当前位置:网站首页>I 用c l 栈与队列的相互实现
I 用c l 栈与队列的相互实现
2022-07-05 07:22:00 【MT_125】
目录
一、用对列实现栈
题干要求:
细节分析:队列是先进先出; 要实现的栈是先进后出。
解题思路:假设:先用一个队列储存数据 N 个,然后将前 N-1 个数据导入到另一个队列,
此时,原始队列中仅剩一个,是最后剩的数据,便可将其导出,这便是一次后进先出。
细节点 :每次导出数据时,都需要一个队列向另一个队列传入数据,因此输入队列和输出队列 需要轮换,要对其进行判定。
具体过程gif动态图如下:
代码实现:
1.初始化栈:先初始化两个队列
//栈的结构是由两个队列构成
typedef struct Nystack{
Quetail q1;
Quetail q2;
} MyStack;
//栈的初始化
MyStack* myStackCreate() {
MyStack* Newstack = (MyStack*)malloc(sizeof(MyStack));
Que_Init(&Newstack->q1);
Que_Init(&Newstack->q2);
return Newstack;
}2. 插入数据
因为存储数据的队列不是固定的,因此在一个队列有数据的前提下,就继续向该队列插入数据,
空的队列负责在导出数据时进行轮转。(哪个不空向哪个插入)
//插入数据
void myStackPush(MyStack* obj, int x) {
//if((&obj->q1)->head == NULL) //法一:直接判断是否为空
if(Que_Empty(&obj->q1)) //法二:后续函数的复用
Que_push(&obj->q2,x);
else
Que_push(&obj->q1,x);
}3.导出数据(实现先进后出)
第一步:将有数据的队列中除最后进的数据,依次导入到另一个空队列 ;
导入空队列,删除原队列,保留最后数据。
第二布:将原队列中最后一个数据导出 。
注:这里先假设了两个队列中,一个是原队列和一个是空队列,再进行判定,若与实际不符,则 交换 。
int myStackPop(MyStack* obj) {
int temp = 0;
//假设原队列和空队列
Quetail* existque = &obj->q1,*nullque = &obj->q2;
if((&obj->q1)->head == NULL) //判断与实际是否相符
{
existque = nullque;
nullque = &obj->q1;
}
for(;existque->head->Next;) //保留最后一个数据
{
Que_push(nullque,existque->head->data); //向空队列导入数据
Que_pop(existque); //删除原队列数据
}
temp = existque->head->data;
Que_pop(existque); //导出最后进的数据
return temp;
}4.查找栈顶数据
找到不空的队列 >> 返回其队尾的数据
int myStackTop(MyStack* obj) {
if((&obj->q1)->head == NULL)
{
return (&obj->q2)->tail->data;
}
return (&obj->q1)->tail->data;
}5.判断栈是否为空:
判断两个队列是否均为空
bool myStackEmpty(MyStack* obj) {
assert(obj);
//法一:直接判断
//if((&obj->q1)->head == NULL&& (&obj->q2)->head == NULL)
//法二:复用队列判空函数
if(Que_Empty(&(obj->q1))&&Que_Empty(&(obj->q2)))
return true;
return false;
}
6.销毁栈:
销毁两个队列
void myStackFree(MyStack* obj) {
Que_Destory(&obj->q1);
Que_Destory(&obj->q2);
free(obj);
}二、用栈实现队列
题干要求:
细节分析:这次是用两个栈,实现先进先出 。
解题思路:首先,将两个栈分为入口栈和出口栈,
其次,数据正序入口栈,由于栈是先进后出,因此将数据再逆序进入出口栈,
然后,此时数据再出口栈中是逆序,所以,便可以正序从出口栈中依次排出 。
代码实现:
1.初始化双栈队列
typedef struct {
Stack T1;
Stack T2;
} MyQueue;
MyQueue* myQueueCreate() {
MyQueue *Q1;
Q1 = (MyQueue*)malloc(sizeof(MyQueue));
Stack_init(&(Q1->T1)); // T1 做入口栈
Stack_init(&(Q1->T2)); // T2 做出口栈
return Q1;
}2.插入数据
void myQueuePush(MyQueue* obj, int x) {
Stack_push(&obj->T1,x); //这里将栈 T1 作为入口栈
}3.删除数据(先进先出)
将入口栈数据记录 >> 删除入口栈数据 >> 导入出口栈 >> 从出口栈导出数据
int myQueuePop(MyQueue* obj) {
if(Stack_Empty(&obj->T2)) //判断是否为空
{
int k = 0;
for(;!Stack_Empty(&obj->T1);)
{
k = Stack_Top(&obj->T1); //记录入口站数据
Stack_pop(&obj->T1); //删除入口栈数据
Stack_push(&obj->T2,k); //导入出口栈
}
}
int temp = 0;
temp = Stack_Top(&obj->T2);
Stack_pop(&obj->T2); //从出口栈导出数据
return temp; //题干要求返回导出的值
}4.查找队列头部数据
这里的头部数据是正序的头数据,因此要先将入口栈中的逆序数据导入出口栈,
变成正序,再返回出口栈的栈顶数据 。
int myQueuePeek(MyQueue* obj) {
if(Stack_Empty(&obj->T2)) //判断出口栈中是否有数据
{
int k = 0;
for(;!Stack_Empty(&obj->T1);) //向出口栈导入数据
{
k = Stack_Top(&obj->T1);
Stack_pop(&obj->T1);
Stack_push(&obj->T2,k);
}
}
return Stack_Top(&obj->T2); //返回出口栈栈顶数据
}5.判断队列是否为空 及 销毁队列
//判断队列是否为空
bool myQueueEmpty(MyQueue* obj) {
//判断两个栈是否均为空
return Stack_Empty(&obj->T1)&&Stack_Empty(&obj->T2);
}
//销毁释放队列
void myQueueFree(MyQueue* obj) {
Stack_pop(&obj->T1);
Stack_pop(&obj->T2);
free(obj);
}感谢大家的支持!!!
边栏推荐
- MySQL setting trigger problem
- I can't stand the common annotations of idea anymore
- SD_ CMD_ RECEIVE_ SHIFT_ REGISTER
- Shadowless cloud desktop - online computer
- 611. 有效三角形的个数
- Matrix keyboard scan (keil5)
- Chapter 2: try to implement a simple bean container
- Basic series of SHEL script (II) syntax + operation + judgment
- ImportError: No module named ‘Tkinter‘
- [idea] efficient plug-in save actions to improve your work efficiency
猜你喜欢
CADD课程学习(5)-- 构建靶点已知的化合结构(ChemDraw)

611. 有效三角形的个数
第 2 章:小试牛刀,实现一个简单的Bean容器
M2DGR 多源多场景 地面机器人SLAM数据集

Using GEE plug-in in QGIS
【软件测试】02 -- 软件缺陷管理
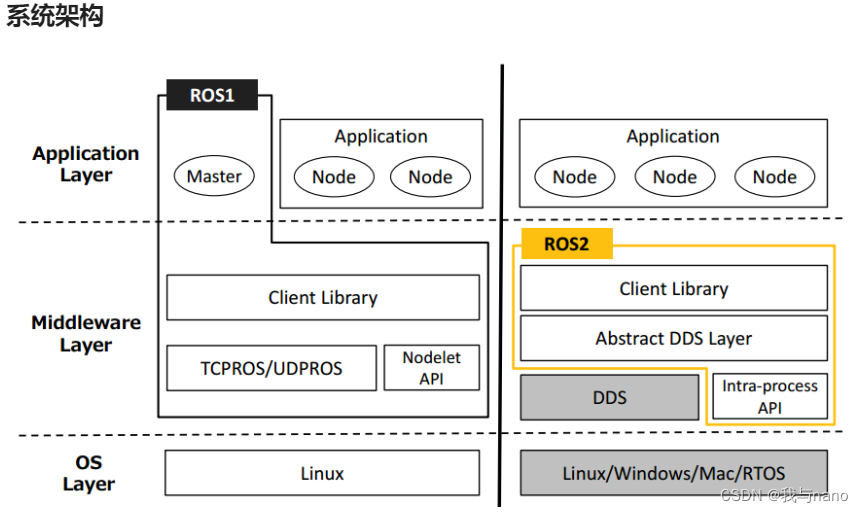
Ros2 - ros2 vs. ros1 (II)
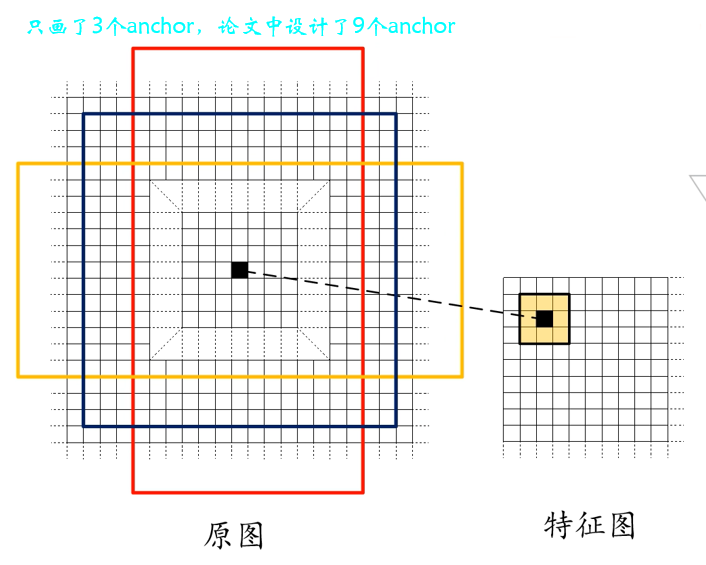
Target detection series - detailed explanation of the principle of fast r-cnn
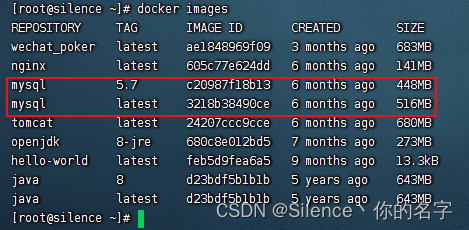
Steps and FAQs of connecting windows Navicat to Alibaba cloud server MySQL
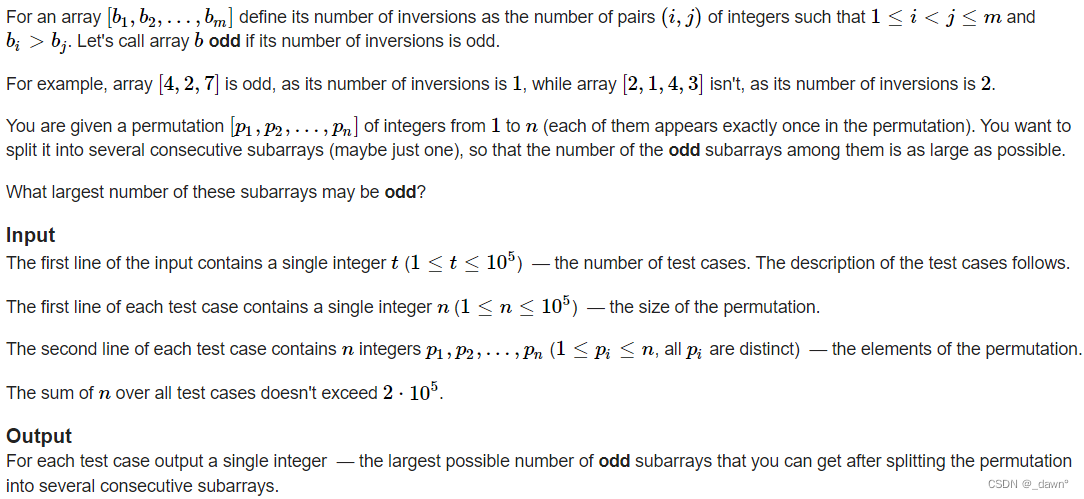
Daily Practice:Codeforces Round #794 (Div. 2)(A~D)
随机推荐
Shadowless cloud desktop - online computer
An article was opened to test the real situation of outsourcing companies
Jenkins reported an error. Illegal character: '\ufeff'. Class, interface or enum are required
The problem of configuring opencv in qt5.13.2 is solved in detail
氢氧化钠是什么?
HDU1232 畅通工程(并查集)
Install deeptools in CONDA mode
Hdu1232 unimpeded project (and collection)
现在有html文件,和用vs制作的mvc(连接了数据库),怎么两个相连?
IPage能正常显示数据,但是total一直等于0
How to deal with excessive memory occupation of idea and Google browser
Ros2 - install ros2 (III)
(top) pretty girl binary color code portal
2022.06.27_每日一题
【软件测试】02 -- 软件缺陷管理
Batch convert txt to excel format
Interpretation of the earliest sketches - image translation work sketchygan
C#学习笔记
[software testing] 05 -- principles of software testing
GPIO port bit based on Cortex-M3 and M4 with operation macro definition (can be used for bus input and output, STM32, aducm4050, etc.)