当前位置:网站首页>Svgo v3.9.0+
Svgo v3.9.0+
2022-07-05 09:09:00 【Flying bear blablabla】
This project provides svg Compression processing optimization function . be based on svgo Realization .
npm run svgo
Many of us download or Sketch Derived svg There will be a lot of redundant and useless information , Greatly increased svg The size of the , We can use svgo Optimize it . For example, the following figure is used Sketch One of the exported svg

We can execute npm run svgo


Useless information has been disposed of .
More detailed configuration Can be in /src/icons/svgo.yml To configure .
边栏推荐
- [daiy4] copy of JZ35 complex linked list
- . Net service governance flow limiting middleware -fireflysoft RateLimit
- 3D reconstruction open source code summary [keep updated]
- c#比较两张图像的差异
- nodejs_ 01_ fs. readFile
- Rebuild my 3D world [open source] [serialization-2]
- 编辑器-vi、vim的使用
- Driver's license physical examination hospital (114-2 hang up the corresponding hospital driver physical examination)
- Confusing basic concepts member variables local variables global variables
- 2011-11-21 training record personal training (III)
猜你喜欢
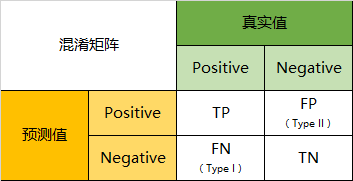
Confusion matrix
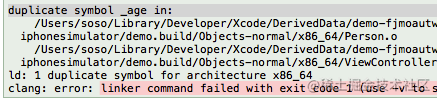
Confusing basic concepts member variables local variables global variables
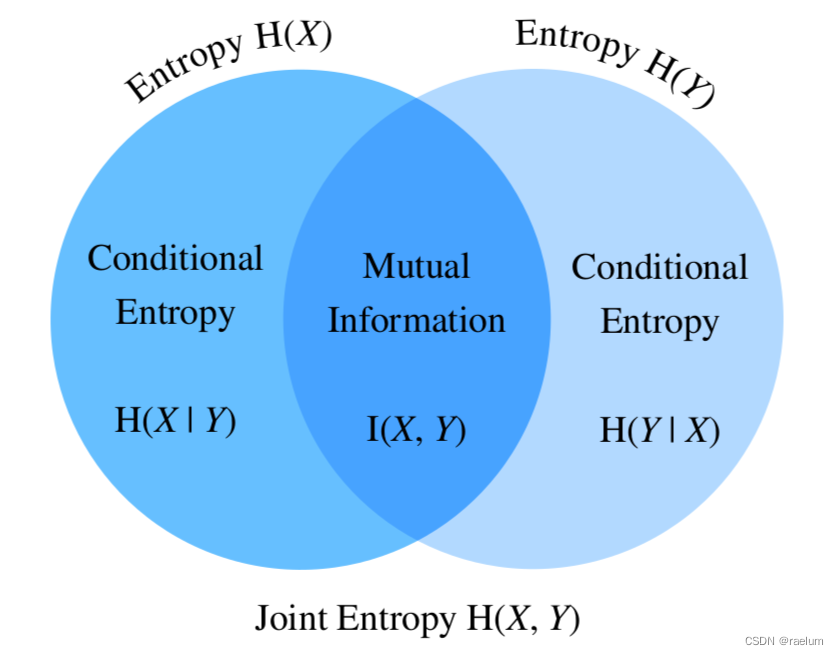
信息与熵,你想知道的都在这里了
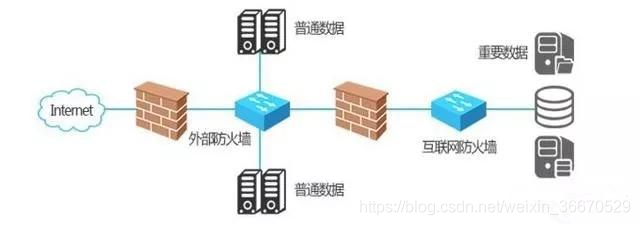
什么是防火墙?防火墙基础知识讲解
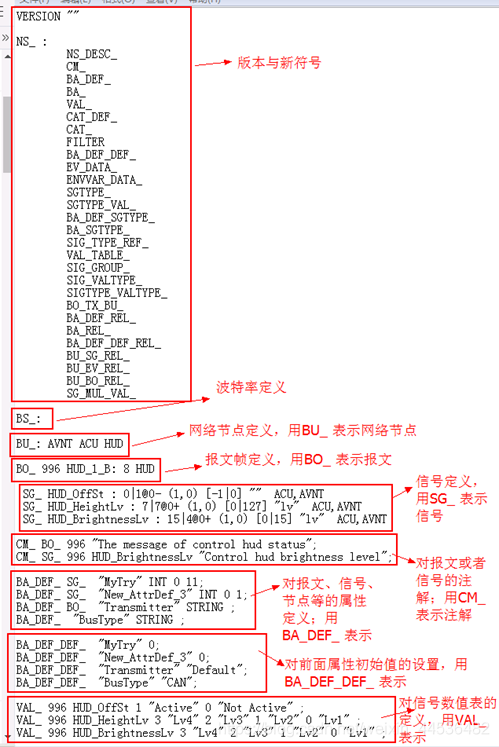
AUTOSAR从入门到精通100讲(103)-dbc文件的格式以及创建详解
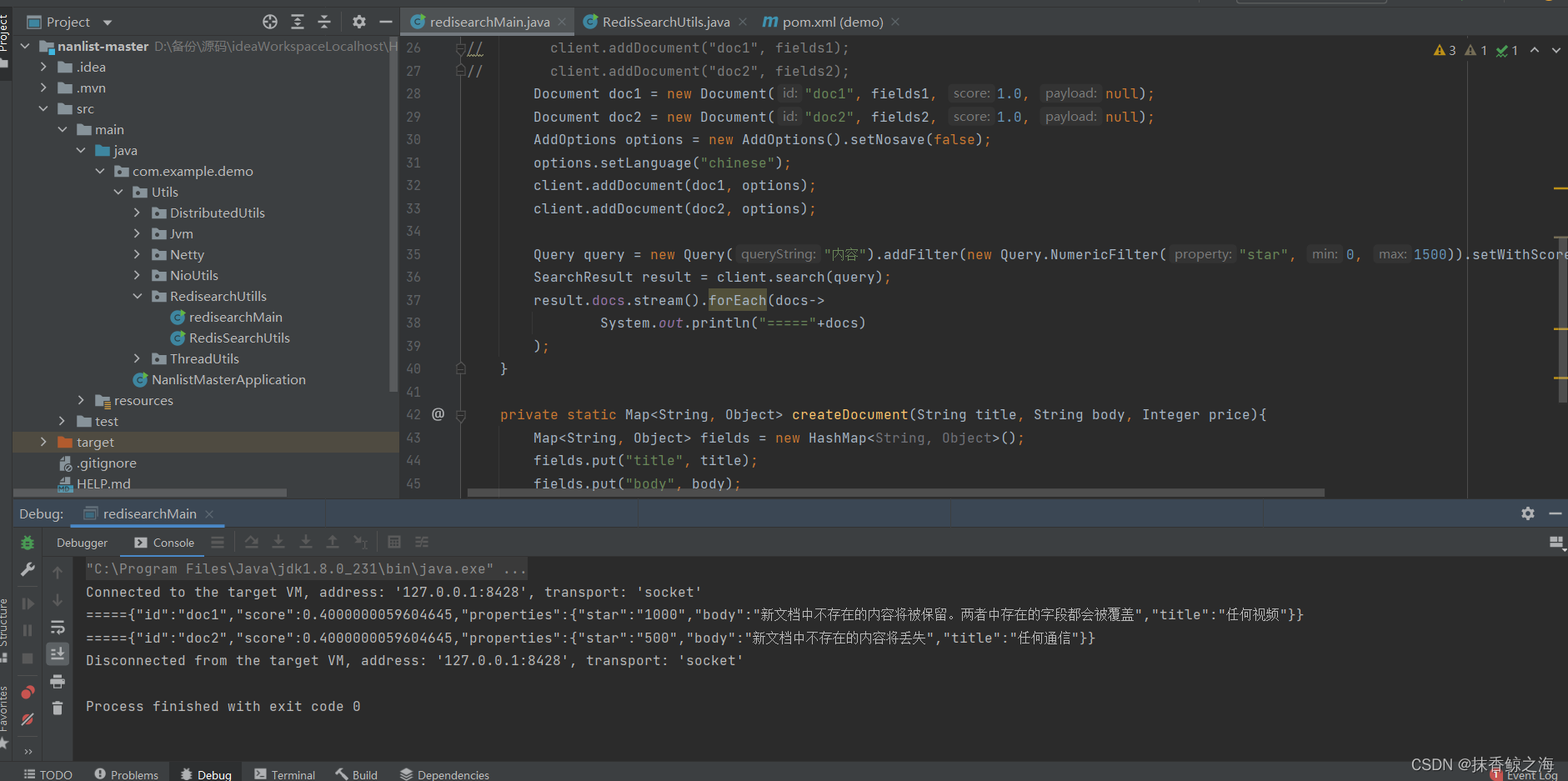
Redis implements a high-performance full-text search engine -- redisearch
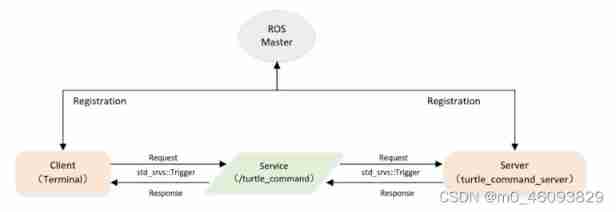
Programming implementation of ROS learning 6 -service node
Ros-11 common visualization tools
The combination of deep learning model and wet experiment is expected to be used for metabolic flux analysis
Install the CPU version of tensorflow+cuda+cudnn (ultra detailed)
随机推荐
What is a firewall? Explanation of basic knowledge of firewall
Add discount recharge and discount shadow ticket plug-ins to the resource realization applet
Use arm neon operation to improve memory copy speed
交通运输部、教育部:广泛开展水上交通安全宣传和防溺水安全提醒
C#图像差异对比:图像相减(指针法、高速)
12. Dynamic link library, DLL
Information and entropy, all you want to know is here
Redis implements a high-performance full-text search engine -- redisearch
Multiple linear regression (sklearn method)
np. allclose
C # draw Bezier curve with control points for lattice images and vector graphics
Ministry of transport and Ministry of Education: widely carry out water traffic safety publicity and drowning prevention safety reminders
Programming implementation of subscriber node of ROS learning 3 subscriber
Alibaba cloud sends SMS verification code
Ros-10 roslaunch summary
It cold knowledge (updating ing~)
TF coordinate transformation of common components of ros-9 ROS
驾驶证体检医院(114---2 挂对应的医院司机体检)
信息与熵,你想知道的都在这里了
Applet (use of NPM package)