找到了某个元素的树根,就能确定它在哪个集合里
二、并查集构建过程
我们先讲解一下并查集的构建过程
父 子
1 3
1 2
5 4
2 4
6 8
8 7
我们假设以上节点两两在一个集合中,左边为父节点,右边为子节点
对于前面四组数据,我们构造出如下的结构
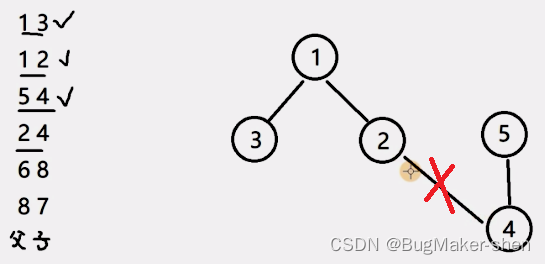
这出现了问题,根据第4组数据构造集合时,应该把4所在树的根节点与2所在树的根节点相连,正确的集合构造如下:
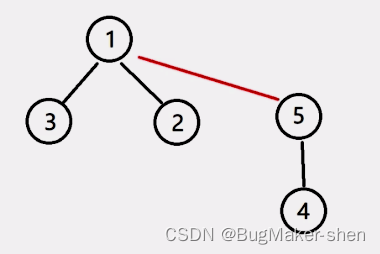
构造并查集过程中,并不是简单的把两个节点相连,而是把节点所在的树的根节点相连
判断两个节点是否在一个集合中,判断这俩节点所在树的根节点是否相同即可
我们接着构造后两组数据的集合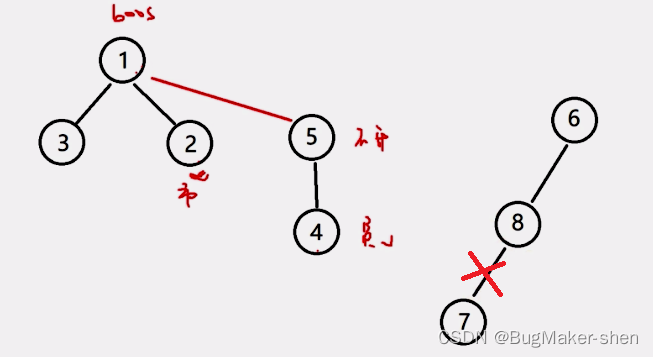
上面这种直接把7放在8下面的做法是错误的,我们刚刚说了,合并两个集合是把两个树的树根节点进行合并。7单独成一棵树的根节点,和6进行合并,正确合并如下:
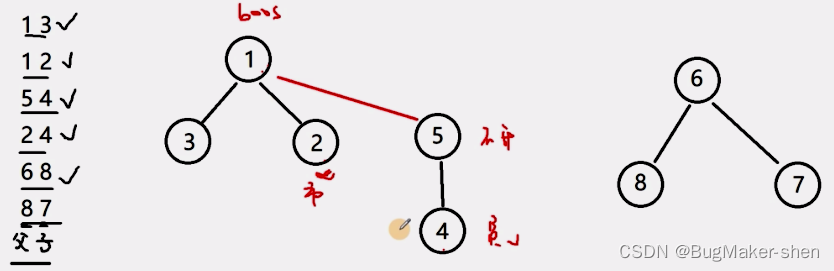
我们通过以上的构造过程,有如下总结:
- 构造并查集过程中,并不是简单的把两个节点相连,而是把节点所在的树的根节点进行相连(不关心根节点的父子关系)
- 判断两个节点是否在一个集合中,判断这俩节点所在树的根节点是否相同即可
三、代码实现
代码上实现时,无论是合并还是查询,都要找节点所在树的根节点,故需要记录父节点
主要思想:每一个节点对应的数组元素位置,存储它父节点的编号即可
怎么初始化?
由于我们说每个独立节点所在树的根节点就是自己,于是我们用它自己的节点编号进行初始化
什么时候找到树根了?
当x = arr[x]相等时,表示自己的父节点是自己,则表示树根是自己
并查集初始化如下:

我们构造的森林用并查集表示如下
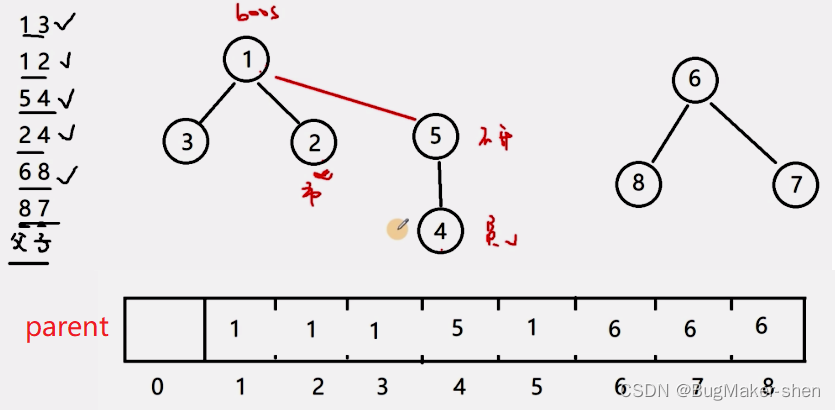
遍历数组,通过比较元素值和下标是否相同即可得到并查集中有几个树根。从图中也可以看到,节点1和6就是树根了
#include <iostream>
using namespace std;
const int SIZE = 9;
int parent[SIZE];
// 返回x所在树的根节点的编号
int find_root(int x) {
if (x <= 0 || x >= SIZE) {
return -1;
}
while (x != parent[x]) {
x = parent[x];
}
return x;
}
// 递归版本的查询
int cur_find_root(int x) {
if (x <= 0 || x >= SIZE) {
return -1;
}
if (x == parent[x]) {
return x;
}
else {
return cur_find_root(parent[x]);
}
}
// 合并x和y所在的集合
void merge(int x, int y) {
x = find_root(x);
y = find_root(y);
if (x != y) {
// x和y在一个集合中则不需要合并,不在一个集合则需要合并
parent[y] = x;
// parent[x] = y;
}
}
int main() {
for (int i = 0; i < SIZE; i++) {
parent[i] = i;
}
int x, y;
for (int i = 0; i < 6; i++) {
cin >> x >> y;
merge(x, y);
}
cout<<(find_root(2) == find_root(8) ? "YES" : "NO")<<endl;
return 0;
}
边栏推荐
猜你喜欢
并发编程 — 死锁排查及处理

Word import literature -mendeley

Intelligent target detection 59 -- detailed explanation of pytoch focal loss and its implementation in yolov4
Do you choose pandas or SQL for the top 1 of data analysis in your mind?
Ros2 - configuration development environment (V)
docker安装mysql并使用navicat连接
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
2022年PMP项目管理考试敏捷知识点(7)
Delayqueue usage and scenarios of delay queue
三体目标管理笔记
随机推荐
PowerManagerService(一)— 初始化
【Node】npm、yarn、pnpm 区别
Use of Pai platform
What if the DataGrid cannot see the table after connecting to the database
[framework] multi learner
【软件测试】03 -- 软件测试概述
Application of MATLAB in Linear Algebra (4): similar matrix and quadratic form
mingling
并发编程 — 如何中断/停止一个运行中的线程?
ROS2——配置开发环境(五)
Ros2 - common command line (IV)
Mathematical analysis_ Notes_ Chapter 8: multiple integral
Mipi interface, DVP interface and CSI interface of camera
Powermanagerservice (I) - initialization
Anaconda navigator click open no response, can not start error prompt attributeerror: 'STR' object has no attribute 'get‘
What does soda ash do?
The difference between new and malloc
Initialization of global and static variables
全局变量和静态变量的初始化
[node] NVM version management tool