当前位置:网站首页>Improve the accuracy of 3D reconstruction of complex scenes | segmentation of UAV Remote Sensing Images Based on paddleseg
Improve the accuracy of 3D reconstruction of complex scenes | segmentation of UAV Remote Sensing Images Based on paddleseg
2022-07-04 07:14:00 【Paddlepaddle】

Project background
Recovery of motor structure (Structure from Motion, SfM) It is a technology that can automatically recover camera parameters and scene three-dimensional structure from multiple images or video sequences . Due to low cost , This method is widely used , Involving augmented reality 、 Autonomous Navigation 、 Motion capture 、 Hand eye calibration 、 Image and video processing 、 Image based 3D modeling and other fields [1]. Take the application of urban scenes as an example , By taking UAV as the main carrying platform , Obtain a wide range of urban aerial remote sensing images , Use SfM It can restore the three-dimensional structure of the city , It can also collect aerial data of a single building , Restore its fine three-dimensional model according to the sequence image . Although now many studies are aimed at improving SfM A lot of efforts have been made in accuracy , But most SfM Methods are affected by matching results , In complex scenes , Traditional image matching algorithms such as SIFT It is easy to produce mismatching [2], How to effectively filter mismatches is SfM Key issues in the field .
In recent years , With the booming development of semantic segmentation tasks , We can easily use excellent semantic segmentation models to provide high confidence semantic information for specific downstream tasks . for example Zhai wait forsomeone [3] Use the information obtained from the semantic segmentation model to optimize ORB-SLAM2, So that it can maintain stability and optimal positioning performance in a dynamic environment .Chen wait forsomeone [2] Then the semantic segmentation model is used to extract the semantic information of the image to be matched , Provide robust semantic constraints for feature point matching , Improve the accuracy of feature point matching . meanwhile , Semantic constraints extracted from the results of semantic segmentation , Build beam adjustment with equality constraints to optimize 3D Structure and camera pose . The experimental results show that semantic information is used to assist SfM Better reconstruction accuracy can be achieved with the same efficiency . The idea of this paper is worth learning , At the same time, I also noticed that the model used in this article is DeeplabV3+. In a video I saw earlier this year , stay cityscapes-C Running simultaneously on SegFormer and DeeplabV3+, In the video SegFormer Robustness ratio DeeplabV3+ Much better , therefore , I plan to use the propeller image segmentation development kit PaddleSeg Provided in SegFormer The model trains the data set of the paper , by SfM Provide more precise and stable semantic constraints .
Project introduction
SegFormer Model is introduced
PaddleSeg Provided based on the implementation of the propeller SegFormer Model [4], The model will Transformer And lightweight multi-layer perception (MLP) Decoder combination , performance SOTA, Better performance than the SETR、Auto-Deeplab and OCRNet Wait for the Internet . Besides ,PaddleSeg Provides SegFormer-B0 To SegFormer-B5 A series of models , With SegFormer-B4 For example , The model has 64M Parameters , stay ADE20K Data set on the implementation of 50.3% Of mIoU, Smaller parameters than the previous best method 5 times , The accuracy is improved 2.2%.
For a detailed introduction of the model, please refer to :
The original address of the thesis :
https://arxiv.org/abs/2105.15203
Github Code address :
https://github.com/PaddlePaddle/PaddleSeg/tree/release/2.5/configs/segformer
Segformer Reading AI Studio Project address :
https://aistudio.baidu.com/aistudio/projectdetail/3728553
Data set introduction
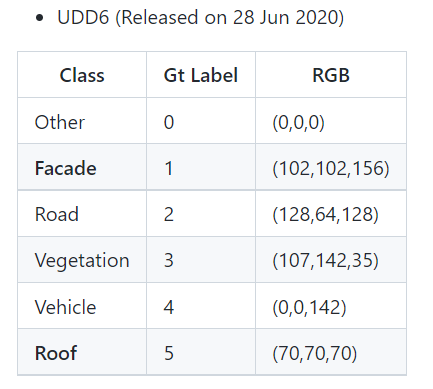
The data set used in this project is UDD6 Data sets , It is used by the graphics and Interaction Laboratory of Peking University DJI-Phantom 4 Drones in China 4 City 60-100m Height collected and marked , For aerial scene understanding 、 Reconstructed dataset . The resolution of the data is 4k(4096*2160) or 12M(4000*3000), It contains various urban scenes . The categories contained in this dataset are shown in the following figure .
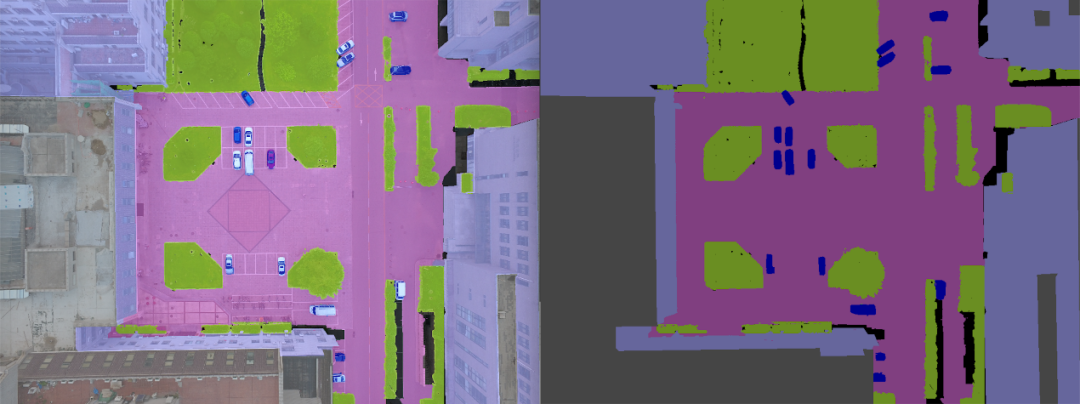
UDD6 Including the building facade 、 road 、 Vegetation 、 automobile 、 Building roofs and others 6 class , An example of data is shown in the figure below .
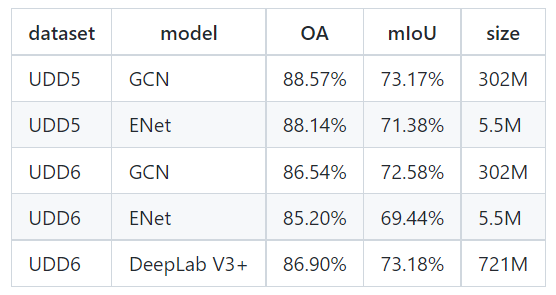
UDD6 Data sets have training sets 160 Zhang He verification set 45 Zhang , No test set . Each segmentation model pair as a benchmark UDD6 The test effect of data validation dataset is shown in the following figure , You can see the best effect is DeeplabV3+,mIoU by 73.18%, Model size by 731M.
UDD6 Dataset address :
https://github.com/MarcWong/UDD
be based on PaddleSeg
Use SegFormer Segmentation of aerial remote sensing images
Now let's start with AI Studio The platform is based on PaddleSeg Kit use SegFormer Model segmentation of aerial remote sensing images . It should be noted that ,AI Studio On is Notebook Environment , So it's running cd You need to add a percent sign in front of the order “%”, Run other shell When ordered , You need to add an exclamation mark in front “!”.
Click to read the original text to get the project link
Welcome to fork&star
https://aistudio.baidu.com/aistudio/projectdetail/3565870
First step download PaddleSeg Kit
Users can start from Github download PaddleSeg, In order to facilitate domestic users to download , The oars also provide Gitee Download mode .
!git clone https://gitee.com/paddlepaddle/PaddleSegThe second step Get ready UDD6 Data sets
The dataset is already attached to the project , Decompress the dataset with the following command .
!mkdir work/UDD6
!unzip -oq data/data75675/UDD6.zip -d work/UDD6/meanwhile , because UDD6 The image size in the data is (4096, 2160) So before training crop Processing into (1024, 1024) Small images to reduce IO The occupation of . Cutting code process_data.py Code in work Under the folder , You can specify the size of the cut 、 Step size and the number of thread pools to speed up efficiency , Run the following command to process .
%cd work/
!python process_data.py --tag val # Process validation sets
!python process_data.py --tag train # Processing training sets The third step Install dependencies
Because we are AI Studio Has been installed paddlepaddle-gpu The library of , So next, just run the following command to install the dependencies related to data processing .
%cd /home/aistudio/PaddleSeg
!pip install -r requirements.txt Step four Dataset list generation
because PaddleSeg The suite is based on the file name list .txt File to define the dataset , Therefore, you need to generate list files of training sets and verification sets .
The suite contains code for dividing data sets to generate file name lists . The code uses the help document URL :
https://github.com/PaddlePaddle/PaddleSeg/blob/release/2.5/docs/data/marker/marker_cn.md
Run the following command .
# Training data set txt Generate
!python tools/split_dataset_list.py \
../work/UDD6 train_sub train_labels_sub \
--split 1.0 0.0 0.0 \
--format JPG png \
--label_class Other Facade Road Vegetation Vehicle Roof
!mv ../work/UDD6/train.txt ../work/UDD6/train_true.txt # Change file name
# Validation data set txt Generate
!python tools/split_dataset_list.py \
../work/UDD6 val_sub val_labels_sub \
--split 0.0 1.0 0.0 \
--format JPG png \
--label_class Other Facade Road Vegetation Vehicle Roof
!rm ../work/UDD6/train.txt # Delete the generated by the second run train.txt
!mv ../work/UDD6/train_true.txt ../work/UDD6/train.txt # Change the file name back Step five Environment configuration and YML Document preparation
Run the following code , Specify an available graphics card .
!export CUDA_VISIBLE_DEVICES=0We use SegFormer-B3 This model , The configuration file segformer_b3_UDD.yml stay work Under the folder , You can modify batch_size、iters、learning_rate Wait for super parameters , Run the following command to copy the configuration file to configs In the folder .
!cp ../work/segformer_b3_UDD.yml configs/ Step six Start training
Execute the following command to call train.py Script start training , During the training, the best model will be saved in output/best_model Under the folder .
!python train.py \
--config configs/segformer_b3_UDD.yml \
--do_eval \
--use_vdl \
--save_interval 500 \
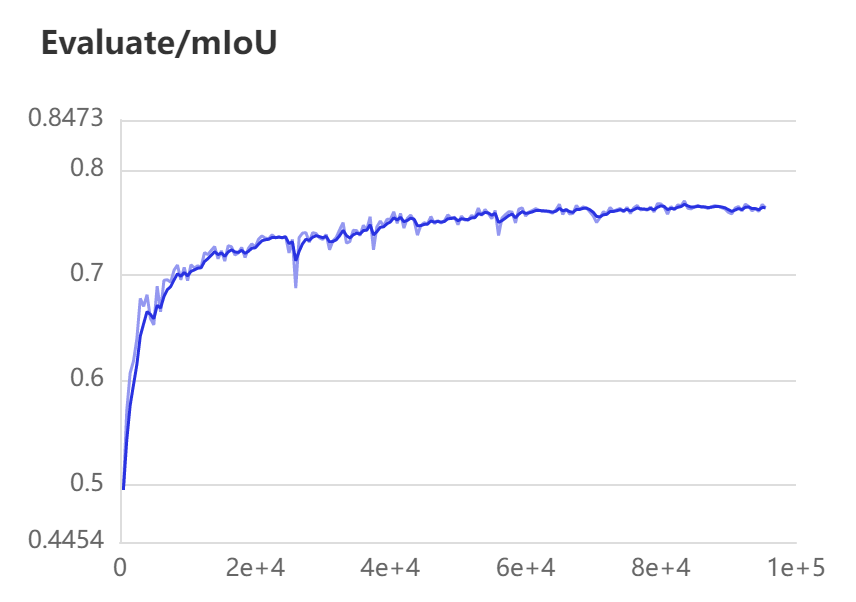
--save_dir outputIn the process of training , Verification set of mIoU The change of indicators is shown in the figure below .
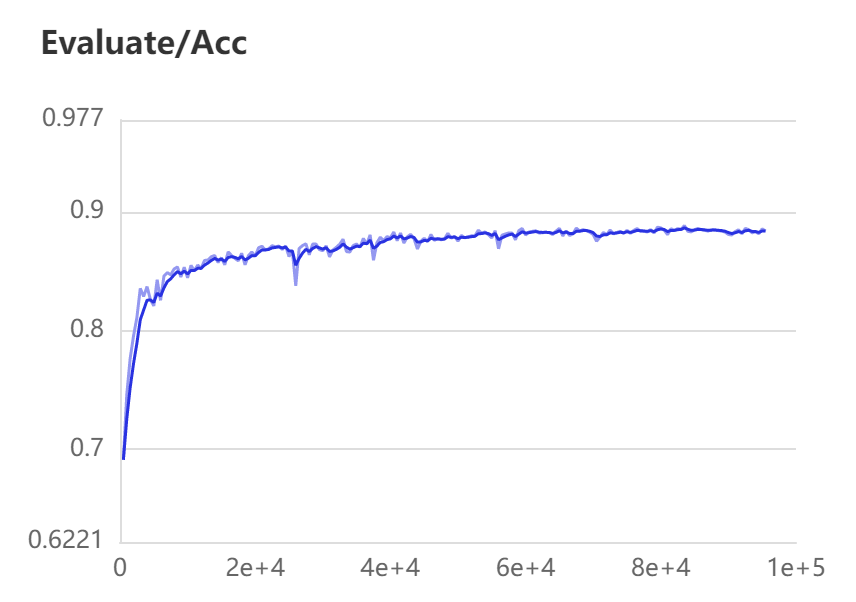
Verification set of Acc The change of indicators is shown in the figure below .
Step seven Prediction and evaluation of results
Execute the following command to call val.py, Use the trained weights to predict and evaluate the validation set .
!python val.py \
--config configs/segformer_b3_UDD.yml \
--model_path ./output/best_model/model.pdparamsThe result of the prediction is UDD6 Data set mIOU achieve 74.50% , Compared with the original paper DeepLabV3+ Of mIOU by 73.18%, high 1.32%.
meanwhile , We can use the trained weights to predict our own aerial images , Execute the following command . among image_path Is the folder path of the image to be predicted .
!python predict.py \
--config ../work/segformer_b3_UDD.yml \
--model_path ./output/best_model/model.pdparams \
--image_path ../work/demo \
--save_dir ../work/result \
--is_slide \
--crop_size 1024 1024 \
--stride 512 512reference
[1] Wei Y M , Kang L , Yang B , et al. Applications of structure from motion: a survey[J]. Journal of Zhejiang University :C Volume English , 2013, 14(7):9.
[2] Yu C , Yao W , Peng L , et al. Large-Scale Structure from Motion with Semantic Constraints of Aerial Images[J]. Springer, Cham, 2018.
[3]Zhai R, Yuan Y. A Method of Vision Aided GNSS Positioning Using Semantic Information in Complex Urban Environment [J]. Remote Sens. 2022, 14, 869.
[4] Xie E , Wang W , Yu Z , et al. SegFormer: Simple and Efficient Design for Semantic Segmentation with Transformers[C]// 2021.
Focus on 【 Flying propeller PaddlePaddle】 official account
Get more technical content ~
边栏推荐
- BasicVSR++: Improving Video Super-Resolutionwith Enhanced Propagation and Alignment
- Deep profile data leakage prevention scheme
- There is no Chinese prompt below when inputting text in win10 Microsoft Pinyin input method
- "Sword finger offer" 2nd Edition - force button brush question
- MySQL 45 lecture learning notes (VI) global lock
- 大厂技术专家:架构设计中常用的思维模型
- Selection (023) - what are the three stages of event propagation?
- MySQL storage engine
- js 常用时间处理函数
- flask-sqlalchemy 循环引用
猜你喜欢
![[network data transmission] FPGA based development of 100M / Gigabit UDP packet sending and receiving system, PC to FPGA](/img/71/1d6179921ae84b1ba61ed094e592ff.png)
[network data transmission] FPGA based development of 100M / Gigabit UDP packet sending and receiving system, PC to FPGA
Recursive Fusion and Deformable Spatiotemporal Attention for Video Compression Artifact Reduction
大厂技术专家:架构设计中常用的思维模型

Review of enterprise security incidents: how can enterprises do a good job in preventing source code leakage?
Introduction to deep learning Ann neural network parameter optimization problem (SGD, momentum, adagrad, rmsprop, Adam)
Recursive Fusion and Deformable Spatiotemporal Attention for Video Compression Artifact Reduction
The important role of host reinforcement concept in medical industry
MySQL 45 lecture learning notes (VII) line lock

Cervical vertebra, beriberi
![[Android reverse] function interception (use cache_flush system function to refresh CPU cache | refresh CPU cache disadvantages | recommended time for function interception)](/img/5c/afb0d43665a8b46579dc604d983790.jpg)
[Android reverse] function interception (use cache_flush system function to refresh CPU cache | refresh CPU cache disadvantages | recommended time for function interception)
随机推荐
leetcode825. 适龄的朋友
大厂技术专家:架构设计中常用的思维模型
If there are two sources in the same job, it will be reported that one of the databases cannot be found. Is there a boss to answer
Campus network problems
MySQL 45 lecture learning notes (VII) line lock
Electronic Association C language level 1 35, bank interest
uniapp小程序分包
Since DMS is upgraded to a new version, my previous SQL is in the old version of DMS. In this case, how can I retrieve my previous SQL?
Set JTAG fuc invalid to normal IO port
NLP-文献阅读总结
About how idea sets up shortcut key sets
selenium驱动IE常见问题解决Message: Currently focused window has been closed.
Cell reports: Wei Fuwen group of the Institute of zoology, Chinese Academy of Sciences analyzes the function of seasonal changes in the intestinal flora of giant pandas
输入年份、月份,确定天数
MySQL error resolution - error 1261 (01000): row 1 doesn't contain data for all columns
请问旧版的的常用SQL怎么迁移到新版本里来?
MySQL relearn 2- Alibaba cloud server CentOS installation mysql8.0
MySQL 45 lecture learning notes (XIII) delete half of the table data, and the table file size remains the same
[FPGA tutorial case 8] design and implementation of frequency divider based on Verilog
Experience installing VMware esxi 6.7 under VMware Workstation 16