当前位置:网站首页>Stm32f4 --- PWM output
Stm32f4 --- PWM output
2022-07-07 02:15:00 【The moon shines on the silver sea like a dragon】
STM32F4---PWM Output
PWM brief introduction
PWM Definition :
Pulse width modulation (PWM), It's English “Pulse Width Modulation” Abbreviation , Short for pulse width modulation .
PWM It is a very effective technology to control analog circuit by using digital output of microprocessor .
A little bit more simple , It's the control of pulse width ,
PWM Principle diagram 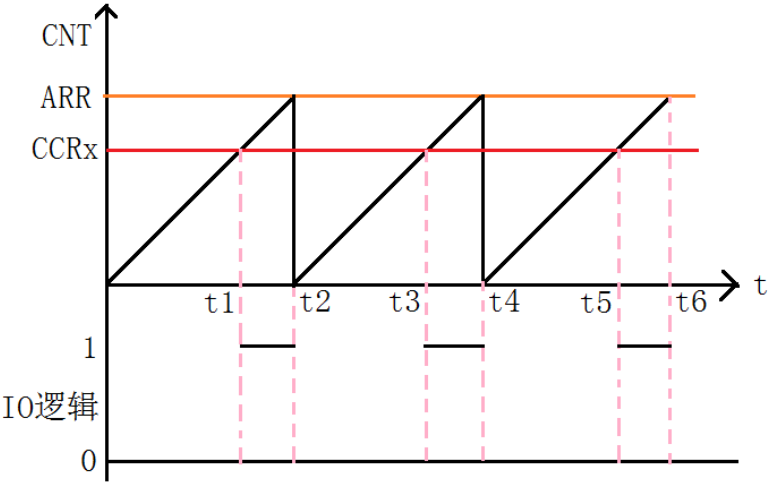
There's a PWM Schematic diagram . This picture must be well understood .
In the figure , Suppose the timer works in the up count PWM Pattern , And when CNT<CCRx when , Output 0, When CNT>=CCRx Time output 1.( Specifically, it is smaller than the output 0 still 1 You can set )
Then you can get the above PWM Sketch Map : When CNT Less than CCRx When ,IO Output low level (0), When CNT A value greater than or equal to CCRx When ,IO Output high level (1), When CNT achieve ARR When it's worth it , Back to zero , And then count up again , In turn, cycle .
change CCRx Value , You can change PWM The duty cycle of the output , change ARR Value , You can change PWM The frequency of the output , This is it. PWM The principle of output .
STM32F4 In addition to TIM6 and 7. Other timers can be used to generate PWM Output . One of the advanced timers TIM1 and TIM8 It can produce as many as 7 On the road PWM Output . And universal timers can also generate up to 4 On the road PWM Output . Here we only use TIM14 Of CH1 All the way to PWM Output .
PWM register
To make STM32F4 Universal timer TIMx produce PWM Output , use 3 A register , To control PWM Of .
These three registers are :
- Capture / Compare mode register (TIMx_CCMR1/2)
- Capture / Compare enable register (TIMx_CCER)
- Capture / Compare register (TIMx_CCR1~4)
Briefly introduce these three registers :
1: Capture / Compare mode register (TIMx_CCMR1/2), This register generally has 2 individual :TIMx _CCMR1 and TIMx _CCMR2. however TIM14 only one .TIMx_CCMR1 control CH1 and 2, and TIMx_CCMR2 control CH3 and 4.
Now we will use TIM14 For example
TIM14_CCMR1 The register bits are described in the figure Shown : Some bits of this register are in different modes , Function differently . Divide the registers 2 layer , The upper layer corresponds to output and the lower layer corresponds to input .
Some bits of this register are in different modes , Function differently . Divide the registers 2 layer , The upper layer corresponds to output and the lower layer corresponds to input .
Mode setting bit OC1M, This part is made up of 3 A composition . A total of... Can be configured 7 Patterns ,
We use PWM Pattern , So this 3 Bit must be set to 110/111.110 and 111 These two kinds of PWM The difference between modes is that the polarity of the output level is opposite .
CC1S Used to set the direction of the channel ( Input / Output ) The default setting is 0, Is to set the channel as the output .
Be careful : This is because of our TIM14 Only 1 Channels , So only the eighth place is valid , The upper eight bits are invalid , Other timers with multiple channels , The top eight is also valid
2:TIM14 Capture of / Compare enable register (TIM14_CCER), This register controls the switch of each input and output channel . The description of each bit of this register is shown in Fig Shown :
This register is relatively simple , We only use CC1E position , This bit is an input / Capture 1 Output enable bit , If you want to PWM from IO output , This bit must be set to 1, So we need to set this bit to 1.
Again , because TIM14 Only 1 Channels , So only the lower four digits are valid , If it is another timer , Other bits of this register may also be valid .
3: Capture / Compare register (TIMx_CCR1~4), This register has 4 individual , Corresponding 4 Channels CH1~4. however TIM14 only one , namely :TIM14_CCR1, The description of each bit of the register is shown in the figure :
position 15:0 CCR1[15:0]: Capture / Compare 1 value
If the passage CC1 To configure For export :
CCR1 To load into the actual capture / Compare 1 Register value ( Preload value )
If it doesn't pass TIMx_CCMR In register OC1PE Bit enable preload function , The written value is transferred directly to the current register . Otherwise, it will only take effect when an update event occurs ( Copy to the capture that actually works / Compare register 1) Actual capture / The comparison register contains the counter to be compared with TIMx_CNT Compare and compare in OC1 The value signaled on the output .
In output mode , The value of this register is the same as CNT Value comparison of , Generate corresponding actions according to the comparison results . Take advantage of this , By modifying the value of this register , You can control PWM The output pulse width of .
If it's a general timer , Then it is enough to configure the above three registers , But if it's an advanced timer , It also needs to be equipped with
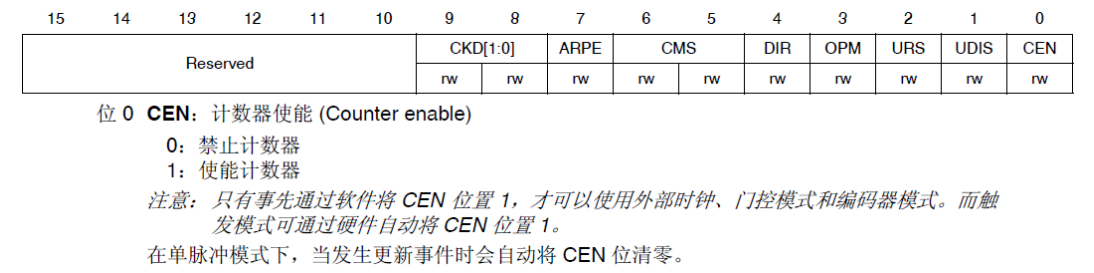
Set up : Brake and deadband register (TIMx_BDTR), The description of each bit of the register is shown in the figure :
This register , We only need to pay attention to the highest position :MOE position , If you want an advanced timer PWM Normal output , Must be set MOE Position as 1, Otherwise there will be no output .
PWM Implementation method
Through TIM14_CH1 Output PWM, The following describes the steps to configure this function through library functions .
1 Turn on TIM14 and GPIO The clock , To configure PF9 Choose the reuse function AF9(TIM14) Output .
To use TIM14, We have to turn on TIM14 The clock of , To configure PF9 For reuse (AF9) Output , To achieve TIM14_CH1 Of PWM after PF9
Output . Library functions enable TIM14 The way to clock is :
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //TIM14 Clock enable
Also enable GPIOF The clock of
To configure PF9 Pin mapping to AF9, Reuse as timer 14, The function called is :
GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9 Reuse as timer 14
The last set PF9 Output for reuse function , Only... Are listed here GPIO A line of code initialized to the reuse function :
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; // Reuse function
For the pin relationship of timer channel , You can see STM32F4 The corresponding data book , such as PWM , We use timers 14 The passage of 1, Corresponding pin PF9 You can see from the data book table :
2 initialization TIM14, Set up TIM14 Of ARR and PSC Equal parameter .
In the open TIM14 After the clock , We need to set ARR and PSC Two registers to control the output PWM The cycle of .
The library function is through TIM_TimeBaseInit Functionally implemented , The format of the call is :
TIM_TimeBaseStructure.TIM_Period = arr; // Set auto reload load value
TIM_TimeBaseStructure.TIM_Prescaler =psc; // Set the prescaler value
TIM_TimeBaseStructure.TIM_ClockDivision = 0; // Set the clock split :TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // Upcount mode
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); // Initialize... According to the specified parameters TIMx Of
3 Set up TIM14_CH1 Of PWM Pattern , Can make TIM14 Of CH1 Output .
Set up TIM14_CH1 by PWM Pattern ( The default is frozen )
In library functions ,PWM passageway
Setting is through the function TIM_OC1Init()~TIM_OC4Init() To set up , Different channels have different settings , here
We use channels 1, So the function used is TIM_OC1Init().
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
Look at the structure TIM_OCInitTypeDef The definition of :
typedef struct
{
uint16_t TIM_OCMode;
uint16_t TIM_OutputState;
uint16_t TIM_OutputNState; */
uint16_t TIM_Pulse;
uint16_t TIM_OCPolarity;
uint16_t TIM_OCNPolarity;
uint16_t TIM_OCIdleState;
uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef
Here are some member variables related to requirements :
- Parameters TIM_OCMode The setting mode is PWM Or output comparison , Here we are PWM Pattern .
- Parameters TIM_OutputState Used to set the compare output enable , That is to enable PWM Output to port .
- Parameters TIM_OCPolarity Used to set whether the polarity is high or low .
- Other parameters TIM_OutputNState,TIM_OCNPolarity,TIM_OCIdleState and TIM_OCNIdleState It's only used by advanced timers .
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // Choice mode PWM
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // Compare output enable
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; // Low output polarity
TIM_OC1Init(TIM14, &TIM_OCInitStructure); // according to T The specified parameter initializes the peripheral TIM1 4OC1
4 Can make TIM14
TIM_Cmd(TIM14, ENABLE); // Can make TIM14
5 modify TIM14_CCR1 To control the duty cycle
After the above settings ,PWM In fact, it has started to output , It's just that the duty cycle and frequency are fixed , And we modify it TIM14_CCR1 You can control CH1 The output duty cycle of .
In library functions , modify TIM14_CCR1 The function of the duty cycle is :
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare2);
For other channels , There is a function name , The function format is TIM_SetComparex(x=1,2,3,4)
Through the above 5 A step , We can control TIM14 Of CH1 Output PWM Wave .
Although the advanced timer is similar to the general timer , But if the advanced timer wants to output PWM, You must also set a
individual MOE position (TIMx_BDTR Of the 15 position ), To enable the main output , Otherwise it won't output PWM. Functions set by library functions
by :
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState)
PWM Frequency settings
adopt PWM You can know the principle of , When the frequency of the timer is fixed ,PWM The period of is only related to ARR of , The timer can also set a frequency division coefficient , So the calculation is as follows
TIM14 The clock is 84M
The frequency division coefficient is a, The overload value is b.
pwm The frequency is 84M/(ab)
pwm The period is (ab)/84M
At the beginning , The purpose is to produce 25hz And 20hz The signal of , Then the settings can be as follows :
25hz:
PWM_PSC = 84;// Division coefficient .---- The counting frequency is 84M/PWM_PSC = 1M hz
PWM_ARR = 40000;// Reload value ----PWM frequency (84M/PWM_PSC)/PWM_ARR = 25 hz
20hz:
PWM_PSC = 84;// Division coefficient .---- The counting frequency is 84M/PWM_PSC = 1M hz
PWM_ARR = 50000;// Reload value ----PWM frequency (84M/PWM_PSC)/PWM_ARR = 25 hz
Code
The key part of the code is given below .
// adopt PWM Generate camera shooting signal
#define CAMERA_TRIGGER_20HZ 0
#define CAMERA_TRIGGER_25HZ 1
u32 PWM_PSC ;//PWM The prescaled coefficients
u32 PWM_ARR ;//PWM Reload value
float PWM_a;//PWM Duty cycle
uint32_t PWM_CCR;//PWM It's worth
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// Set system interrupt priority group 2
delay_init(168); // Initialization delay function
if(CAMERA_TRIGGER_25HZ)
{
PWM_PSC = 84;// Division coefficient .---- The counting frequency is 84M/PWM_PSC = 1M hz
PWM_ARR = 40000;// Reload value ----PWM frequency (84M/PWM_PSC)/PWM_ARR = 25 hz
PWM_a = 0.1;// Duty cycle
}else if(CAMERA_TRIGGER_20HZ)
{
PWM_PSC = 84;// Division coefficient .---- The counting frequency is 84M/PWM_PSC = 1M hz
PWM_ARR = 50000;// Reload value ----PWM frequency (84M/PWM_PSC)/PWM_ARR = 25 hz
PWM_a = 0.1;// Duty cycle
}
PWM_CCR = (uint32_t)PWM_ARR*PWM_a;
TIM14_PWM_Init(PWM_ARR,PWM_PSC); // Set up PWM cycle
TIM_SetCompare1(TIM14,PWM_CCR); // Modify the comparison value , Change the duty cycle
while(1)
{
//delay_ms(1);
}
}
//TIM14 PWM Partial initialization
//PWM Output initialization
//arr: Auto reload value
//psc: Clock presplitting frequency
void TIM14_PWM_Init(u32 arr,u32 psc)
{
// This part needs to be modified manually IO Port setup
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //TIM14 Clock enable
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); // Can make PORTF The clock
GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9 Reuse as timer 14
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOF9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; // Reuse function
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // Speed 100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; // Push pull multiplex output
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; // Pull up
GPIO_Init(GPIOF,&GPIO_InitStructure); // initialization PF9
TIM_TimeBaseStructure.TIM_Prescaler=psc-1; // Timer frequency division
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; // Upcount mode
TIM_TimeBaseStructure.TIM_Period=arr-1; // Automatic reload load value
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM14,&TIM_TimeBaseStructure);// Initialize the timer 14
// initialization TIM14 Channel1 PWM Pattern
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // Select timer mode :TIM Pulse width modulation mode 2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // Compare output enable
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // Output polarity :TIM High output polarity
TIM_OC1Init(TIM14, &TIM_OCInitStructure); // according to T The specified parameter initializes the peripheral TIM1 4OC1
TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable); // Can make TIM14 stay CCR1 Pre loaded registers on
TIM_ARRPreloadConfig(TIM14,ENABLE);//ARPE Can make
TIM_Cmd(TIM14, ENABLE); // Can make TIM14
}
边栏推荐
- Web开发小妙招:巧用ThreadLocal规避层层传值
- JVM memory model
- 机器人队伍学习方法,实现8.8倍的人力回报
- 2022/0524/bookstrap
- Schedulx v1.4.0 and SaaS versions are released, and you can experience the advanced functions of cost reduction and efficiency increase for free!
- Blackfly s usb3 industrial camera: buffer processing
- Analyze "C language" [advanced] paid knowledge [II]
- TiFlash 源码阅读(四)TiFlash DDL 模块设计及实现分析
- Processing image files uploaded by streamlit Library
- Correct use of BigDecimal
猜你喜欢
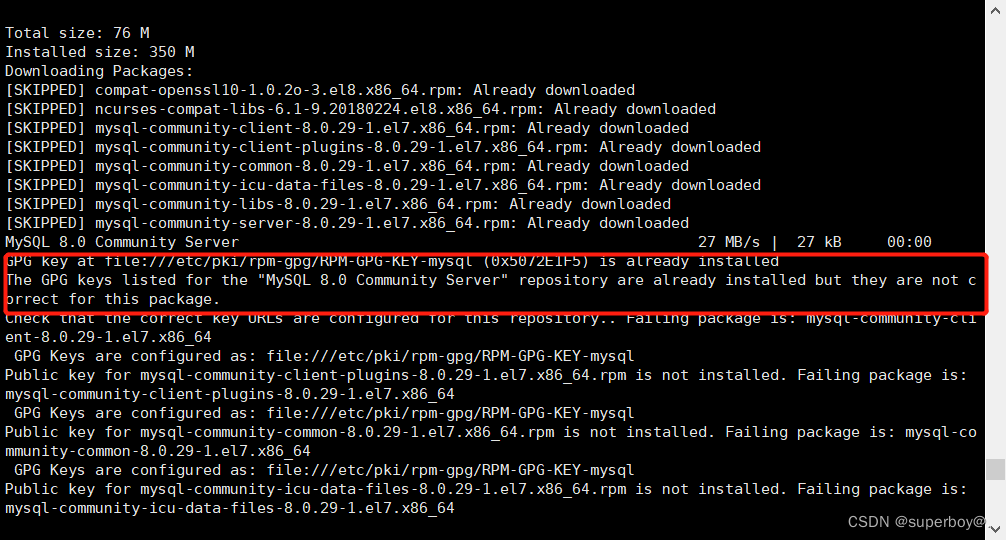
The GPG keys listed for the "MySQL 8.0 community server" repository are already ins
Time synchronization of livox lidar hardware -- PPS method
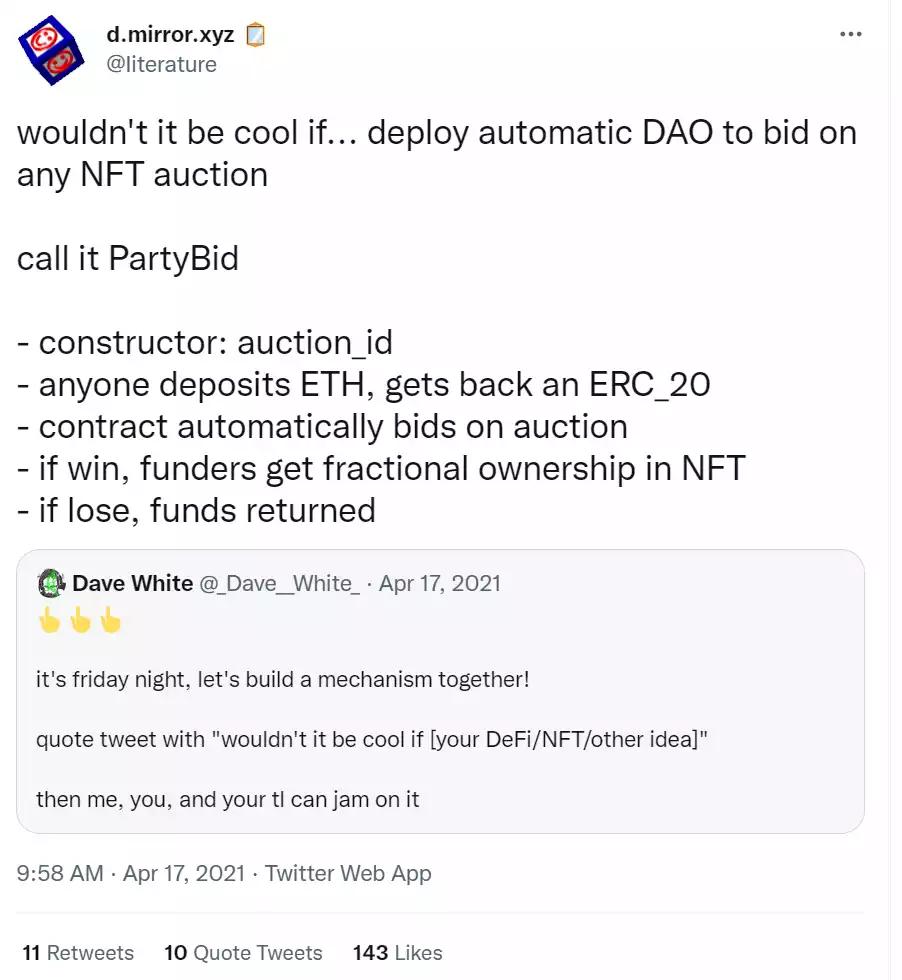
PartyDAO如何在1年内把一篇推文变成了2亿美金的产品DAO
#夏日挑战赛#数据库学霸笔记(下)~
Flir Blackfly S 工业相机:通过外部触发实现多摄像头同步拍摄
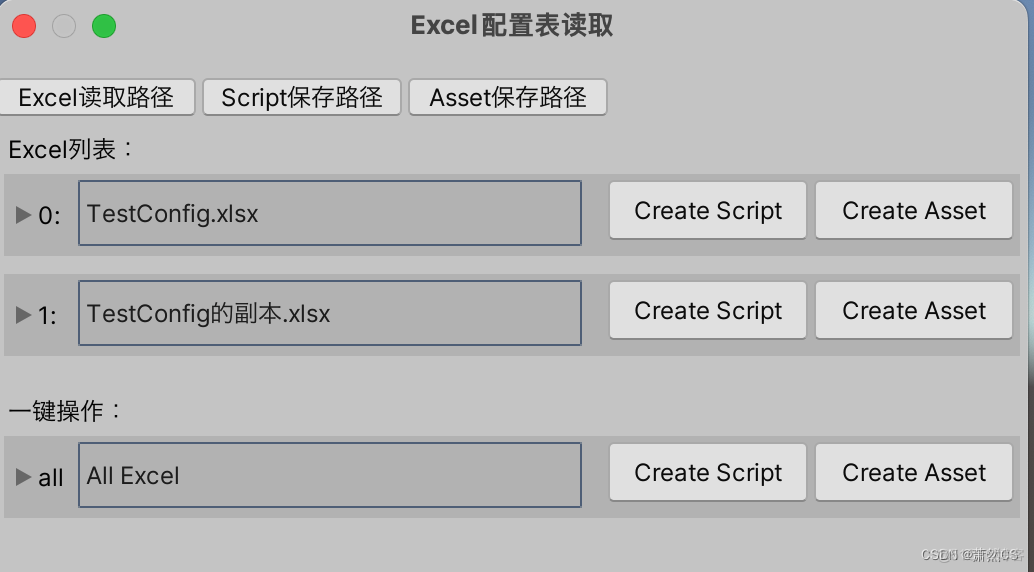
【Unity】升级版·Excel数据解析,自动创建对应C#类,自动创建ScriptableObject生成类,自动序列化Asset文件

FLIR blackfly s industrial camera: configure multiple cameras for synchronous shooting
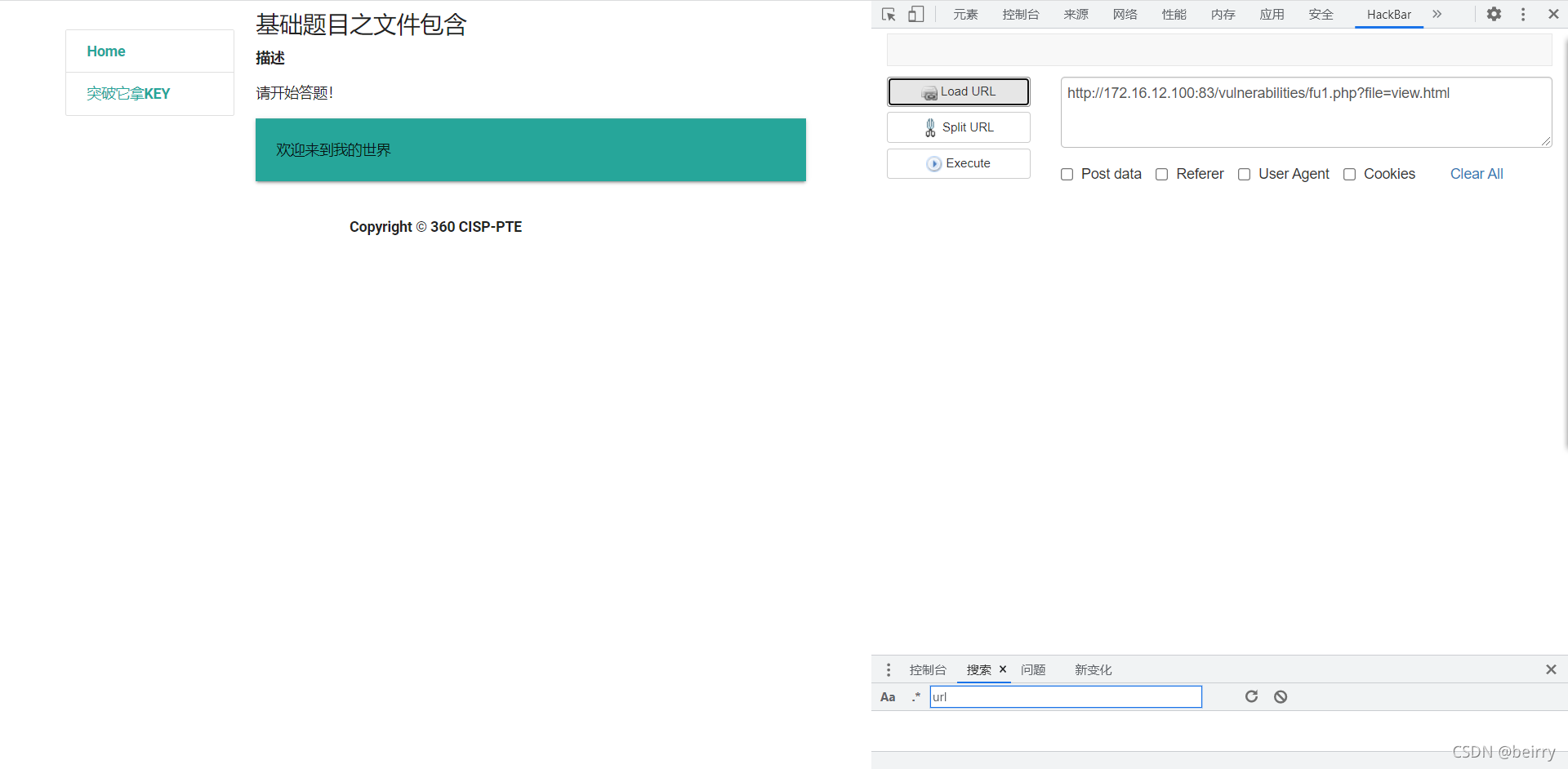
CISP-PTE实操练习讲解(二)
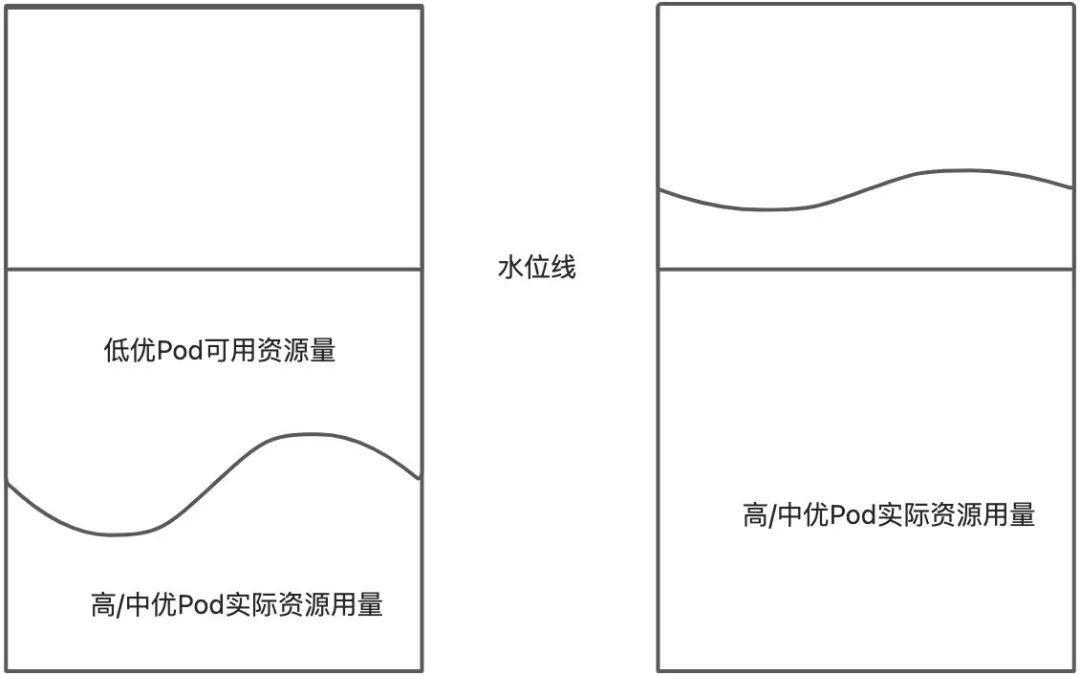
The last line of defense of cloud primary mixing department: node waterline design
ROS学习(23)action通信机制
随机推荐
Zhang Ping'an: accelerate cloud digital innovation and jointly build an industrial smart ecosystem
激光雷达:Ouster OS产品介绍及使用方法
Several classes and functions that must be clarified when using Ceres to slam
红外相机:巨哥红外MAG32产品介绍
Flir Blackfly S 工业相机:通过外部触发实现多摄像头同步拍摄
Integrated navigation: product description and interface description of zhonghaida inav2
Time synchronization of livox lidar hardware -- PPS method
Twenty or thirty thousand a leaf? "Yang Mou" behind the explosion of plant consumption
Jacob Steinhardt, assistant professor of UC Berkeley, predicts AI benchmark performance: AI has made faster progress in fields such as mathematics than expected, but the progress of robustness benchma
Centros 8 installation MySQL Error: The gpg Keys listed for the "MySQL 8.0 Community Server" repository are already ins
ROS learning (24) plugin
【论文阅读|深读】 GraphSAGE:Inductive Representation Learning on Large Graphs
Flir Blackfly S工业相机:颜色校正讲解及配置与代码设置方法
猿桌派第三季开播在即,打开出海浪潮下的开发者新视野
Recent applet development records
ROS learning (21) robot slam function package -- installation and testing of orbslam
一片葉子兩三萬?植物消費爆火背後的“陽謀”
Cisp-pte practice explanation (II)
TiFlash 源码阅读(四)TiFlash DDL 模块设计及实现分析
Ros Learning (23) Action Communication Mechanism