当前位置:网站首页>Example of implementing web server with stm32+enc28j60+uip protocol stack
Example of implementing web server with stm32+enc28j60+uip protocol stack
2022-07-06 18:34:00 【Hua Weiyun】
One 、 Introduction to the environment
MCU: STM32F103ZET6
network card : ENC28J60
Protocol stack : UIP
Development software : Keil5
Two 、 Function is introduced
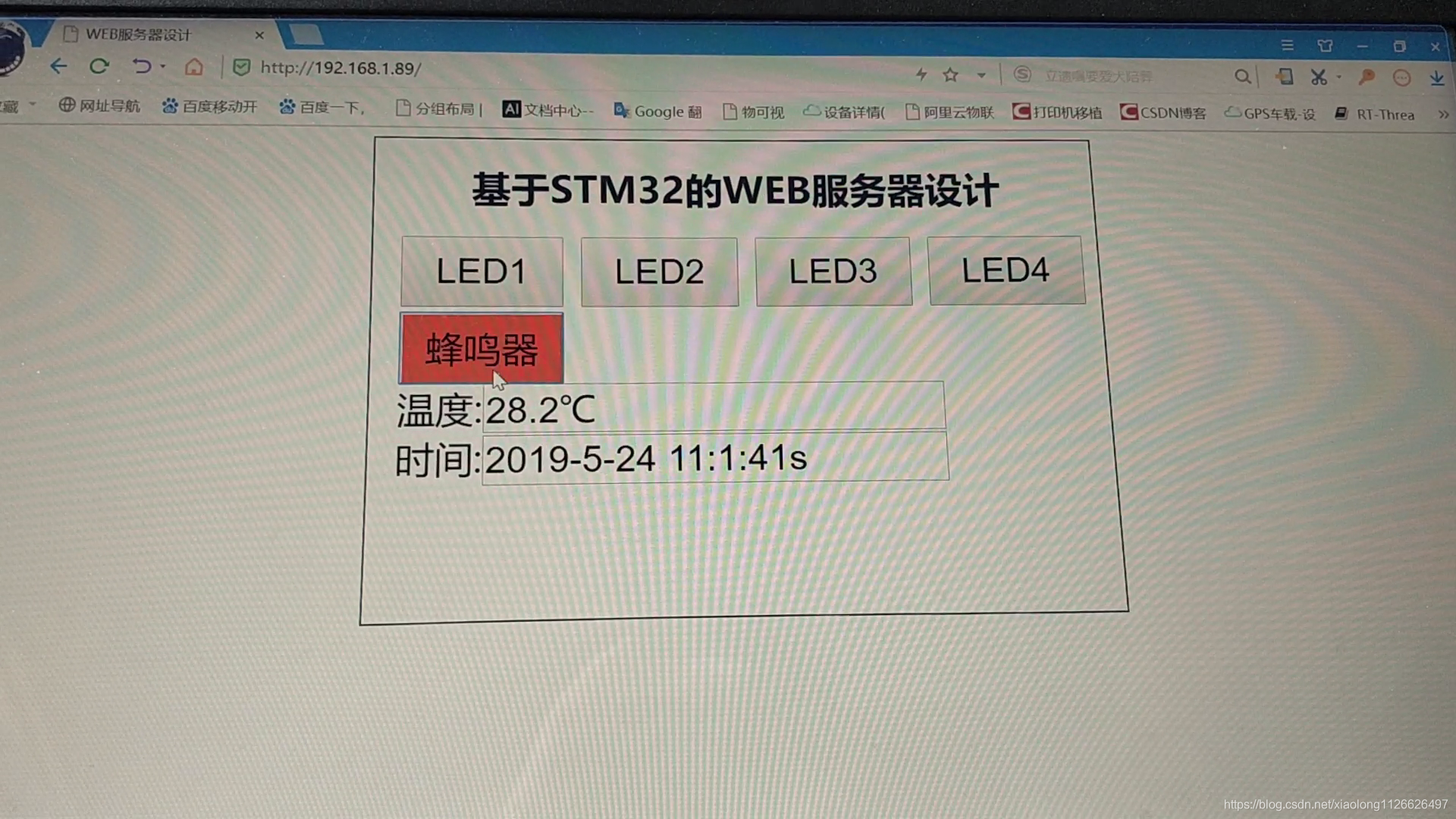
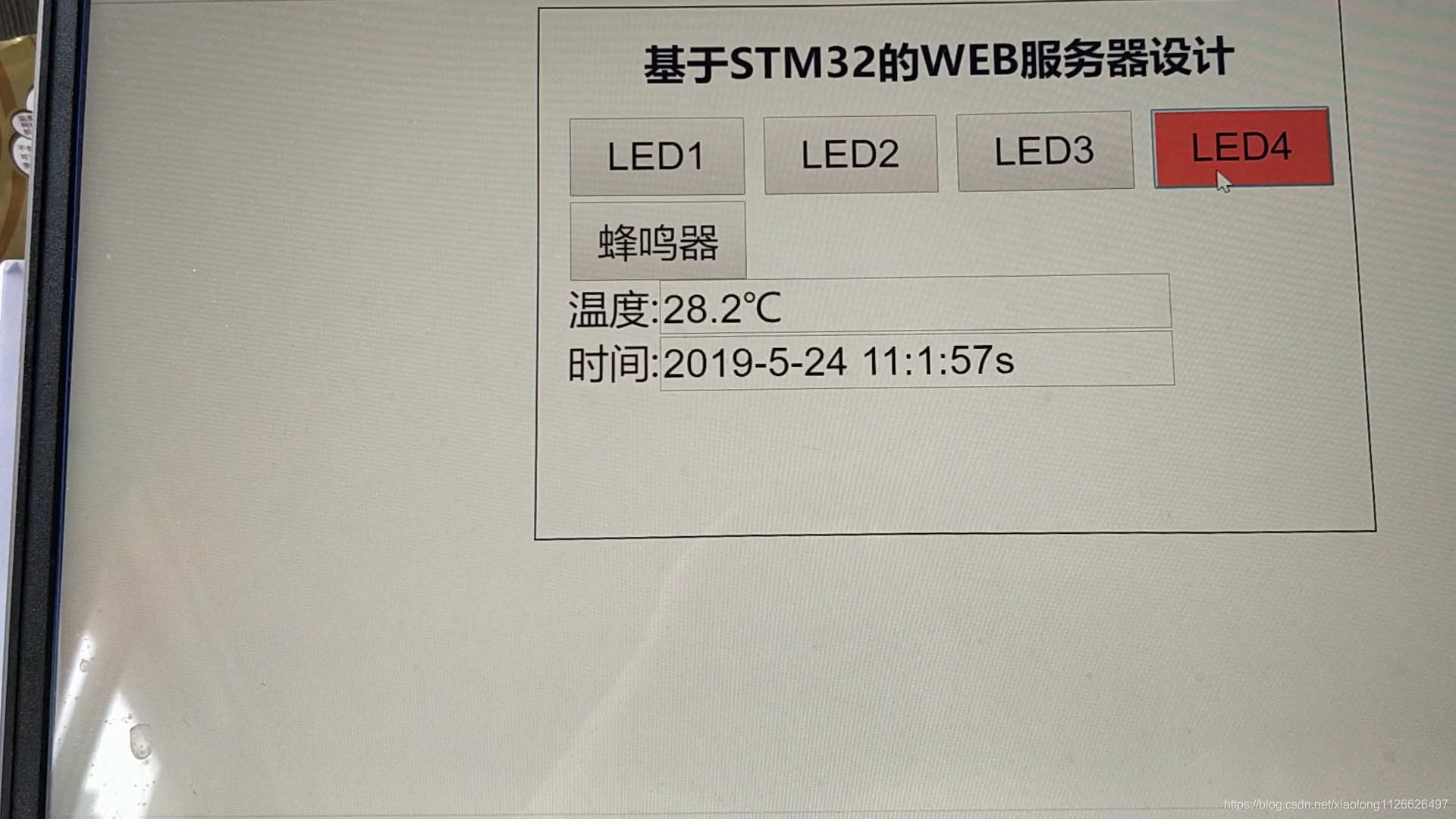
STM32 control ENC28J60+UIP Protocol stack creation TCP The server (WEB The server ), Support browser access to complete data transmission . The browser can display the temperature in real time 、 Time 、 Can be controlled STM32 On the development board LED The lamp 、 Buzzer .

 edit
edit
 edit
edit
 edit
edit
 edit
edit
 edit
edit
 edit
edit
3、 ... and 、 ENC28J60 Chip introduction
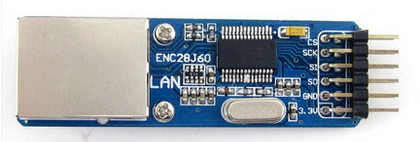
ENC28J60 Serial peripheral interface with industry standard (Serial Peripheral Interface,SPI) Independent Ethernet controller . It can be used as any equipped with SPI Ethernet interface of controller .ENC28J60 accord with IEEE 802.3 All specifications of , A series of packet filtering mechanisms are adopted to restrict incoming packets . It also provides an internal DMA modular , To achieve fast data throughput and hardware support IP Check and calculate . Communication with the main controller is through two interrupt pins and SPI Realization , The data transmission rate is as high as 10 Mb/s. Two dedicated pins are used for connection LED, Indication of network activity status .ENC28J60 There's only... In all 28 foot , Provide QFN/TF.
ENC28J60 The main features are as follows :
- compatible IEEE802.3 Ethernet controller based on Protocol
- Integrate MAC and 10 BASE-T The physical layer
- Full duplex and half duplex modes are supported
- Programmable automatic retransmission in case of data conflict
- SPI Interface speed up to 10Mbps
- 8K Data receiving and sending dual ports RAM
- Internal for fast data movement DMA controller
- Configurable receive and send buffer size
- Two programmable LED Output
- belt 7 Two interrupt pins of an interrupt source
- TTL Level input
- Multiple packages available :SOIC/SSOP/SPDIP/QFN etc. .
ENC28J60 It consists of seven main functional modules :
1) SPI Interface , Act as master controller and ENC28J60 The communication channel between them .
2) Control register , For control and monitoring ENC28J60.
3) Dual port RAM Buffer , Used to receive and send packets .
4) Optimizer , When DMA、 When the sending and receiving module sends a request RAM Buffer access control .
5) Bus interface , Yes SPI The received data and commands are parsed .
6) MAC(Medium Access Control) modular , Achieve compliance IEEE 802.3 The standard MAC Logic .
7) PHY( The physical layer ) modular , Encode and decode the analog data on the twisted pair .
ENC28J60 Other support modules are also included , Such as oscillator 、 On chip regulator 、 Level converter ( Provide acceptable 5V Of voltage I/O Pin ) And system control logic .
 edit
edit
 edit
edit
Four 、UIP brief introduction
uIP By the Swedish Academy of Computer Science ( Network embedded systems group ) Of Adam Dunkels Development . Its source code is from C language Speech compilation , And completely open ,uIP The latest version of is 1.0 edition . uIP The protocol stack removes the complete TCP/IP Functions not commonly used in , Simplify the communication process , But network communication is preserved Protocols that must be used , The design focuses on IP/TCP/ICMP/UDP/ARP These network layer and transport layer protocols , Guarantee The versatility of its code and the stability of its structure .
Official website :https://github.com/adamdunkels/uipbecause uIP The protocol stack is specially designed for embedded systems , Therefore, it also has the following superior functions :
1) Very little code , Its protocol stack code is less than 6K, Easy to read and transplant .
2) The amount of memory used is very small ,RAM Occupy only a few hundred bytes .
3) Its hardware processing layer 、 The protocol stack layer and the application layer share a global cache , There is no copy of data , And send And receive depend on this cache , It greatly saves space and time .
4) Support multiple active connections and passive connections concurrently .
5) Its source code provides a set of example programs :web The server ,web client , Email sender (SMTP customer Home end ),Telnet The server , DNS Host name resolver, etc . Strong commonality , Transplantation can pass without modification .
6) The data processing adopts the round robin mechanism , No operating system support . because uIP Less need for resources and easy transplantation , Most of 8 Bit microcontrollers have been used uIP Protocol stack , And many famous embedded products and projects ( Like a satellite ,Cisco Router , Wireless sensor networks ) It's all in use uIP Protocol stack . uIP Equivalent to a code base , Through a series of functions to achieve communication with the underlying hardware and high-level applications , about For the whole system, its internal protocol group is transparent , Thus, the universality of the protocol is increased .
uIP The interface functions provided are :
1. initialization uIP Protocol stack :uip_init()
2. Process input packages :uip_input()
3. Handle cycle timing events :uip_periodic()
4. Start listening to port :uip_listen()
5. Connect to remote host :uip_connect()
6. Connection request received :uip_connected()
7. Active close connection :uip_close()
8. The connection is closed :uip_closed()
9. The sent data is answered :uip_acked()
10. Send data on the current connection :uip_send()
11. New data received on the current connection :uip_newdata()
12. Tell the other party to stop connecting :uip_stop()
13. The connection was terminated unexpectedly :uip_aborted()
 edit
edit
5、 ... and 、 Core code
5.1 main.c
#include "stm32f10x.h"#include "led.h"#include "delay.h"#include "key.h"#include "usart.h"#include <string.h>#include <stdio.h>#include "enc28j60.h"#include "time.h"#include "uip.h"#include "uip_arp.h"#include "tapdev.h"#include "timer.h"#include "uip-conf.h"#include "httpd.h"#include "ds18b20.h"#include "rtc.h"void uip_EventPoll(void); // Event handler #define UIP_BUF ((struct uip_eth_hdr *)&uip_buf[0])/* When Uip Received Uip Receive the data transmitted to the bottom , Call the received data http_appcall(), Pass to Webserver Handle , Re pass handle_connection() Call it successively handle_input() Functions and handle_output() function handle_input() The main function is to analyze http Data flow : Get the requested path 、 Resolve the requested file name . And then call the function. handle_output Search the corresponding file , Send to browser , To complete the interaction . Be careful : Google browser is the best browser , Otherwise, the access will fail !*/int main(){ u8 key; u32 tcnt=0; uip_ipaddr_t ipaddr; // preservation IP Address information BeepInit(); // Buzzer initialization LedInit(); //LED Lamp initialization UsartInit(USART1,72,115200); KeyInit(); // Key initialization TimerInit(TIM6,72,10000); // Timer initialization , DS18B20_Init(); RTC_Init(); SET_RTC_TIME(2019,5,24,10,58,20); printf(" The serial port works normally !\r\n"); while(tapdev_init()) // initialization ENC28J60 error { printf("ENC28J60 Init Error!\r\n"); Delay72M_Ms(500); } printf("ENC28J60 Successful initialization !\r\n"); uip_init(); //uIP initialization uip_ipaddr(ipaddr, 192,168,1,89); // Fill the development board IP Address uip_sethostaddr(ipaddr); // Set up the development board IP Address uip_ipaddr(ipaddr, 192,168,1,1); // Fill in the gateway address of the development board uip_setdraddr(ipaddr); // Setting development board gateway IP Address ( It's actually your router IP Address ) uip_ipaddr(ipaddr, 255,255,255,0); // Fill in the development board netmask uip_setnetmask(ipaddr); // Fill in the development board netmask httpd_init(); // establish WEB The server , Set listening port while(1) { uip_EventPoll(); // Polling processing network data }}/* The functionality :uip Event handler , You need to insert this function into the user main loop , Cycle call */void uip_EventPoll(void){ u8 i; static struct timer arp_timer; // Define timer static u8 timer_ok=0; if(timer_ok==0)// Initialize only once { timer_ok = 1; timer_set(&arp_timer,CLOCK_SECOND*10); // establish 1 individual 10 Second timer } uip_len=tapdev_read(); // Read a from the network device IP package , Get the data length .uip_len stay uip.c In the definition of if(uip_len>0) // There's data { // Handle IP Data packets ( Only those who pass the verification IP Packets will be received ) if(UIP_BUF->type == htons(UIP_ETHTYPE_IP))// Whether it is IP package ? { uip_arp_ipin(); // Remove the Ethernet head structure , to update ARP surface uip_input(); //IP Package processing // When the above function is executed , If you need to send data , Then global variables uip_len > 0 // The data to be sent is uip_buf, The length is uip_len ( This is a 2 Global variables ) if(uip_len>0)// Need to respond to data { uip_arp_out();// Add Ethernet head structure , It may be necessary to construct ARP request tapdev_send();// Send data to Ethernet } } else if (UIP_BUF->type==htons(UIP_ETHTYPE_ARP))// Handle arp message , Whether it is ARP Request package ? { uip_arp_arpin(); // When the above function is executed , If you need to send data , Then global variables uip_len>0 // The data to be sent is uip_buf, The length is uip_len( This is a 2 Global variables ) if(uip_len>0)tapdev_send();// You need to send data , Through tapdev_send send out } } // Take turns dealing with each TCP Connect , UIP_CONNS The default is 40 individual for(i=0; i<UIP_CONNS; i++) { uip_periodic(i); // Handle TCP Communication event // When the above function is executed , If you need to send data , Then global variables uip_len>0 // The data to be sent is uip_buf, The length is uip_len ( This is a 2 Global variables ) if(uip_len>0) { uip_arp_out();// Add Ethernet head structure , It may be necessary to construct ARP request tapdev_send();// Send data to Ethernet } } // every other 10 Second call 1 Time ARP Timer Functions For periodic ARP Handle ,ARP surface 10 Seconds to update , Old entries will be discarded if(timer_expired(&arp_timer)) { timer_reset(&arp_timer); uip_arp_timer(); }}
5.2 enc28j60.c
#include "delay.h"#include <stdio.h>#include "enc28j60.h" /* Here are ENC28J60 Driver migration interface :MISO--->PA6---- Host input MOSI--->PA7---- Host output SCLK--->PA5---- Clock signal CS----->PA4---- Chip selection RESET-->PG15--- Reset */#define ENC28J60_CS PAout(4) //ENC28J60 Piece of optional signal #define ENC28J60_RST PGout(15) //ENC28J60 Reset signal #define ENC28J60_MOSI PAout(7) // Output #define ENC28J60_MISO PAin(6) // Input #define ENC28J60_SCLK PAout(5) // Clock line static u8 ENC28J60BANK;static u32 NextPacketPtr;/* The functionality : Bottom SPI The interface sends and receives a byte saying bright : simulation SPI sequential ,ENC28J60 The idle level of the clock line is low , Collect data on the first falling edge */u8 ENC28J60_SPI_ReadWriteOneByte(u8 tx_data){ u16 cnt=0; while((SPI1->SR&1<<1)==0) // The waiting area is empty -- Waiting to send buffer is empty { cnt++; if(cnt>=65530)return 0; // Timeout exit u16=2 Bytes } SPI1->DR=tx_data; // Send a byte cnt=0; while((SPI1->SR&1<<0)==0) // Waiting for one to be received byte { cnt++; if(cnt>=65530)return 0; // Timeout exit } return SPI1->DR; // Return the received data }/* The functionality : Reset ENC28J60, Include SPI initialization /IO Initialization etc. MISO--->PA6---- Host input MOSI--->PA7---- Host output SCLK--->PA5---- Clock signal CS----->PA4---- Chip selection RESET-->PG15--- Reset */void ENC28J60_Reset(void){/* Turn on the clock */ RCC->APB2ENR|=1<<12; // Turn on SPI1 The clock RCC->APB2ENR|=1<<2; //PA GPIOA->CRL&=0X0000FFFF; // Clear register GPIOA->CRL|=0XB8B30000; GPIOA->ODR|=0XF<<4; // Pull up -- Output high level GPIOA->ODR&=~(1<<5); RCC->APB2ENR|=1<<8; //2 3 4 5 6 7 8 GPIOG->CRH&=0x0FFFFFFF; GPIOG->CRH|=0x30000000; /*SPI2 Basic configuration */ SPI1->CR1=0X0; // Clear register SPI1->CR1|=0<<15; // choice “ Two line, two-way ” Pattern SPI1->CR1|=0<<11; // Use 8 Send in bit data frame format / receive ; SPI1->CR1|=0<<10; // full duplex ( Send and receive ); SPI1->CR1|=1<<9; // Enable software slave device management SPI1->CR1|=1<<8; //NSS SPI1->CR1|=0<<7; // The frame format , Send the high bit first SPI1->CR1|=0x1<<3;// When the bus frequency is 36MHZ when ,SPI Speed is 18MHZ, High speed . SPI1->CR1|=1<<2; // Configure the master device SPI1->CR1|=1<<1; // When idle , SCK Keep it high . SPI1->CR1|=1<<0; // Data sampling starts from the edge of the second clock . SPI1->CR1|=1<<6; // Turn on SPI equipment . // in the light of ENC28J60 Characteristics (SCK Idle is low ) modify SPI Set up SPI1->CR1&=~(1<<6); //SPI Equipment failure SPI1->CR1&=~(1<<1); // In idle mode SCK by 0 CPOL=0 SPI1->CR1&=~(1<<0); // Data sampling from 1 Start at the edge of time ,CPHA=0 SPI1->CR1|=1<<6; //SPI Equipment enabling ENC28J60_RST=0; // Reset ENC28J60 DelayMs(10); ENC28J60_RST=1; // Reset end DelayMs(10); }/* The functionality : Read ENC28J60 register ( With opcode ) ginseng Count :op: opcode addr: Register address / Parameters return return value : Data read */u8 ENC28J60_Read_Op(u8 op,u8 addr){ u8 dat=0; ENC28J60_CS=0; dat=op|(addr&ADDR_MASK); ENC28J60_SPI_ReadWriteOneByte(dat); dat=ENC28J60_SPI_ReadWriteOneByte(0xFF); // If it's read MAC/MII register , Then the data read for the second time is correct , See manual 29 page if(addr&0x80)dat=ENC28J60_SPI_ReadWriteOneByte(0xFF); ENC28J60_CS=1; return dat;}/* The functionality : Read ENC28J60 register ( With opcode ) ginseng Count : op: opcode addr: Register address data: Parameters */void ENC28J60_Write_Op(u8 op,u8 addr,u8 data){ u8 dat = 0; ENC28J60_CS=0; dat=op|(addr&ADDR_MASK); ENC28J60_SPI_ReadWriteOneByte(dat); ENC28J60_SPI_ReadWriteOneByte(data); ENC28J60_CS=1;}/* The functionality : Read ENC28J60 Receive cached data parameters Count : len: The length of data to read data: Output data buffer ( Automatically add terminator at the end )*/void ENC28J60_Read_Buf(u32 len,u8* data){ ENC28J60_CS=0; ENC28J60_SPI_ReadWriteOneByte(ENC28J60_READ_BUF_MEM); while(len) { len--; *data=(u8)ENC28J60_SPI_ReadWriteOneByte(0); data++; } *data='\0'; ENC28J60_CS=1;}/* The functionality : towards ENC28J60 Write send cache data parameters Count : len: The length of data to write data: Data cache */void ENC28J60_Write_Buf(u32 len,u8* data){ ENC28J60_CS=0; ENC28J60_SPI_ReadWriteOneByte(ENC28J60_WRITE_BUF_MEM); while(len) { len--; ENC28J60_SPI_ReadWriteOneByte(*data); data++; } ENC28J60_CS=1;}/* The functionality : Set up ENC28J60 register Bank ginseng Count : ban: To set up bank*/void ENC28J60_Set_Bank(u8 bank){ if((bank&BANK_MASK)!=ENC28J60BANK)// And the current bank When they disagree , Only set { ENC28J60_Write_Op(ENC28J60_BIT_FIELD_CLR,ECON1,(ECON1_BSEL1|ECON1_BSEL0)); ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON1,(bank&BANK_MASK)>>5); ENC28J60BANK=(bank&BANK_MASK); }}/* The functionality : Read ENC28J60 Specify register parameters Count :addr: Register address returns return value : Data read */u8 ENC28J60_Read(u8 addr){ ENC28J60_Set_Bank(addr);// Set up BANK return ENC28J60_Read_Op(ENC28J60_READ_CTRL_REG,addr);}/* The functionality : towards ENC28J60 Specify register write data parameters Count : addr: Register address data: The data to be written */void ENC28J60_Write(u8 addr,u8 data){ ENC28J60_Set_Bank(addr); ENC28J60_Write_Op(ENC28J60_WRITE_CTRL_REG,addr,data);}/* The functionality : towards ENC28J60 Of PHY Register writes data parameters Count : addr: Register address data: The data to be written */void ENC28J60_PHY_Write(u8 addr,u32 data){ u16 retry=0; ENC28J60_Write(MIREGADR,addr); // Set up PHY Register address ENC28J60_Write(MIWRL,data); // Write data ENC28J60_Write(MIWRH,data>>8); while((ENC28J60_Read(MISTAT)&MISTAT_BUSY)&&retry<0XFFF)retry++;// Waiting to write PHY end }/* The functionality : initialization ENC28J60 ginseng Count :macaddr:MAC Address return return value : 0, Successful initialization ; 1, initialization failed ;*/u8 ENC28J60_Init(u8* macaddr){ u16 retry=0; ENC28J60_Reset(); // Reset the underlying pin interface ENC28J60_Write_Op(ENC28J60_SOFT_RESET,0,ENC28J60_SOFT_RESET);// Software reset while(!(ENC28J60_Read(ESTAT)&ESTAT_CLKRDY)&&retry<500)// Wait for the clock to stabilize { retry++; DelayMs(1); }; if(retry>=500)return 1;//ENC28J60 initialization failed // do bank 0 stuff // initialize receive buffer // 16-bit transfers,must write low byte first // set receive buffer start address Set receive buffer address 8K Byte capacity NextPacketPtr=RXSTART_INIT; // Rx start // The receive buffer is a loop managed by hardware FIFO Buffer composition . // Register pair ERXSTH:ERXSTL and ERXNDH:ERXNDL do // For the pointer , Defines the capacity of the buffer and its location in memory . //ERXST and ERXND The bytes pointed to are contained in FIFO In buffer . // When receiving data bytes from the Ethernet interface , These bytes are written sequentially // Receive buffer . But when written by ERXND Point to the storage unit // after , The hardware will automatically write the next byte received to ERXST Point to // The storage unit of . Therefore, the receiving hardware will not write FIFO Orders other than // element . // Set receive start byte ENC28J60_Write(ERXSTL,RXSTART_INIT&0xFF); ENC28J60_Write(ERXSTH,RXSTART_INIT>>8); //ERXWRPTH:ERXWRPTL Register definition hardware FIFO in // Where does the receive byte write . The pointer is read-only , Zai Cheng // After receiving a packet , The hardware automatically updates the pointer . The pointer can // Used to judge FIFO Size of remaining space in 8K-1500. // Set receive read pointer byte ENC28J60_Write(ERXRDPTL,RXSTART_INIT&0xFF); ENC28J60_Write(ERXRDPTH,RXSTART_INIT>>8); // Set receive end byte ENC28J60_Write(ERXNDL,RXSTOP_INIT&0xFF); ENC28J60_Write(ERXNDH,RXSTOP_INIT>>8); // Set send start byte ENC28J60_Write(ETXSTL,TXSTART_INIT&0xFF); ENC28J60_Write(ETXSTH,TXSTART_INIT>>8); // Set send end byte ENC28J60_Write(ETXNDL,TXSTOP_INIT&0xFF); ENC28J60_Write(ETXNDH,TXSTOP_INIT>>8); // do bank 1 stuff,packet filter: // For broadcast packets we allow only ARP packtets // All other packets should be unicast only for our mac (MAADR) // // The pattern to match on is therefore // Type ETH.DST // ARP BROADCAST // 06 08 -- ff ff ff ff ff ff -> ip checksum for theses bytes=f7f9 // in binary these poitions are:11 0000 0011 1111 // This is hex 303F->EPMM0=0x3f,EPMM1=0x30 // Receive filter //UCEN: Unicast filter enable bit // When ANDOR = 1 when : //1 = Destination address and local address MAC Packets with mismatched addresses will be discarded //0 = Prohibit filter // When ANDOR = 0 when : //1 = Destination address and local address MAC Packets with matching addresses will be accepted //0 = Prohibit filter //CRCEN: Rear filter CRC Check enable bit //1 = all CRC Invalid packets will be discarded //0 = Don't consider CRC Whether it works //PMEN: Format matching filter enable bit // When ANDOR = 1 when : //1 = The packet must meet the format matching criteria , Otherwise it will be discarded //0 = Prohibit filter // When ANDOR = 0 when : //1 = Packets that meet the format matching criteria will be accepted //0 = Prohibit filter ENC28J60_Write(ERXFCON,ERXFCON_UCEN|ERXFCON_CRCEN|ERXFCON_PMEN); ENC28J60_Write(EPMM0,0x3f); ENC28J60_Write(EPMM1,0x30); ENC28J60_Write(EPMCSL,0xf9); ENC28J60_Write(EPMCSH,0xf7); // do bank 2 stuff // enable MAC receive //bit 0 MARXEN:MAC Receive enable bit //1 = allow MAC Receive packets //0 = Prohibit packet reception //bit 3 TXPAUS: Pause control frame transmission enable bit //1 = allow MAC Send pause control frame ( Used for flow control in full duplex mode ) //0 = Prohibit pause frame transmission //bit 2 RXPAUS: Pause control frame reception enable bit //1 = When a pause control frame is received , Prohibit sending ( Normal operation ) //0 = Ignore the received pause control frame ENC28J60_Write(MACON1,MACON1_MARXEN|MACON1_TXPAUS|MACON1_RXPAUS); // bring MAC out of reset // take MACON2 Medium MARST A reset , send MAC Exit reset state . ENC28J60_Write(MACON2,0x00); // enable automatic padding to 60bytes and CRC operations //bit 7-5 PADCFG2:PACDFG0: Auto fill and CRC Configuration bit //111 = use 0 Fill all short frames to 64 Byte length , And add a valid CRC //110 = Do not automatically fill short frames //101 = MAC Automatic detection with 8100h Of the type field VLAN Protocol frame , And automatically fill in 64 Byte length . If you don't // yes VLAN frame , Fill to 60 Byte length . After filling, a valid is added CRC //100 = Do not automatically fill short frames //011 = use 0 Fill all short frames to 64 Byte length , And add a valid CRC //010 = Do not automatically fill short frames //001 = use 0 Fill all short frames to 60 Byte length , And add a valid CRC //000 = Do not automatically fill short frames //bit 4 TXCRCEN: send out CRC Enable bit //1 = No matter PADCFG how ,MAC A valid will be appended at the end of the transmitted frame CRC. If PADCFG Required // Append valid CRC, You have to TXCRCEN Set up 1. //0 = MAC No append CRC. Check at the end 4 Bytes , If not valid CRC Report to send status vector . //bit 0 FULDPX:MAC Full duplex enable bit //1 = MAC Working in full duplex mode . PHCON1.PDPXMD Bit must be set to 1. //0 = MAC Working in half duplex mode . PHCON1.PDPXMD Bit must be cleared . ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,MACON3,MACON3_PADCFG0|MACON3_TXCRCEN|MACON3_FRMLNEN|MACON3_FULDPX); // set inter-frame gap (non-back-to-back) // Configure the low byte of the non back to back inter knapsack interval register //MAIPGL. Most applications use 12h Program the register . // If half duplex mode is used , The spacing between non back to back backpacks shall be programmed // High byte of register MAIPGH. Most applications use 0Ch // Program the register . ENC28J60_Write(MAIPGL,0x12); ENC28J60_Write(MAIPGH,0x0C); // set inter-frame gap (back-to-back) // Configure the back-to-back interval register MABBIPG. When using // In full duplex mode , Most applications use 15h Program the register // device , When half duplex mode is used 12h Programming . ENC28J60_Write(MABBIPG,0x15); // Set the maximum packet size which the controller will accept // Do not send packets longer than MAX_FRAMELEN: // Maximum frame length 1500 ENC28J60_Write(MAMXFLL,MAX_FRAMELEN&0xFF); ENC28J60_Write(MAMXFLH,MAX_FRAMELEN>>8); // do bank 3 stuff // write MAC address // NOTE: MAC address in ENC28J60 is byte-backward // Set up MAC Address ENC28J60_Write(MAADR5,macaddr[0]); ENC28J60_Write(MAADR4,macaddr[1]); ENC28J60_Write(MAADR3,macaddr[2]); ENC28J60_Write(MAADR2,macaddr[3]); ENC28J60_Write(MAADR1,macaddr[4]); ENC28J60_Write(MAADR0,macaddr[5]); // To configure PHY Full duplex LEDB Pull current ENC28J60_PHY_Write(PHCON1,PHCON1_PDPXMD); // no loopback of transmitted frames No loopback //HDLDIS:PHY Half duplex loopback inhibit bit // When PHCON1.PDPXMD = 1 or PHCON1.PLOOPBK = 1 when : // This bit can be ignored . // When PHCON1.PDPXMD = 0 And PHCON1.PLOOPBK = 0 when : //1 = The data to be sent is sent only through the twisted pair interface //0 = The data to be sent is looped back MAC And send it through the twisted pair interface ENC28J60_PHY_Write(PHCON2,PHCON2_HDLDIS); // switch to bank 0 //ECON1 register // register 3-1 As shown in the for ECON1 register , It's used to control //ENC28J60 The main function of . ECON1 Receive enable included in 、 Hair // Send request 、DMA Control and store selection bits . ENC28J60_Set_Bank(ECON1); // enable interrutps //EIE: Ethernet interrupt enable register //bit 7 INTIE: overall situation INT Interrupt allow bit //1 = Allow interrupt event driven INT Pin //0 = Prohibit all INT Pin activity ( The pin is always driven high ) //bit 6 PKTIE: Received packet pending interrupt enable bit //1 = Allow receive packet pending interrupt //0 = Prohibit receiving packet pending interrupt ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,EIE,EIE_INTIE|EIE_PKTIE); // enable packet reception //bit 2 RXEN: Receive enable bit //1 = Packets passing through the current filter will be written to the receive buffer //0 = Ignore all received packets ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON1,ECON1_RXEN); if(ENC28J60_Read(MAADR5)== macaddr[0])return 0;// Successful initialization else return 1; }/* The functionality : Read EREVID ginseng Count :*/u8 ENC28J60_Get_EREVID(void){ // stay EREVID Version information is also stored in the . EREVID Is a read-only controller // System register , Contains a 5 Bit identifier , Used to identify device specific silicon wafers // Version number of return ENC28J60_Read(EREVID);}/* The functionality : adopt ENC28J60 Send packets to network parameters Count : len : Packet size packet: Data packets */void ENC28J60_Packet_Send(u32 len,u8* packet){ // Set send buffer address write pointer entry ENC28J60_Write(EWRPTL,TXSTART_INIT&0xFF); ENC28J60_Write(EWRPTH,TXSTART_INIT>>8); // Set up TXND The pointer , To correspond to the given packet size ENC28J60_Write(ETXNDL,(TXSTART_INIT+len)&0xFF); ENC28J60_Write(ETXNDH,(TXSTART_INIT+len)>>8); // Write control bytes per packet (0x00 Said the use of macon3 Set up ) ENC28J60_Write_Op(ENC28J60_WRITE_BUF_MEM,0,0x00); // Copy packets to send buffer //printf("len:%d\r\n",len); // Monitor the length of transmitted data ENC28J60_Write_Buf(len,packet); // Send data to the network ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON1,ECON1_TXRTS); // Reset sending logic problem . See Rev. B4 Silicon Errata point 12. if((ENC28J60_Read(EIR)&EIR_TXERIF))ENC28J60_Write_Op(ENC28J60_BIT_FIELD_CLR,ECON1,ECON1_TXRTS);}/* The functionality : Get a packet content function parameter from the network : maxlen: Maximum allowable packet receiving length packet: Packet buffer returned return value : Received packet length ( byte ) */u32 ENC28J60_Packet_Receive(u32 maxlen,u8* packet){ u32 rxstat; u32 len; if(ENC28J60_Read(EPKTCNT)==0)return 0; // Received packet ? // Set receive buffer read pointer ENC28J60_Write(ERDPTL,(NextPacketPtr)); ENC28J60_Write(ERDPTH,(NextPacketPtr)>>8); // Read the pointer to the next package NextPacketPtr=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0); NextPacketPtr|=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0)<<8; // Read packet length len=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0); len|=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0)<<8; len-=4; // Get rid of CRC Count // Read receive status rxstat=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0); rxstat|=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0)<<8; // Limit receive length if (len>maxlen-1)len=maxlen-1; // Check CRC And symbol errors // ERXFCON.CRCEN For default settings , Generally, we don't need to check . if((rxstat&0x80)==0)len=0;// Invalid else ENC28J60_Read_Buf(len,packet);// Copy packets from receive buffer //RX The read pointer moves to the start of the next received packet // And release the memory we just read out ENC28J60_Write(ERXRDPTL,(NextPacketPtr)); ENC28J60_Write(ERXRDPTH,(NextPacketPtr)>>8); // Decrementing the packet counter indicates that we have got the packet ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON2,ECON2_PKTDEC); return(len);}
5.3 enc28j60.h
#include "sys.h" #ifndef __ENC28J60_H#define __ENC28J60_H #include "stm32f10x.h"////////////////////////////////////////////////////////////////////////////////////////////////////////////////// ENC28J60 Control Registers// Control register definitions are a combination of address,// bank number, and Ethernet/MAC/PHY indicator bits.// - Register address (bits 0-4)// - Bank number (bits 5-6)// - MAC/PHY indicator (bit 7)#define ADDR_MASK 0x1F#define BANK_MASK 0x60#define SPRD_MASK 0x80// All-bank registers#define EIE 0x1B#define EIR 0x1C#define ESTAT 0x1D#define ECON2 0x1E#define ECON1 0x1F// Bank 0 registers#define ERDPTL (0x00|0x00)#define ERDPTH (0x01|0x00)#define EWRPTL (0x02|0x00)#define EWRPTH (0x03|0x00)#define ETXSTL (0x04|0x00)#define ETXSTH (0x05|0x00)#define ETXNDL (0x06|0x00)#define ETXNDH (0x07|0x00)#define ERXSTL (0x08|0x00)#define ERXSTH (0x09|0x00)#define ERXNDL (0x0A|0x00)#define ERXNDH (0x0B|0x00)//ERXWRPTH:ERXWRPTL Register definition hardware FIFO in // Where does the receive byte write . The pointer is read-only , Zai Cheng // After receiving a packet , The hardware automatically updates the pointer . The pointer can // Used to judge FIFO Size of remaining space in .#define ERXRDPTL (0x0C|0x00)#define ERXRDPTH (0x0D|0x00)#define ERXWRPTL (0x0E|0x00)#define ERXWRPTH (0x0F|0x00)#define EDMASTL (0x10|0x00)#define EDMASTH (0x11|0x00)#define EDMANDL (0x12|0x00)#define EDMANDH (0x13|0x00)#define EDMADSTL (0x14|0x00)#define EDMADSTH (0x15|0x00)#define EDMACSL (0x16|0x00)#define EDMACSH (0x17|0x00)// Bank 1 registers#define EHT0 (0x00|0x20)#define EHT1 (0x01|0x20)#define EHT2 (0x02|0x20)#define EHT3 (0x03|0x20)#define EHT4 (0x04|0x20)#define EHT5 (0x05|0x20)#define EHT6 (0x06|0x20)#define EHT7 (0x07|0x20)#define EPMM0 (0x08|0x20)#define EPMM1 (0x09|0x20)#define EPMM2 (0x0A|0x20)#define EPMM3 (0x0B|0x20)#define EPMM4 (0x0C|0x20)#define EPMM5 (0x0D|0x20)#define EPMM6 (0x0E|0x20)#define EPMM7 (0x0F|0x20)#define EPMCSL (0x10|0x20)#define EPMCSH (0x11|0x20)#define EPMOL (0x14|0x20)#define EPMOH (0x15|0x20)#define EWOLIE (0x16|0x20)#define EWOLIR (0x17|0x20)#define ERXFCON (0x18|0x20)#define EPKTCNT (0x19|0x20)// Bank 2 registers#define MACON1 (0x00|0x40|0x80)#define MACON2 (0x01|0x40|0x80)#define MACON3 (0x02|0x40|0x80)#define MACON4 (0x03|0x40|0x80)#define MABBIPG (0x04|0x40|0x80)#define MAIPGL (0x06|0x40|0x80)#define MAIPGH (0x07|0x40|0x80)#define MACLCON1 (0x08|0x40|0x80)#define MACLCON2 (0x09|0x40|0x80)#define MAMXFLL (0x0A|0x40|0x80)#define MAMXFLH (0x0B|0x40|0x80)#define MAPHSUP (0x0D|0x40|0x80)#define MICON (0x11|0x40|0x80)#define MICMD (0x12|0x40|0x80)#define MIREGADR (0x14|0x40|0x80)#define MIWRL (0x16|0x40|0x80)#define MIWRH (0x17|0x40|0x80)#define MIRDL (0x18|0x40|0x80)#define MIRDH (0x19|0x40|0x80)// Bank 3 registers#define MAADR1 (0x00|0x60|0x80)#define MAADR0 (0x01|0x60|0x80)#define MAADR3 (0x02|0x60|0x80)#define MAADR2 (0x03|0x60|0x80)#define MAADR5 (0x04|0x60|0x80)#define MAADR4 (0x05|0x60|0x80)#define EBSTSD (0x06|0x60)#define EBSTCON (0x07|0x60)#define EBSTCSL (0x08|0x60)#define EBSTCSH (0x09|0x60)#define MISTAT (0x0A|0x60|0x80)#define EREVID (0x12|0x60)#define ECOCON (0x15|0x60)#define EFLOCON (0x17|0x60)#define EPAUSL (0x18|0x60)#define EPAUSH (0x19|0x60)// PHY registers#define PHCON1 0x00#define PHSTAT1 0x01#define PHHID1 0x02#define PHHID2 0x03#define PHCON2 0x10#define PHSTAT2 0x11#define PHIE 0x12#define PHIR 0x13#define PHLCON 0x14 // ENC28J60 ERXFCON Register Bit Definitions#define ERXFCON_UCEN 0x80#define ERXFCON_ANDOR 0x40#define ERXFCON_CRCEN 0x20#define ERXFCON_PMEN 0x10#define ERXFCON_MPEN 0x08#define ERXFCON_HTEN 0x04#define ERXFCON_MCEN 0x02#define ERXFCON_BCEN 0x01// ENC28J60 EIE Register Bit Definitions#define EIE_INTIE 0x80#define EIE_PKTIE 0x40#define EIE_DMAIE 0x20#define EIE_LINKIE 0x10#define EIE_TXIE 0x08#define EIE_WOLIE 0x04#define EIE_TXERIE 0x02#define EIE_RXERIE 0x01// ENC28J60 EIR Register Bit Definitions#define EIR_PKTIF 0x40#define EIR_DMAIF 0x20#define EIR_LINKIF 0x10#define EIR_TXIF 0x08#define EIR_WOLIF 0x04#define EIR_TXERIF 0x02#define EIR_RXERIF 0x01// ENC28J60 ESTAT Register Bit Definitions#define ESTAT_INT 0x80#define ESTAT_LATECOL 0x10#define ESTAT_RXBUSY 0x04#define ESTAT_TXABRT 0x02#define ESTAT_CLKRDY 0x01// ENC28J60 ECON2 Register Bit Definitions#define ECON2_AUTOINC 0x80#define ECON2_PKTDEC 0x40#define ECON2_PWRSV 0x20#define ECON2_VRPS 0x08// ENC28J60 ECON1 Register Bit Definitions#define ECON1_TXRST 0x80#define ECON1_RXRST 0x40#define ECON1_DMAST 0x20#define ECON1_CSUMEN 0x10#define ECON1_TXRTS 0x08#define ECON1_RXEN 0x04#define ECON1_BSEL1 0x02#define ECON1_BSEL0 0x01// ENC28J60 MACON1 Register Bit Definitions#define MACON1_LOOPBK 0x10#define MACON1_TXPAUS 0x08#define MACON1_RXPAUS 0x04#define MACON1_PASSALL 0x02#define MACON1_MARXEN 0x01// ENC28J60 MACON2 Register Bit Definitions#define MACON2_MARST 0x80#define MACON2_RNDRST 0x40#define MACON2_MARXRST 0x08#define MACON2_RFUNRST 0x04#define MACON2_MATXRST 0x02#define MACON2_TFUNRST 0x01// ENC28J60 MACON3 Register Bit Definitions#define MACON3_PADCFG2 0x80#define MACON3_PADCFG1 0x40#define MACON3_PADCFG0 0x20#define MACON3_TXCRCEN 0x10#define MACON3_PHDRLEN 0x08#define MACON3_HFRMLEN 0x04#define MACON3_FRMLNEN 0x02#define MACON3_FULDPX 0x01// ENC28J60 MICMD Register Bit Definitions#define MICMD_MIISCAN 0x02#define MICMD_MIIRD 0x01// ENC28J60 MISTAT Register Bit Definitions#define MISTAT_NVALID 0x04#define MISTAT_SCAN 0x02#define MISTAT_BUSY 0x01// ENC28J60 PHY PHCON1 Register Bit Definitions#define PHCON1_PRST 0x8000#define PHCON1_PLOOPBK 0x4000#define PHCON1_PPWRSV 0x0800#define PHCON1_PDPXMD 0x0100// ENC28J60 PHY PHSTAT1 Register Bit Definitions#define PHSTAT1_PFDPX 0x1000#define PHSTAT1_PHDPX 0x0800#define PHSTAT1_LLSTAT 0x0004#define PHSTAT1_JBSTAT 0x0002// ENC28J60 PHY PHCON2 Register Bit Definitions#define PHCON2_FRCLINK 0x4000#define PHCON2_TXDIS 0x2000#define PHCON2_JABBER 0x0400#define PHCON2_HDLDIS 0x0100// ENC28J60 Packet Control Byte Bit Definitions#define PKTCTRL_PHUGEEN 0x08#define PKTCTRL_PPADEN 0x04#define PKTCTRL_PCRCEN 0x02#define PKTCTRL_POVERRIDE 0x01// SPI operation codes#define ENC28J60_READ_CTRL_REG 0x00#define ENC28J60_READ_BUF_MEM 0x3A#define ENC28J60_WRITE_CTRL_REG 0x40#define ENC28J60_WRITE_BUF_MEM 0x7A#define ENC28J60_BIT_FIELD_SET 0x80#define ENC28J60_BIT_FIELD_CLR 0xA0#define ENC28J60_SOFT_RESET 0xFF// The RXSTART_INIT should be zero. See Rev. B4 Silicon Errata// buffer boundaries applied to internal 8K ram// the entire available packet buffer space is allocated//// start with recbuf at 0/#define RXSTART_INIT 0x0// receive buffer end#define RXSTOP_INIT (0x1FFF-1518-1)// start TX buffer at 0x1FFF-0x0600, pace for one full ethernet frame (0~1518 bytes)#define TXSTART_INIT (0x1FFF-1518)// stp TX buffer at end of mem#define TXSTOP_INIT 0x1FFF// max frame length which the conroller will accept:#define MAX_FRAMELEN 1518 // (note: maximum ethernet frame length would be 1518)////////////////////////////////////////////////////////////////////////////////////////////////////////////////void ENC28J60_Reset(void);u8 ENC28J60_Read_Op(u8 op,u8 addr);void ENC28J60_Write_Op(u8 op,u8 addr,u8 data);void ENC28J60_Read_Buf(u32 len,u8* data);void ENC28J60_Write_Buf(u32 len,u8* data);void ENC28J60_Set_Bank(u8 bank);u8 ENC28J60_Read(u8 addr);void ENC28J60_Write(u8 addr,u8 data);void ENC28J60_PHY_Write(u8 addr,u32 data);u8 ENC28J60_Init(u8* macaddr);u8 ENC28J60_Get_EREVID(void);void ENC28J60_Packet_Send(u32 len,u8* packet);u32 ENC28J60_Packet_Receive(u32 maxlen,u8* packet); #endif边栏推荐
- 用友OA漏洞学习——NCFindWeb 目录遍历漏洞
- DOM Brief
- 2022暑期项目实训(一)
- 2022 Summer Project Training (II)
- 简单易用的PDF转SVG程序
- [sword finger offer] 60 Points of N dice
- win10系统下插入U盘有声音提示却不显示盘符
- UFIDA OA vulnerability learning - ncfindweb directory traversal vulnerability
- 随着MapReduce job实现去加重,多种输出文件夹
- Declval (example of return value of guidance function)
猜你喜欢
【.NET CORE】 请求长度过长报错解决方案
![[the 300th weekly match of leetcode]](/img/a7/16b491656863e2c423ff657ac6e9c5.png)
[the 300th weekly match of leetcode]
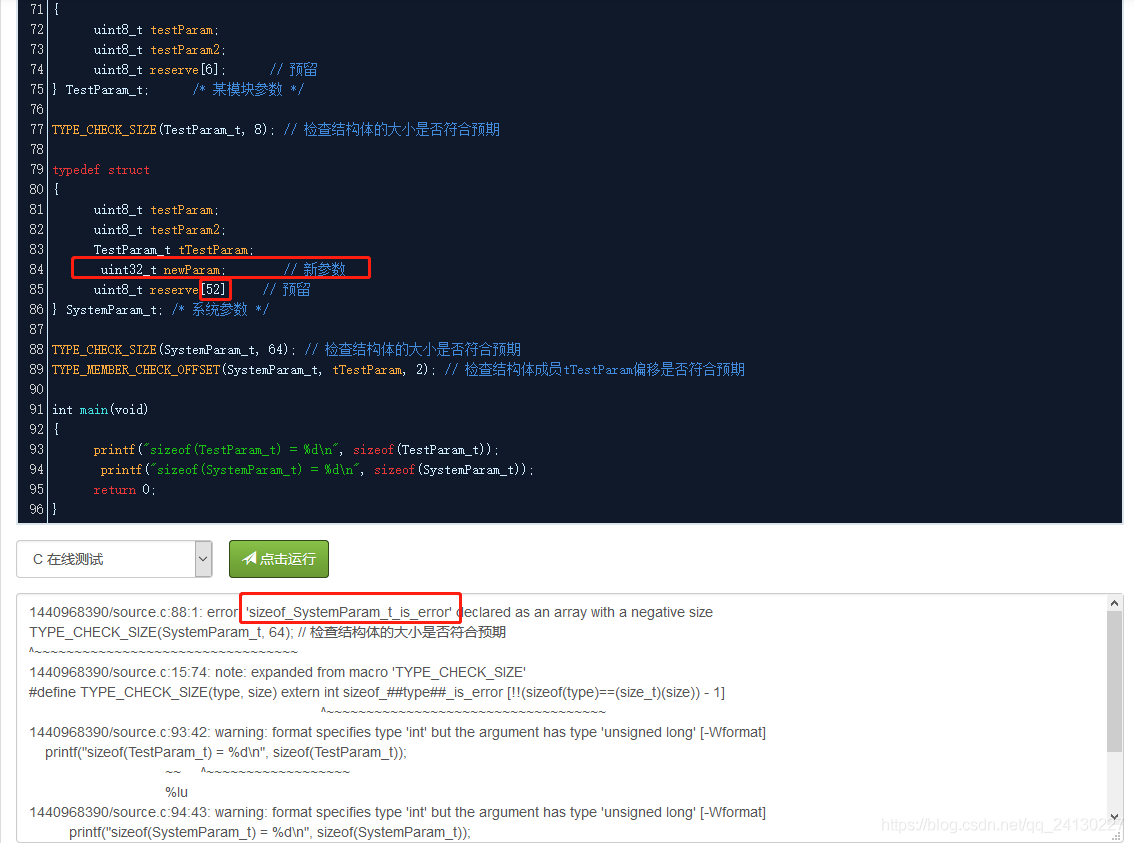
当保存参数使用结构体时必备的开发技巧方式
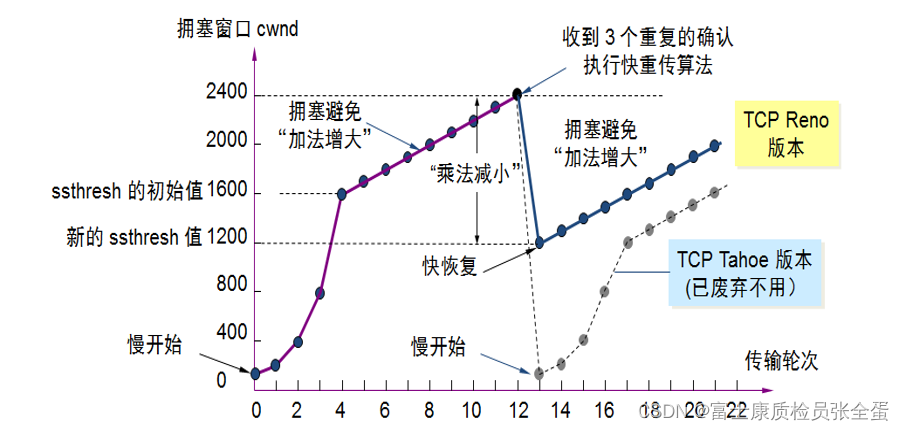
传输层 拥塞控制-慢开始和拥塞避免 快重传 快恢复
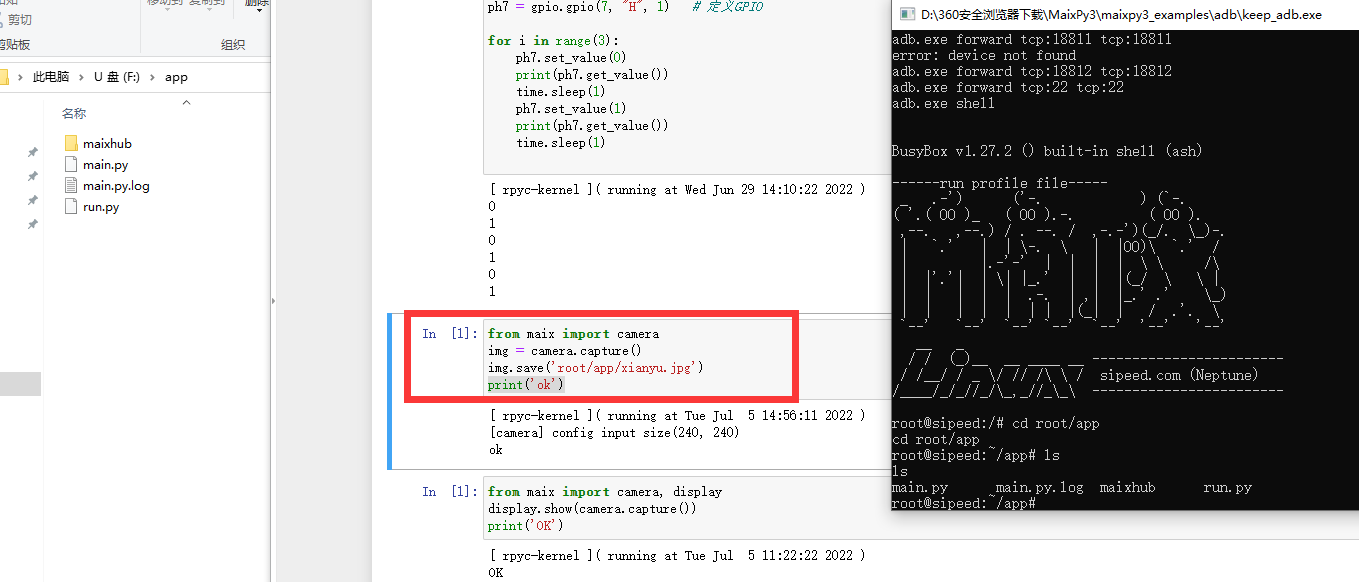
Maixll-Dock 摄像头使用
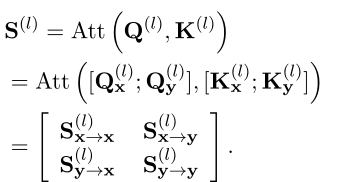
Distiller les connaissances du modèle interactif! L'Université de technologie de Chine & meituan propose Virt, qui a à la fois l'efficacité du modèle à deux tours et la performance du modèle interacti
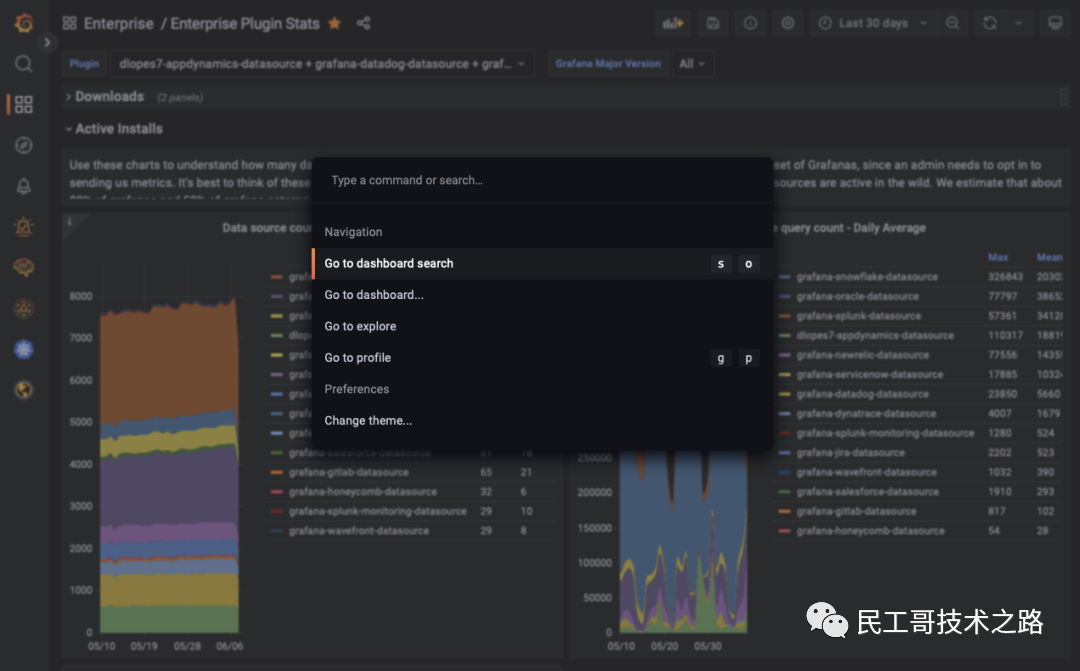
Grafana 9.0 正式发布!堪称最强!
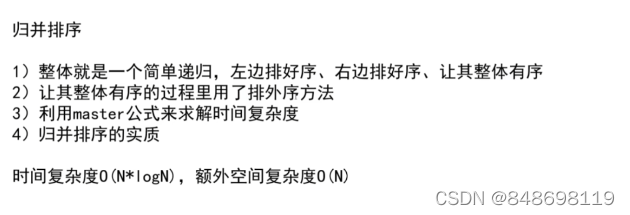
递归的方式
Coco2017 dataset usage (brief introduction)
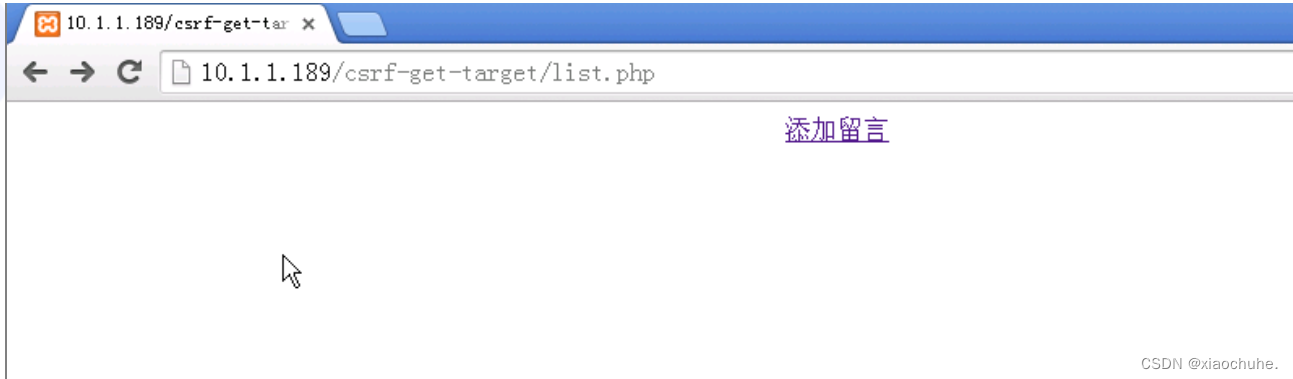
CSRF漏洞分析
随机推荐
Common - magic number 7
Grafana 9.0 正式发布!堪称最强!
Coco2017 dataset usage (brief introduction)
Picture zoom Center
Xu Xiang's wife Ying Ying responded to the "stock review": she wrote it!
epoll()无论涉及wait队列分析
从交互模型中蒸馏知识!中科大&美团提出VIRT,兼具双塔模型的效率和交互模型的性能,在文本匹配上实现性能和效率的平衡!...
【LeetCode第 300 场周赛】
Atcoder a mountaineer
虚拟机VirtualBox和Vagrant安装
Specify flume introduction, installation and configuration
atcoder它A Mountaineer
2022暑期项目实训(三)
C language exchanges two numbers through pointers
Tree-LSTM的一些理解以及DGL代码实现
MySQL查询请求的执行过程——底层原理
Implementation of queue
10、 Process management
Declval of template in generic programming
Automatic reservation of air tickets in C language