当前位置:网站首页>ROS学习_基础
ROS学习_基础
2022-07-06 06:43:00 【Leslie X徐】
ROS命令行工具使用
一、常用命令
- roscore :启动ros
- rosrun :
rosrun [package_name] [node_name]调用节点 参数为功能包名和节点名称 - rosnode :
rosnode list列出当前运行的节点 - rqt_graph :可视化当前运行的节点
- rostopic :进行话题的操作
rostopic pub:发布话题消息rostopic type:查看消息类型
- rosservice :进行服务的操作
rosservice call:发布服务请求
- rosparam
- rosmsg :获取消息的详细信息
- rossrv
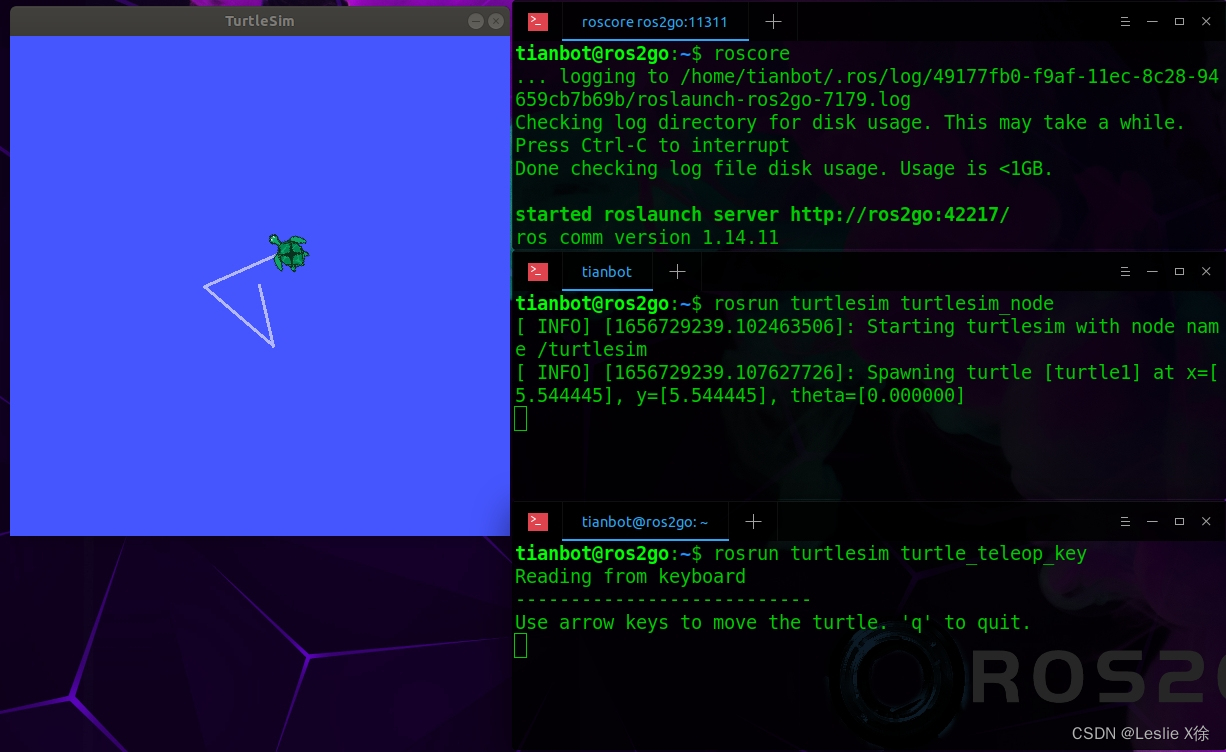
二、示例:海龟仿真
启动ROS Master:
$roscore启动海龟仿真器:
$rosrun turtlesim turtlesim_node启动海龟控制节点:
$rosrun turtlesim turtle_teleop_key
注意:这三个命令分别在三个终端执行。运行
三、发布话题消息
发布消息 让海龟一直移动。
- 先查看消息类型
~$ rostopic type /turtle1/cmd_vel
geometry_msgs/Twist
~$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
- 编写参数
~$ rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist " linear: x: 1.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0 "
注意:参数对齐
- 运行

四、发布服务请求
发布服务请求,添加新的海龟。
- 查看请求信息
~$ rosservice info /spawn
Node: /turtlesim
URI: rosrpc://ros2go:39063
Type: turtlesim/Spawn
Args: x y theta name
- 发布请求
~$ rosservice call /spawn " x: 5.0 y: 5.0 theta: 0.0 name: 'turtle2' "
name: "turtle2"
- 运行

五、话题和服务的区别
- 话题 (Topic)
- 节点间的异步通信机制
- 使用 发布/订阅 模型
- 话题数据:消息(Message) 文件格式
.msg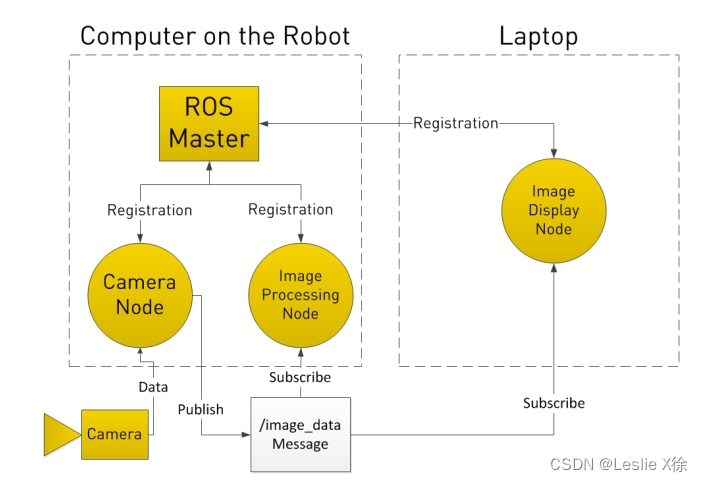
- 服务 (Service)
- 节点间的同步通信机制
- 使用 客户端/服务器(C/S) 模型
- 数据:文件格式
.srv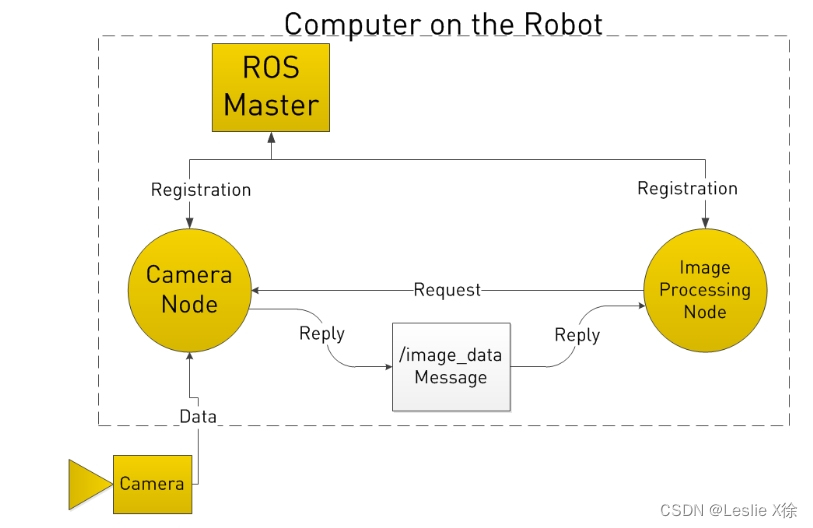
边栏推荐
- 今日夏至 Today‘s summer solstice
- SSO流程分析
- 删除外部表源数据
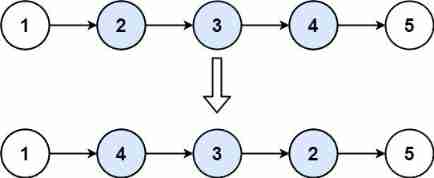
- (practice C language every day) reverse linked list II
- Pallet management in SAP SD delivery process
- What is the difference between int (1) and int (10)? Senior developers can't tell!
- [unity] how to export FBX in untiy
- Summary of leetcode's dynamic programming 4
- Day 248/300 关于毕业生如何找工作的思考
- 机器学习植物叶片识别
猜你喜欢

Biomedical localization translation services
AttributeError: Can‘t get attribute ‘SPPF‘ on <module ‘models. common‘ from ‘/home/yolov5/models/comm
SQL Server Manager studio (SSMS) installation tutorial
(practice C language every day) reverse linked list II

如何做好金融文献翻译?

Changes in the number of words in English papers translated into Chinese

Cobalt strike feature modification

AI on the cloud makes earth science research easier
SQL Server manager studio(SSMS)安装教程

My seven years with NLP
随机推荐
How effective is the Chinese-English translation of international economic and trade contracts
At the age of 26, I changed my career from finance to software testing. After four years of precipitation, I have been a 25K Test Development Engineer
SQL Server Manager studio (SSMS) installation tutorial
My daily learning records / learning methods
(practice C language every day) reverse linked list II
Biomedical localization translation services
Attributeerror: can 't get attribute' sppf 'on < module' models. Common 'from' / home / yolov5 / Models / comm
【刷题】怎么样才能正确的迎接面试?
Changes in the number of words in English papers translated into Chinese
Suspended else
CS passed (cdn+ certificate) PowerShell online detailed version
UNIPRO Gantt chart "first experience": multi scene exploration behind attention to details
ML之shap:基于adult人口普查收入二分类预测数据集(预测年收入是否超过50k)利用Shap值对XGBoost模型实现可解释性案例之详细攻略
字幕翻译中翻英一分钟多少钱?
Advanced MySQL: Basics (1-4 Lectures)
今日夏至 Today‘s summer solstice
Biomedical English contract translation, characteristics of Vocabulary Translation
如何做好金融文献翻译?
翻译生物医学说明书,英译中怎样效果佳
How much is it to translate Chinese into English for one minute?