当前位置:网站首页>Correction binoculaire
Correction binoculaire
2022-07-02 07:48:00 【Silence des nuages】
Un.、Étalonnage binoculaire
Le double ciblage nécessite l'acquisition des paramètres internes des deux caméras et de la matrice de transformation.Lien référencé:
https://blog.csdn.net/qq_38236355/article/details/89280633
https://blog.csdn.net/qingfengxiaosong/article/details/109897053
Ou Baidu seul
Utilisation recommandéeMatlabÉtalonnage de la boîte à outils,Où il est recommandé de cocher3 Coefficients.
ProduitsMatlabAprès les données de,Utilisez le script suivant pour extraire les données:
rowName = cell(1,10);
rowName{1,1} = 'Matrice de traduction';
rowName{1,2} = 'Matrice de rotation';
rowName{1,3} = 'La caméra1Matrice des paramètres internes';
rowName{1,4} = 'La caméra1Distorsion radiale';
rowName{1,5} = 'La caméra1Distorsion tangentielle';
rowName{1,6} = 'La caméra2Matrice des paramètres internes';
rowName{1,7} = 'La caméra2Distorsion radiale';
rowName{1,8} = 'La caméra2Distorsion tangentielle';
rowName{1,9} = 'La caméra1Vecteur de distorsion';
rowName{1,10} = 'La caméra2Vecteur de distorsion';
xlswrite('out.xlsx',rowName(1,1),1,'A1');
xlswrite('out.xlsx',rowName(1,2),1,'A2');
xlswrite('out.xlsx',rowName(1,3),1,'A5');
xlswrite('out.xlsx',rowName(1,4),1,'A8');
xlswrite('out.xlsx',rowName(1,5),1,'A9');
xlswrite('out.xlsx',rowName(1,6),1,'A10');
xlswrite('out.xlsx',rowName(1,7),1,'A13');
xlswrite('out.xlsx',rowName(1,8),1,'A14');
xlswrite('out.xlsx',rowName(1,9),1,'A15');
xlswrite('out.xlsx',rowName(1,10),1,'A16');
xlswrite('out.xlsx',stereoParams.TranslationOfCamera2,1,'B1'); % Matrice de traduction
xlswrite('out.xlsx',stereoParams.RotationOfCamera2.',1,'B2'); % Matrice de rotation
xlswrite('out.xlsx',stereoParams.CameraParameters1.IntrinsicMatrix.',1,'B5'); % La caméra1Matrice des paramètres internes
xlswrite('out.xlsx',stereoParams.CameraParameters1.RadialDistortion,1,'B8'); % La caméra1Distorsion radiale(1,2,5)
xlswrite('out.xlsx',stereoParams.CameraParameters1.TangentialDistortion,1,'B9'); % La caméra1Distorsion tangentielle(3,4)
xlswrite('out.xlsx',stereoParams.CameraParameters2.IntrinsicMatrix.',1,'B10'); % La caméra2Matrice des paramètres internes
xlswrite('out.xlsx',stereoParams.CameraParameters2.RadialDistortion,1,'B13'); % La caméra2Distorsion radiale(1,2,5)
xlswrite('out.xlsx',stereoParams.CameraParameters2.TangentialDistortion,1,'B14'); % La caméra2Distorsion tangentielle(3,4)
xlswrite('out.xlsx',[stereoParams.CameraParameters1.RadialDistortion(1:2), stereoParams.CameraParameters1.TangentialDistortion,...
stereoParams.CameraParameters1.RadialDistortion(3)],1,'B15'); % La caméra1Vecteur de distorsion
xlswrite('out.xlsx',[stereoParams.CameraParameters2.RadialDistortion(1:2), stereoParams.CameraParameters2.TangentialDistortion,...
stereoParams.CameraParameters2.RadialDistortion(3)],1,'B16'); % La caméra2Vecteur de distorsion
Python Correction binoculaire
Créer un nouveaupythonScript,Entrez le code suivant:
import cv2
import numpy as np
# Ginseng intraoculaire gauche
left_camera_matrix = np.array([[443.305413261701, 0., 473.481578105186],
[0., 445.685585080218, 481.627083907456],
[0., 0., 1.]])
# Distorsion oculaire gauche
#k1 k2 p1 p2 k3
left_distortion = np.array([[-0.261575534517449, 0.0622298171820726, 0., 0., -0.00638628534161724]])
# Ginseng intraoculaire droit
right_camera_matrix = np.array([[441.452616156177,0., 484.276702473006],
[0., 444.350924943458, 465.054536507021],
[0., 0., 1.]])
# Distorsion oculaire droite
right_distortion = np.array([[-0.257761221642368, 0.0592089672793365, 0., 0., -0.00576090991058531]])
# Matrice de rotation
R = np.matrix([
[0.999837210893742, -0.00477934325693493, 0.017398551383822],
[0.00490062605211919, 0.999963944810228, -0.0069349076319899],
[-0.0173647797717217, 0.00701904249875521, 0.999824583347439]
])
# Matrice de traduction
T = np.array([-71.0439056359403, -0.474467959947789, -0.27989811881883]) # Traduire le vecteur relationnel
size = (960, 960) # Taille de l'image
# Effectuer une correction stéréo
R1, R2, P1, P2, Q, validPixROI1, validPixROI2 = cv2.stereoRectify(left_camera_matrix, left_distortion,
right_camera_matrix, right_distortion, size, R,
T)
# Calcul des corrections map
left_map1, left_map2 = cv2.initUndistortRectifyMap(left_camera_matrix, left_distortion, R1, P1, size, cv2.CV_16SC2)
right_map1, right_map2 = cv2.initUndistortRectifyMap(right_camera_matrix, right_distortion, R2, P2, size, cv2.CV_16SC2)
Les paramètres doivent être remplacés par leurs propres paramètres réels .
Ensuite, écrivez un script et testez les résultats :
import cv2
import numpy as np
import camera_config
w = 1920
h = 960
cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, w)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, h)
key = ""
ww = int(w/2)
jiange = int(h/10)
while key!=27:
ret, img = cap.read()
if ret:
imgLeft = img[:, :ww]
imgRight = img[:, ww:w]
left_remap = cv2.remap(imgLeft, camera_config.left_map1, camera_config.left_map2, cv2.INTER_LINEAR)
right_remap = cv2.remap(imgRight, camera_config.right_map1, camera_config.right_map2, cv2.INTER_LINEAR)
out = np.hstack([left_remap, right_remap])
for i in range(10):
cv2.line(out, (0, jiange*i), (w, jiange*i), (255, 0, 0), 2)
cv2.imshow("frame", out)
key = cv2.waitKey(10)
cap.release()
cv2.destroyAllWindows()
Vous pouvez voir l'effet:
Avant correction( Très mauvais appareil photo ,Effet fisheye, Ne convient pas à une utilisation pratique ):
Après correction:
边栏推荐
- Thesis writing tip2
- Alpha Beta Pruning in Adversarial Search
- How to clean up logs on notebook computers to improve the response speed of web pages
- 【Wing Loss】《Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks》
- 【AutoAugment】《AutoAugment:Learning Augmentation Policies from Data》
- [tricks] whiteningbert: an easy unsupervised sentence embedding approach
- 【Mixed Pooling】《Mixed Pooling for Convolutional Neural Networks》
- Optimization method: meaning of common mathematical symbols
- Label propagation
- Solve the problem of latex picture floating
猜你喜欢
Common CNN network innovations
【Hide-and-Seek】《Hide-and-Seek: A Data Augmentation Technique for Weakly-Supervised Localization xxx》
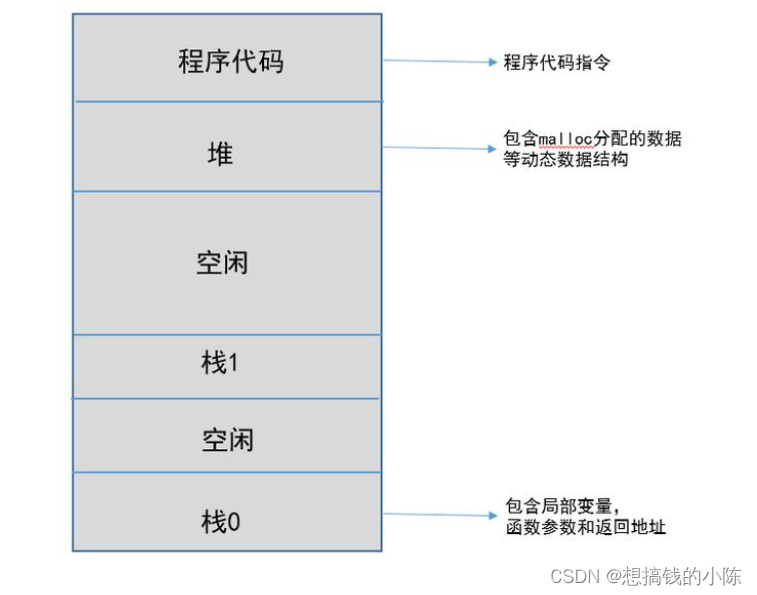
程序的内存模型
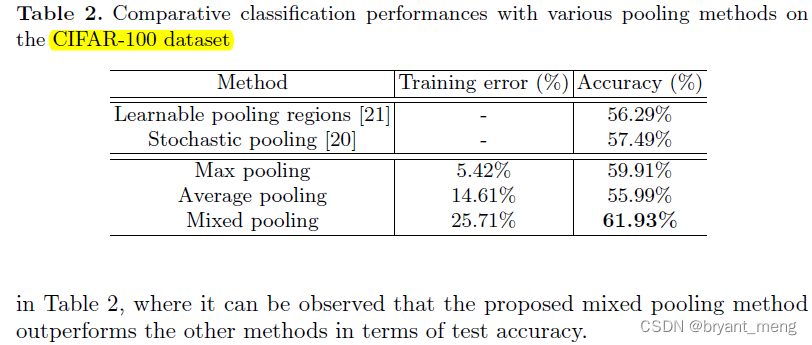
【Mixed Pooling】《Mixed Pooling for Convolutional Neural Networks》
![[model distillation] tinybert: distilling Bert for natural language understanding](/img/c1/e1c1a3cf039c4df1b59ef4b4afbcb2.png)
[model distillation] tinybert: distilling Bert for natural language understanding
常见CNN网络创新点
Implementation of yolov5 single image detection based on onnxruntime
Mmdetection installation problem

【DIoU】《Distance-IoU Loss:Faster and Better Learning for Bounding Box Regression》
Using compose to realize visible scrollbar
随机推荐
[introduction to information retrieval] Chapter II vocabulary dictionary and inverted record table
【AutoAugment】《AutoAugment:Learning Augmentation Policies from Data》
【Paper Reading】
聊天中文语料库对比(附上各资源链接)
【MnasNet】《MnasNet:Platform-Aware Neural Architecture Search for Mobile》
[paper introduction] r-drop: regulated dropout for neural networks
[mixup] mixup: Beyond Imperial Risk Minimization
[CVPR‘22 Oral2] TAN: Temporal Alignment Networks for Long-term Video
yolov3训练自己的数据集(MMDetection)
【Hide-and-Seek】《Hide-and-Seek: A Data Augmentation Technique for Weakly-Supervised Localization xxx》
How to turn on night mode on laptop
conda常用命令
ABM thesis translation
【Mixup】《Mixup:Beyond Empirical Risk Minimization》
Faster-ILOD、maskrcnn_ Benchmark trains its own VOC data set and problem summary
Faster-ILOD、maskrcnn_benchmark安装过程及遇到问题
ModuleNotFoundError: No module named ‘pytest‘
CPU register
Execution of procedures
Implement interface Iterable & lt; T>