当前位置:网站首页>Threedposetracker project resolution
Threedposetracker project resolution
2022-07-06 01:12:00 【Boiled Green Vegetable】
Catalog
(2) Theoretical analysis of algorithm
3、 ... and 、 Limb drive flow chart
One 、 Source code
Digital Standard Co., LTD. (github.com)
Reference article :
- Cartoon driven project ThreeDPoseTracker—— Key point smoothing scheme analysis
- 3D Attitude estimation ——ThreeDPose Easy to use model analysis of the project
plug-in unit :ThreeDPoseTracker Source related plug-ins
Two 、 Body drive
1. Algorithm model
(1) Data description
The code of algorithm model prediction data in the project is mainly VNectBarracudaRunner.cs. function PredictPose() The updated node data in is JointPoint Three variables in ( That is, the algorithm data to be used when driving ):
public class JointPoint
{
public Vector3 Pos3D = new Vector3();
public float score3D;
public bool Visibled;
}JointPoint There are also several variables in the class that are used for data optimization in the prediction process ( Anti jitter, etc ) Of :
public class JointPoint
{
public Vector3 Now3D = new Vector3();
public Vector3[] PrevPos3D = new Vector3[6];
public Vector3 P = new Vector3();
public Vector3 X = new Vector3();
public Vector3 K = new Vector3();
}JointPoint Other data in the class need to be calculated by yourself when driven by limbs :
public class JointPoint
{
public Transform Transform = null;
public Quaternion InitRotation;
public Quaternion Inverse;
public Quaternion InverseRotation;
public JointPoint Child = null;
public JointPoint Parent = null;
}(2) Theoretical analysis of algorithm
Resolve jitter : Kalman filtering + Low pass filtering : Key smoothing scheme
Algorithm model analysis : Analytical model 、 heatmap&offset
- There are three input, It's all the same , All input (448,448,3) Pictures of the :
private void UpdateVNectAsync()
{
input = new Tensor(videoCapture.MainTexture, 3);
if (inputs[inputName_1] == null)
{
inputs[inputName_1] = input;
inputs[inputName_2] = new Tensor(videoCapture.MainTexture, 3);
inputs[inputName_3] = new Tensor(videoCapture.MainTexture, 3);
}
else
{
inputs[inputName_3].Dispose();
inputs[inputName_3] = inputs[inputName_2];
inputs[inputName_2] = inputs[inputName_1];
inputs[inputName_1] = input;
}
if (!Lock && videoCapture.IsPlay())
{
StartCoroutine(ExecuteModelAsync());
}
}
- four output, But we only use the last two :
for (var i = 2; i < _model.outputs.Count; i++)
{
b_outputs[i] = _worker.PeekOutput(_model.outputs[i]);
}
offset3D = b_outputs[2].data.Download(b_outputs[2].shape);
heatMap3D = b_outputs[3].data.Download(b_outputs[3].shape);
use heatmap Roughly position the joint , And then use offset stay heatmap As a result, the joint position is adjusted accurately .
heatmap Of ( 672 , 28 , 28 ) representative 24 With two joints 28 Size is (28,28) Characteristic graph . and offset Than heatmap Three times more characteristic graphs , Obviously, it is the precise positioning just mentioned , It just needs to be offset To x,y,z Three coordinates , So it's a triple relationship .
- heatmap The order of is 1 The first joint 1 A feature map 、 The first 1 The first joint 2 A feature map 、…、 The first 2 The first joint 1 A feature map 、 The second joint 2 A feature map 、…、 The first 24 The first joint 28 A feature map
- offsetmap The order of is 1 The first joint 1 Corresponding to each characteristic graph x Coordinate offset 、 The first 1 The first joint 2 Corresponding to each characteristic graph x Coordinate offset 、 The first 1 The first joint 3 Corresponding to each characteristic graph x Coordinate offset 、…、 The first 1 The first joint 28 Corresponding to each characteristic graph x Coordinate offset 、…、 The first 2 The first joint 1 Corresponding to each characteristic graph x Coordinate offset 、…、 The first 24 The first joint 28 Corresponding to each characteristic graph x Coordinate offset 、 The first 1 The first joint 1 Corresponding to each characteristic graph y Coordinate offset 、 The first 1 The first joint 2 Corresponding to each characteristic graph y Coordinate offset 、…、 The first 24 The first joint 28 Corresponding to each characteristic graph y Coordinate offset 、 The first 1 The first joint 1 Corresponding to each characteristic graph z Coordinate offset 、 The first 1 The first joint 2 Corresponding to each characteristic graph z Coordinate offset 、…、 The first 24 The first joint 28 Corresponding to each characteristic graph z Coordinate offset .
2.Unity Body drive
The body driven code in the project is mainly VNectModel.cs.
(1) Related knowledge
- The inverse of four elements ,⽐ Such as ⼀ Quaternions are (1,1,1,1) Its inverse is (-1,-1,-1,1).
Quaternion Inverse(Quaternion rotation);return ⼀ An opposite rotation .
- Watch the rotation
public static Quaternion LookRotation(Vector3 forward, [DefaultValue("Vector3.up")] Vector3 upwards);Create a specific forward and upward Direction of rotation , Returns a computed quaternion . If used to determine a transform: If the vector is orthogonal , z The axis will be and forward alignment ,y The axis will be and upward alignment . If forward The direction is 0 Will be an error .
(2) Use in projects
from Of the current joint lookrotation= Initial rotation InitRotation× Align matrix And  It can be concluded that :
It can be concluded that :
a. Quaternion.Inverse( Align matrix )= Current rotation Rotation*Quaternion.Inverse( Of the current joint lookrotation)
hip.Inverse = Quaternion.Inverse(Quaternion.LookRotation(forward));
hip.InverseRotation = hip.Inverse * hip.InitRotation;function Init() There are a lot of similar code in , The purpose is Find the intermediate matrix , According to the intermediate matrix , We can get the current object The rotation of the .VNectModel.cs Medium hip.InverseRotation Namely Quaternion.Inverse( Align matrix ).
b. Current rotation Rotation= Of the current joint lookrotation×Quaternion.Inverse( Align matrix )
// Calculate the orientation of the human body based on the coordinates of the root joint and the left and right crotch joints , Then use this as all joints LookRotation Of y Direction
var forward = TriangleNormal(jointPoints[PositionIndex.hip.Int()].Pos3D, jointPoints[PositionIndex.lThighBend.Int()].Pos3D, jointPoints[PositionIndex.rThighBend.Int()].Pos3D);
jointPoints[***].Transform.rotation = Quaternion.LookRotation(Vector3.up, forward) * jointPoint[***].InverseRotation;
function PoseUpdate() For limb drive , The above line of code is used to calculate the current rotation of the joint .
c. Align matrix = Of the current joint lookrotation*Quaternion.Inverse( Current rotation Rotation);
root = animator.GetBoneTransform(HumanBodyBones.Hips);
midRoot = Quaternion.Inverse(root.rotation) * Quaternion.LookRotation(forward);//midRoot To align the matrix These codes do not exist in the project , Just to better explain the formula .
3、 ... and 、 Limb drive flow chart

边栏推荐
- A preliminary study of geojson
- Use of crawler manual 02 requests
- Paging of a scratch (page turning processing)
- Pbootcms plug-in automatically collects fake original free plug-ins
- After 95, the CV engineer posted the payroll and made up this. It's really fragrant
- Recursive method converts ordered array into binary search tree
- The population logic of the request to read product data on the sap Spartacus home page
- Three methods of script about login and cookies
- Mlsys 2020 | fedprox: Federation optimization of heterogeneous networks
- For a deadline, the IT fellow graduated from Tsinghua suddenly died on the toilet
猜你喜欢

After 95, the CV engineer posted the payroll and made up this. It's really fragrant
Blue Bridge Cup embedded stm32g431 - the real topic and code of the eighth provincial competition
VMware Tools安装报错:无法自动安装VSock驱动程序

Ubantu check cudnn and CUDA versions

The third season of ape table school is about to launch, opening a new vision for developers under the wave of going to sea

WordPress collection plug-in automatically collects fake original free plug-ins
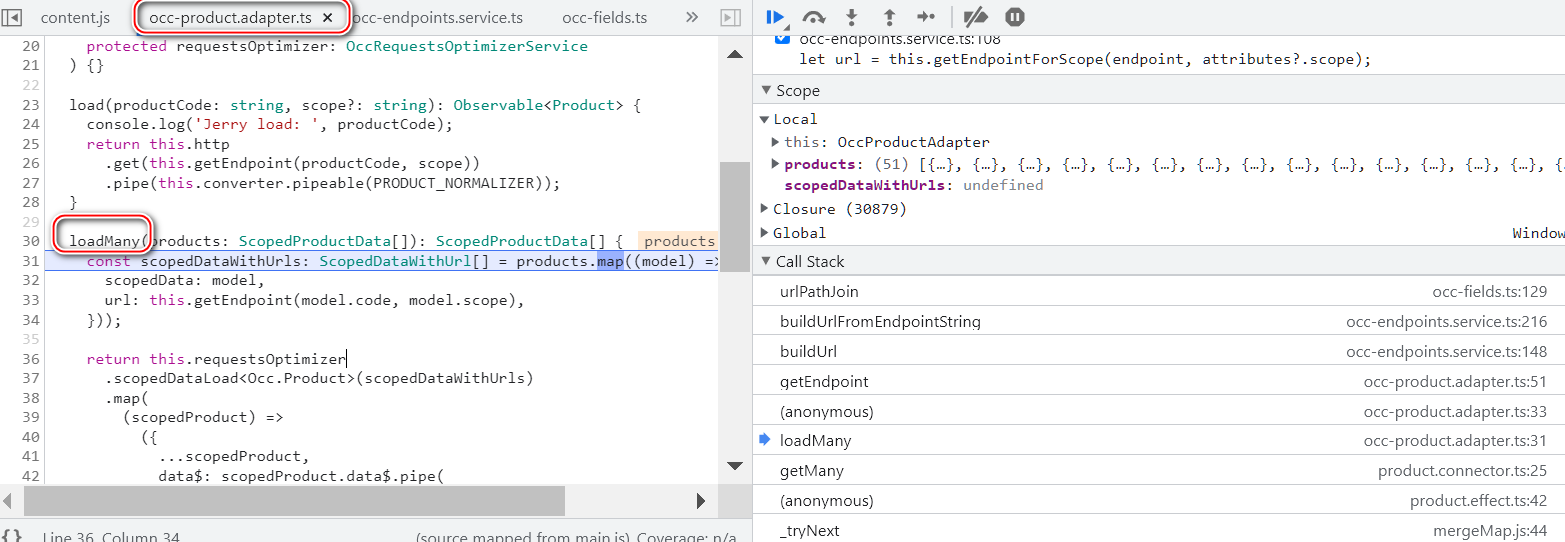
The population logic of the request to read product data on the sap Spartacus home page
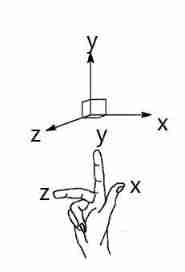
Introduction to robotics I. spatial transformation (1) posture, transformation
Fibonacci number
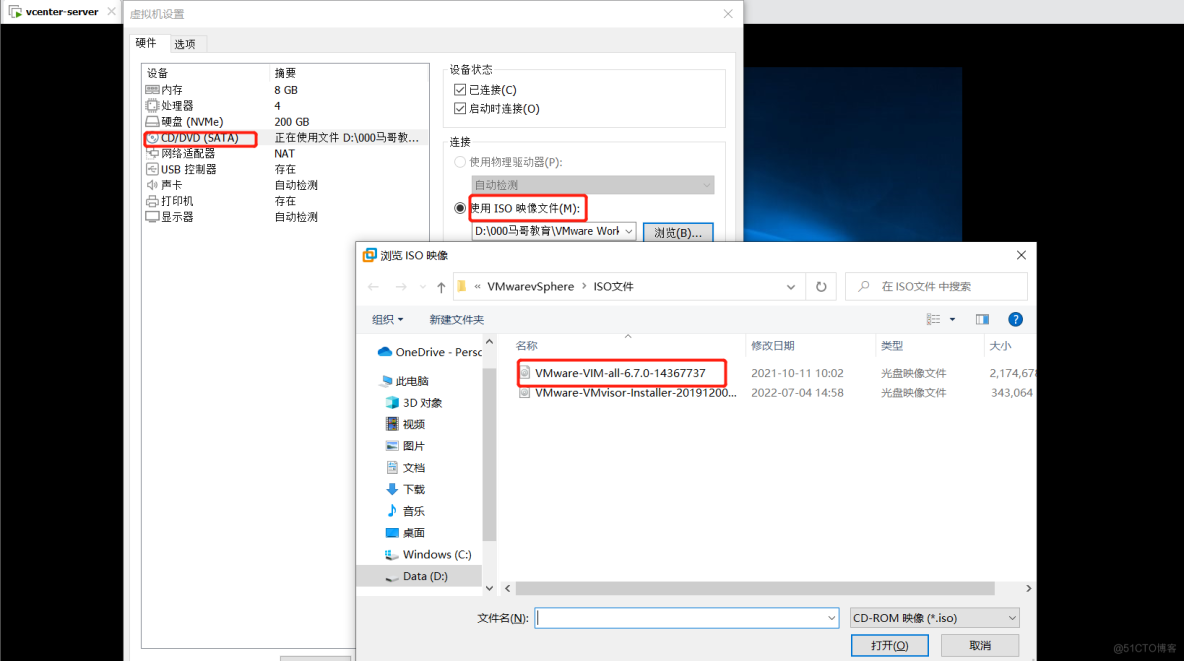
vSphere实现虚拟机迁移
随机推荐
3D模型格式汇总
几百行代码实现一个 JSON 解析器
[groovy] JSON serialization (jsonbuilder builder | generates JSON string with root node name | generates JSON string without root node name)
Differences between standard library functions and operators
Why can't mathematics give machine consciousness
Live broadcast system code, custom soft keyboard style: three kinds of switching: letters, numbers and punctuation
Arduino hexapod robot
Obstacle detection
[Arduino syntax - structure]
Is chaozhaojin safe? Will it lose its principal
程序员搞开源,读什么书最合适?
China Taiwan strategy - Chapter 8: digital marketing assisted by China Taiwan
Use of crawler manual 02 requests
curlpost-php
Four commonly used techniques for anti aliasing
The population logic of the request to read product data on the sap Spartacus home page
Some features of ECMAScript
golang mqtt/stomp/nats/amqp
Cf:h. maximum and [bit operation practice + K operations + maximum and]
A preliminary study of geojson