当前位置:网站首页>3D reconstruction open source code summary [keep updated]
3D reconstruction open source code summary [keep updated]
2022-07-05 08:55:00 【Li Yingsong~】
3D reconstruction open source code summary , Irregular update .
Synchronize to Github Warehouse :https://github.com/ethan-li-coding/Source-Codes-3DVison
List of articles
SFM
Openmvg【3.5k stars】【Mozilla Public License Version 2.0】【https://github.com/openMVG/openMVG】
A multi view geometry 3D reconstruction algorithm library , Recover the three-dimensional pose of the camera from the disordered two-dimensional image set .SFM(Structure From Motion) Classic algorithm library .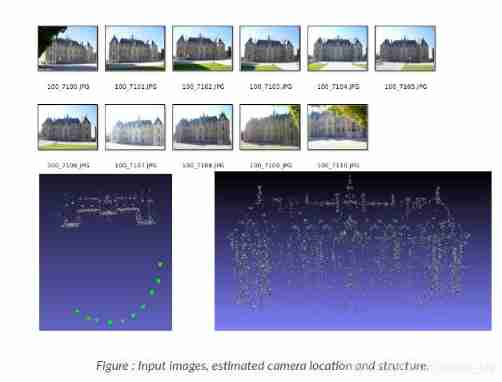
Colmap【3k stars】【new BSD license】【https://github.com/colmap/colmap】
A multi view geometry 3D reconstruction algorithm library , Recover the three-dimensional pose of the camera from the disordered two-dimensional image set (SFM) And multi view stereo reconstruction (MVS).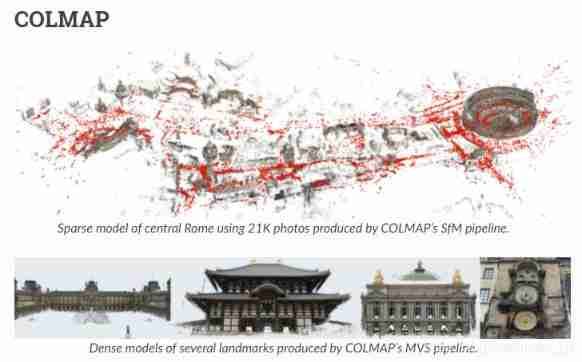
AliceVision【1.8k stars】【MPL2 license】【https://github.com/alicevision/AliceVision】
An open source photogrammetry system framework .
TheiaSfM【600+k stars】【New BSD license】【https://github.com/sweeneychris/TheiaSfM】
Google launched open source SFM Algorithm library .
MVE【700+k stars】【BSD 3-Clause License】【https://github.com/simonfuhrmann/mve】
OpenSfM【2.2k stars】【BSD license】【https://github.com/mapillary/OpenSfM】
One use Python Realized SFM Algorithm library .
MVS
- openmvs【1.6k stars】【AGPLv3】【https://github.com/cdcseacave/openMVS】
An open source algorithm library for multi view stereo reconstruction , Based on image set with pose information , Reconstruct a high-quality texture model , The effect is excellent .
- meshroom【6.5k stars】【MPL2 license】【https://github.com/alicevision/meshroom】
and OpenMVS Like the library , It is also based on image sets with pose information , Reconstruct a high-quality texture model , But it didn't work OpenMVS good , Faster . With graphic interface , Well done .
SLAM
VSLAM
- orb-slam2【6.2k stars】【GPLv3 license】【https://github.com/raulmur/ORB_SLAM2】
Very classic Monocular / Binocular /RGBD-slam Algorithm library - orb-slam3【2.5k stars】【GPLv3 license】【https://github.com/UZ-SLAMLab/ORB_SLAM3】
The first one can use monocular 、 Stereoscopic and RGB-D The camera , Use pinhole and fisheye lens models for vision 、 Visual inertia and multiple maps SLAM The system of .Monocular slam
- orb-slam【1.1k stars】【GPLv3 license】【https://github.com/raulmur/ORB_SLAM】
Very classic monocular slam Algorithm library
RGBD slam
KinectFusion【280+ stars】【MIT License】【https://github.com/chrdiller/KinectFusionLib】
be based on KinectFusion This paper implements an open source algorithm ,paper:KinectFusion: Real-time dense surface mapping and trackingInfiniTAM∞ v3【680+ stars】【Oxford University Innovation Academic License】【https://github.com/victorprad/InfiniTAM】
The open source multi platform real-time large-scale deep integration and tracking done by the Oxford University team , fast , stay Windows、Linux、Ios、Android Can be compiled and run , And the speed is ok .
VoxelHashing【460+ stars】【Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License】【https://github.com/niessner/VoxelHashing】
be based on TSDF Classic depth fusion algorithm of voxel fusion , Yes CUDA edition , fast .ElasticFusion【1.3k stars】【non-commercial use only】【https://github.com/mp3guy/ElasticFusion】
One for the RGBD The data is based on Surfel Of Fusion Algorithm . Suitable for indoor reconstruction .
ElasticReconstruction【480+ stars】【MIT license】【https://github.com/qianyizh/ElasticReconstruction】
One for the RGBD The data is based on Voxel Of Fusion Algorithm . Suitable for indoor reconstruction .
BundleFusion【1k stars】【non-commercial applications】【https://github.com/niessner/BundleFusion】
A real-time and globally consistent 3D reconstruction algorithm library , be based on TSDF, The effect is now Fusion The best of all .
badslam【400+ stars】【BSD-3-Clause License】【CVPR2019】【https://github.com/ETH3D/badslam】
One is based on RGBD Real time direct method of data BA-SLAM Algorithm , Suitable for outdoor reconstruction , From the Federal Institute of technology in Zurich (ETH) The team .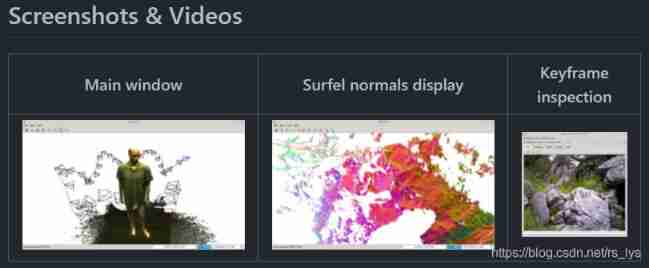
tsdf-fusion 【400+ stars】 【BSD-2-Clause License】【https://github.com/andyzeng/tsdf-fusion】
One fuses multiple registered depth maps into TSDF Voxel Algorithm ,TSDF Voxels can be used for Marching Cubes Grid construction
- orb-slam【1.1k stars】【GPLv3 license】【https://github.com/raulmur/ORB_SLAM】
Feature matching
- CudaSift【570+ stars】【non-commercial】【https://github.com/Celebrandil/CudaSift】
One CUDA Fast implementation SIFT Algorithm ,SIFT It is a classic scale invariant feature matching algorithm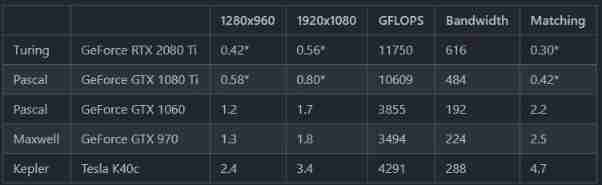
Stereo matching
- SemiglobalMatching(SGM)【400+ stars】【MIT License】【https://github.com/ethan-li-coding/SemiGlobalMatching】
Classic semi global stereo matching algorithm SGM Algorithm library . High efficiency and strong adaptability .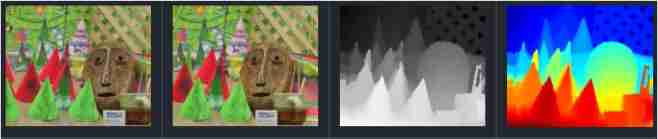
- PatchMatchStereo【250+ stars】【MIT License】【https://github.com/ethan-li-coding/PatchMatchStereo】
Classic inclined plane stereo matching algorithm library PatchMatch. It works great !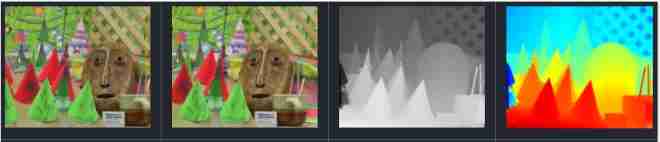
-AD-Cense 【160+ stars】【MIT License】【https://github.com/ethan-li-coding/AD-Census】
classic AD-Census Stereo matching algorithm , Efficient , The effect is good .Intel RealSense D400 Stereo Modular algorithm .
-MC-CNN【600+ stars】【BSD-2-Clause License】【https://github.com/jzbontar/mc-cnn】
The classic work of deep learning stereo matching algorithm .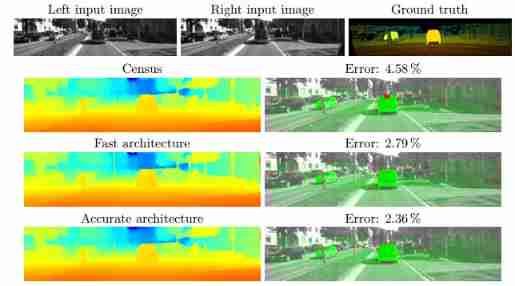
Point cloud splicing
- ICPCUDA【400+ stars】【No License】【https://github.com/mp3guy/ICPCUDA】
A depth map based data (DepthMap) Fast ICP Splice Library (CUDA Speed up ), about VGA Size (640x480), stay NVIDIA GeForce GTX TITAN X Up to 750Hz The speed of . The author also opened source KinectFusion. - CUDA-ScanMatcher-ICP [100+ stars] [MIT License]【 https://github.com/botforge/CUDA-ScanMatcher-ICP】
One is based on CUDA Of ICP Point cloud splicing algorithm , It is suitable for laser scanning point cloud and general point cloud .
- Super4PCS【300+ stars】【Apache License V2】【https://github.com/nmellado/Super4PCS】
Point cloud rough matching algorithm Super4PCS The implementation of the .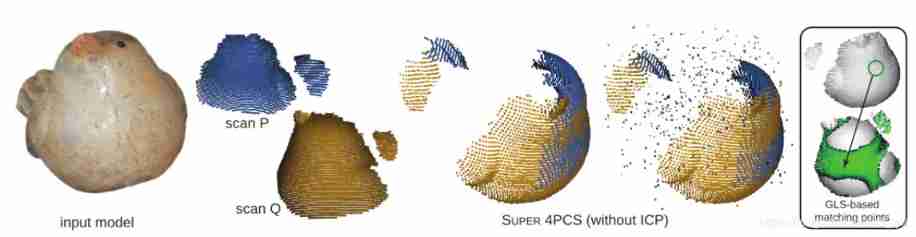
Grid construction
- PoissonRecon 【700+ stars】【MIT License】【https://github.com/mkazhdan/PoissonRecon】
Poisson reconstruction , A grid construction algorithm , The input is an unordered point cloud with normals .
Point cloud mesh processing
- pcl【6.3k stars】【BSD License】【https://github.com/PointCloudLibrary/pcl】
This is probably the most widely used point cloud processing algorithm library , You can use it to display pictures 、 Show point cloud , It also implements many point cloud processing algorithms , Such as point cloud filtering 、 Point cloud registration 、 Point cloud segmentation , Its official website is https://pointclouds.org/.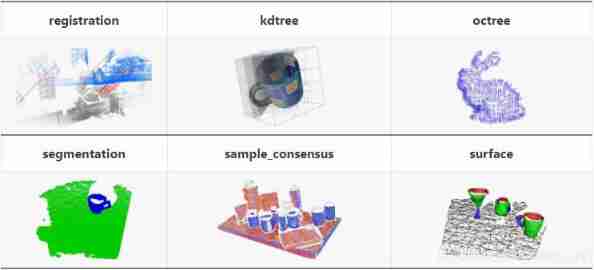
- OpenMesh【BSD 3 clause license】【https://www.graphics.rwth-aachen.de/software/openmesh/】
A very classic grid processing library , Based on half data structure , It's very efficient , And very stable , There are many implementations of basic grid algorithms .
- vcglib【560+ stars】【GPLv3.0 License】【http://vcg.isti.cnr.it/vcglib/】
and OpenMesh The same grid processing basic algorithm library , Also very efficient and stable , Well known grid processing software MeshLib Just use it .
Texture mapping
- mvs-texturing【500+ stars】【BSD 3-Clause License】【https://github.com/nmoehrle/mvs-texturing】
A texture mapping algorithm library for multi view stereo reconstruction ,OpenMVS、MVE This algorithm is used to do texture mapping .
- UVAtlas【500+ stars】【MIT License】【https://github.com/microsoft/UVAtlas】
Microsoft open source automatic UV Expansion algorithm ,UV Expansion can be used to map meshes to a two-dimensional UV On the drawing , A mesh mapped texture can be used UV Figure to organize , Improve the utilization of texture map .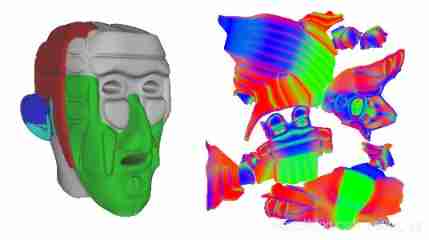
3D rendering
- potree 【2.3k stars】【FreeBSD Licnese】【https://github.com/potree/potree】
One is based on WebGL Large point cloud rendering project , It is interesting to .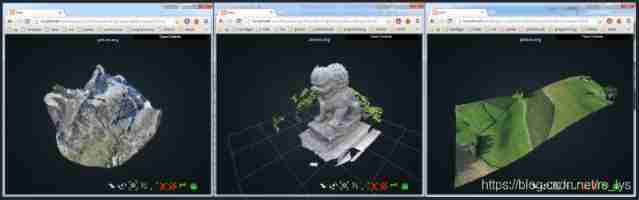
- OpenSceneGraph(OSG)【2.2k stars】【 OpenSceneGraph Public License】【https://github.com/openscenegraph/OpenSceneGraph】
A very mature and easy-to-use cross platform 3D data rendering Library , Rendering includes point clouds 、 grid 、 3D data including texture model , Suitable for large-scale software as a rendering engine , It can also be handled LOD data .
- Pangolin【1.3k stars】【MIT License】【https://github.com/stevenlovegrove/Pangolin】
A lightweight cross platform 3D rendering Library , Can be used for slam Rendering engine for related projects .
边栏推荐
- [Niuke brush questions day4] jz55 depth of binary tree
- Solution to the problem of the 10th Programming Competition (synchronized competition) of Harbin University of technology "Colin Minglun Cup"
- Adaboost使用
- Causes and appropriate analysis of possible errors in seq2seq code of "hands on learning in depth"
- [formation quotidienne - Tencent Selection 50] 557. Inverser le mot III dans la chaîne
- golang 基础 —— golang 向 mysql 插入的时间数据和本地时间不一致
- Introduction Guide to stereo vision (1): coordinate system and camera parameters
- Array,Date,String 对象方法
- [牛客网刷题 Day4] JZ55 二叉树的深度
- EA introduction notes
猜你喜欢
![[matlab] matlab reads and writes Excel](/img/80/78e4c7fcd27473526e480d4b930e2c.jpg)
[matlab] matlab reads and writes Excel
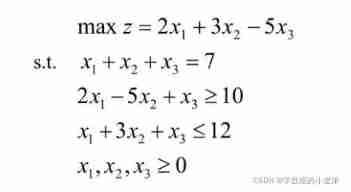
Digital analog 1: linear programming
My university

Halcon color recognition_ fuses. hdev:classify fuses by color

Guess riddles (8)
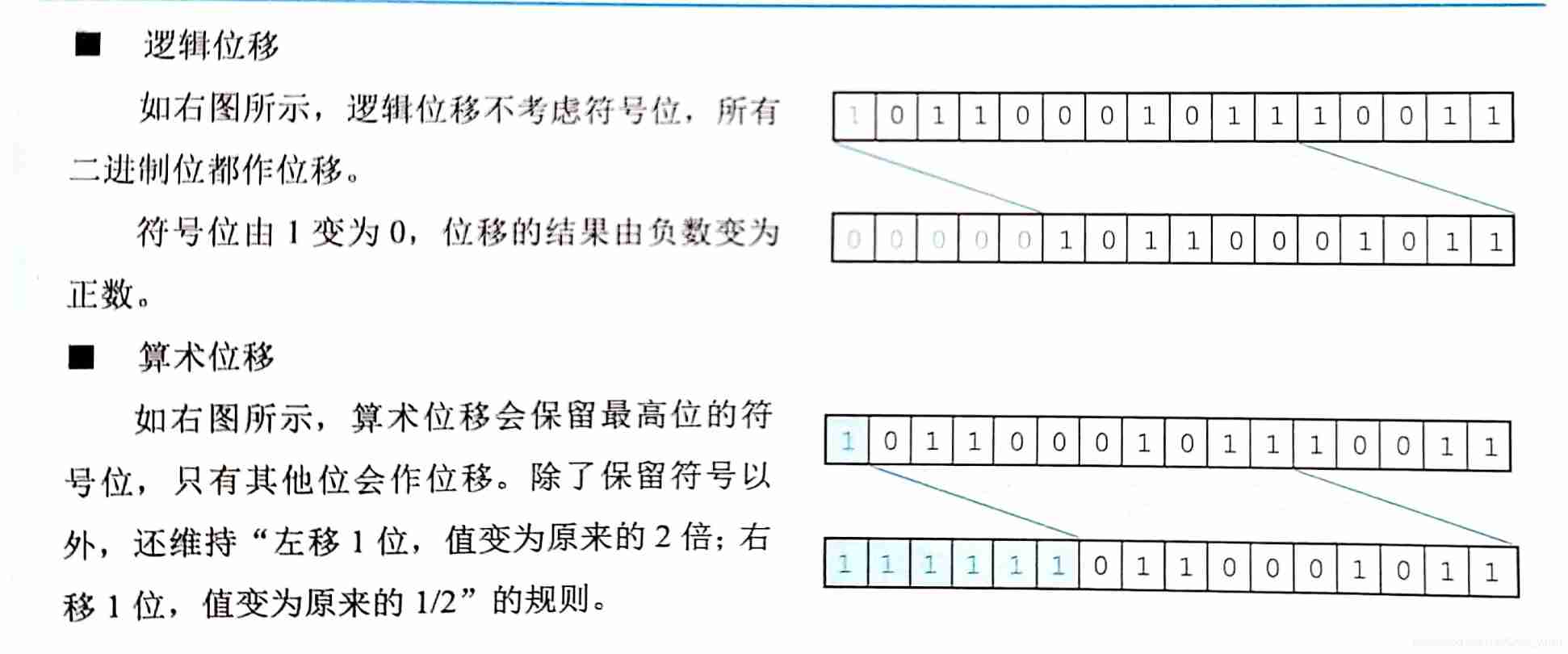
Shift operation of complement

RT thread kernel quick start, kernel implementation and application development learning with notes
RT-Thread内核快速入门,内核实现与应用开发学习随笔记
Codeworks round 639 (Div. 2) cute new problem solution
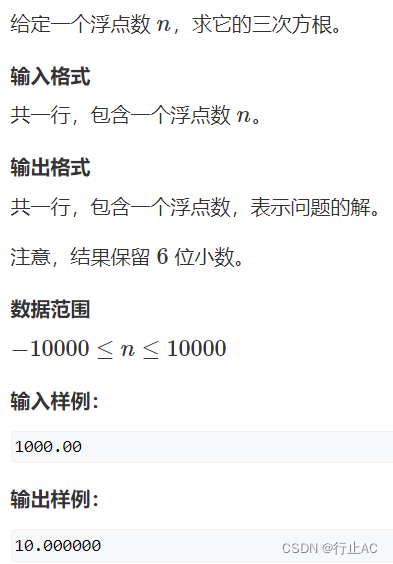
牛顿迭代法(解非线性方程)
随机推荐
Shift operation of complement
2020 "Lenovo Cup" National College programming online Invitational Competition and the third Shanghai University of technology programming competition
12、动态链接库,dll
C [essential skills] use of configurationmanager class (use of file app.config)
Summary of "reversal" problem in challenge Programming Competition
Configuration and startup of kubedm series-02-kubelet
Latex improve
Mathematical modeling: factor analysis
Ecmascript6 introduction and environment construction
Programming implementation of ROS learning 2 publisher node
优先级队列(堆)
kubeadm系列-01-preflight究竟有多少check
Business modeling of software model | overview
C#图像差异对比:图像相减(指针法、高速)
LLVM之父Chris Lattner:为什么我们要重建AI基础设施软件
Guess riddles (7)
RT-Thread内核快速入门,内核实现与应用开发学习随笔记
Halcon snap, get the area and position of coins
Codeworks round 681 (Div. 2) supplement
Programming implementation of subscriber node of ROS learning 3 subscriber