当前位置:网站首页>Tshydro tool
Tshydro tool
2022-07-05 07:14:00 【RS&Hydrology】
One 、 Tool is introduced
https://github.com/cavios/tshydro
tshydro:R package that estimates water level time series from satellite altimetry data.
The core of the package is a state-space model with a mixture distribution to account for erroneous observations.
Model input :
height
track
time
Model output :
time
water level
water level sd
The dynamic model is mainly used to deal with all the water levels of the lake , Constructing water level time series of lakes .
Dynamic model refers to the combination of error mixed model and spatial state model , It includes two parts: process model and observation model .
The process model is used to represent the relationship between the real water levels ; The observation model is used to reflect the relationship between the actual observed water level and the real water level .
Two 、 Use steps
(1) Download Kit tshydro, Refer to https://blog.csdn.net/qq_32649321/article/details/120038222
test tshydro Is the package installed successfully , Input at the console :library(tsHydro)
Indicates successful installation !
(2) Load test data , verification tshydro Model
data(namco)
fit<-get.TS(namco)
plot(fit)
https://github.com/cavios/tshydro
3、 ... and 、 Reference material
http://lps16.esa.int/posterfiles/paper1290/Altimetry%20for%20inland%20water.pdf
Validation of CryoSat-2 SAR mode based lake levels.
边栏推荐
- Implementation of one-dimensional convolutional neural network CNN based on FPGA (VIII) implementation of activation layer
- 第 2 章:小试牛刀,实现一个简单的Bean容器
- Xiaomi written test real question 1
- ROS2——Service服务(九)
- Spinningup drawing curve
- Anaconda navigator click open no response, can not start error prompt attributeerror: 'STR' object has no attribute 'get‘
- 一文揭开,测试外包公司的真实情况
- 2022.06.27_ One question per day
- 【软件测试】02 -- 软件缺陷管理
- Empire help
猜你喜欢
![[software testing] 04 -- software testing and software development](/img/bd/49bba7ee455ce59e726a2fdeafc7c3.jpg)
[software testing] 04 -- software testing and software development
【无标题】
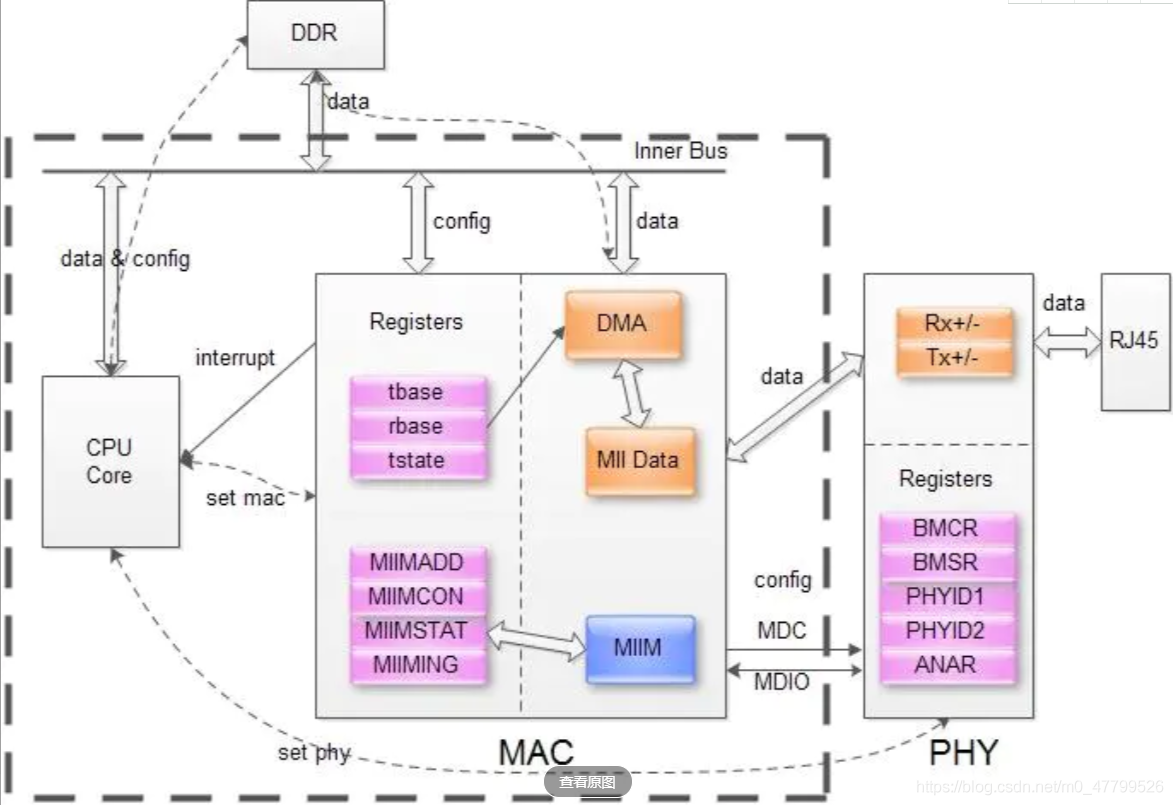
PHY drive commissioning - phy controller drive (II)
Skywalking all
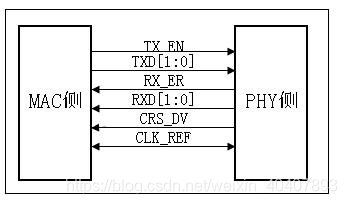
扫盲-以太网MII接口类型大全-MII、RMII、SMII、GMII、RGMII、SGMII、XGMII、XAUI、RXAUI
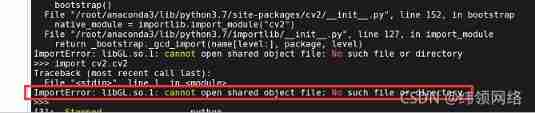
Import CV2 prompt importerror: libgl so. 1: Cannot open shared object file: no such file or directory
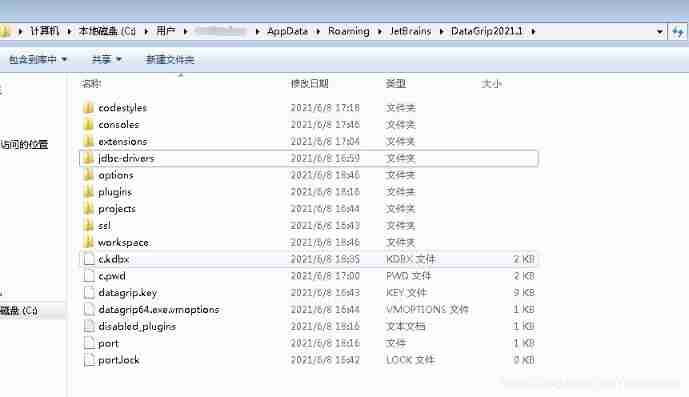
DataGrid offline installation of database driver

Ros2 - first acquaintance with ros2 (I)
三体目标管理笔记
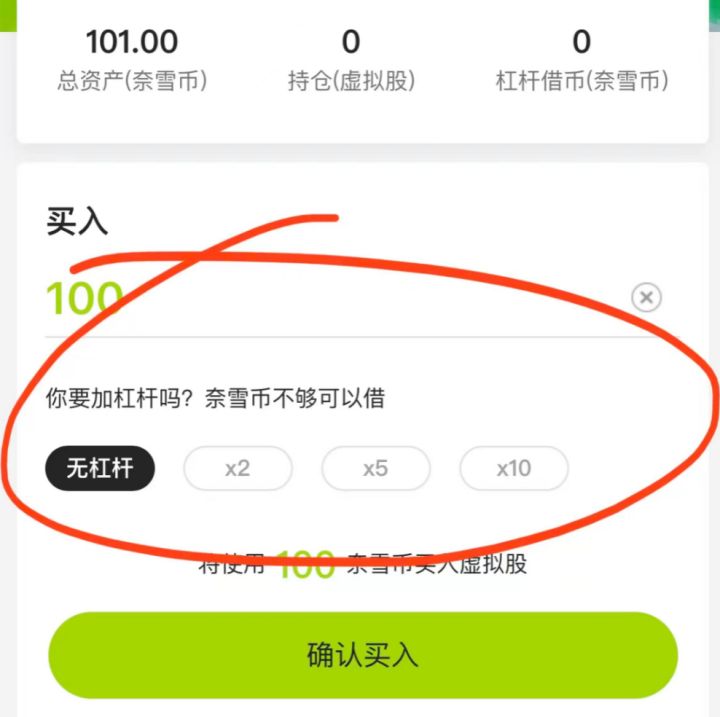
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
随机推荐
[software testing] 02 -- software defect management
PHY驱动调试之 --- MDIO/MDC接口22号和45号条款(一)
ModuleNotFoundError: No module named ‘picamera‘
一文揭开,测试外包公司的真实情况
Interpretation of the earliest sketches - image translation work sketchygan
An article was opened to test the real situation of outsourcing companies
数学分析_笔记_第8章:重积分
Brief description of inux camera (Mipi interface)
[vscode] recommended plug-ins
[tf] Unknown: Failed to get convolution algorithm. This is probably because cuDNN failed to initial
氢氧化钠是什么?
What if the DataGrid cannot see the table after connecting to the database
Qu'est - ce que l'hydroxyde de sodium?
Three body goal management notes
PHY drive commissioning - phy controller drive (II)
[idea] efficient plug-in save actions to improve your work efficiency
Ros2 - ros2 vs. ros1 (II)
2022.06.27_每日一题
Mid 2022 documentary -- the experience of an ordinary person
Ros2 - first acquaintance with ros2 (I)