当前位置:网站首页>open3d学习笔记四【表面重建】
open3d学习笔记四【表面重建】
2022-07-02 06:26:00 【寂云萧】
open3d表面重建
Alpha shapes
利用凸包搞得重建。
import open3d as o3d
mesh_ply = o3d.io.read_triangle_mesh("mode/bunny.ply")
# 采样
pcd = mesh_ply.sample_points_poisson_disk(750)
# 看一下凸包情况
hull, _ = pcd.compute_convex_hull()
hull_ls = o3d.geometry.LineSet.create_from_triangle_mesh(hull)
hull_ls.paint_uniform_color((1, 0, 0))
o3d.visualization.draw_geometries([pcd, hull_ls], width=1280, height=720)
#开始表面重建,alpha值可调
alpha = 0.1
print(f"alpha={alpha:.3f}")
mesh = o3d.geometry.TriangleMesh.create_from_point_cloud_alpha_shape(pcd, alpha)
mesh.compute_vertex_normals()
print(mesh)
o3d.visualization.draw_geometries([mesh], mesh_show_back_face=True, width=1280, height=720)
结果:
凸包情况
重建效果,Alpha=0.1
继续,Alpha = 0.015



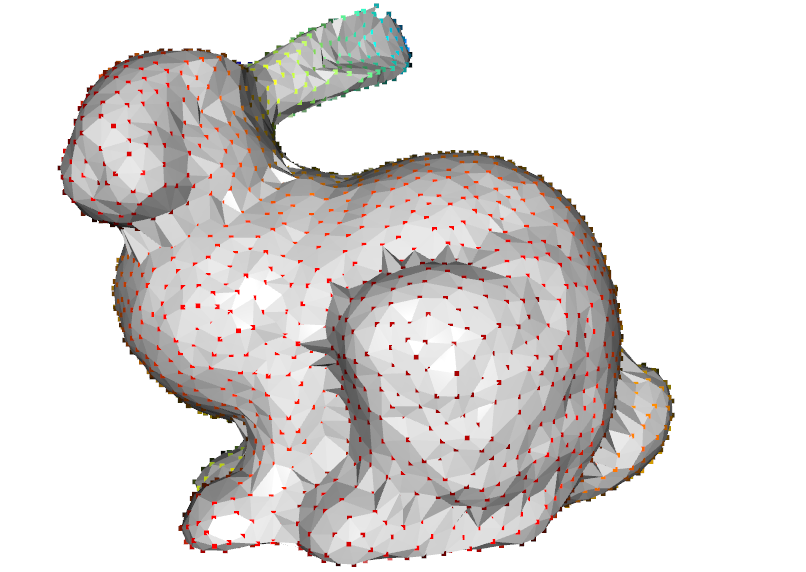
滚球法
import open3d as o3d
mesh = o3d.io.read_triangle_mesh("mode/bunny.ply")
mesh.compute_vertex_normals()
#老规矩,先采样
pcd = mesh.sample_points_poisson_disk(3000)
#这里可以看到法线
o3d.visualization.draw_geometries([pcd], point_show_normal=True, width=1280, height=720)
#开始重建
radii = [0.005, 0.01, 0.02, 0.04]
rec_mesh = o3d.geometry.TriangleMesh.create_from_point_cloud_ball_pivoting(pcd, o3d.utility.DoubleVector(radii))
o3d.visualization.draw_geometries([pcd, rec_mesh], width=1280, height=720)
效果:
法线标注情况
重建效果

泊松表面重建
上面两种,滚球法看上去还不错,但实际上两个都很鸡肋,不够平滑。这方面泊松重建会好一点。
泊松表面重建可调节参数只有一个,那就是depth,这是定义八叉树深度的,数值高的话细节会更多一点。
import open3d as o3d
mesh = o3d.io.read_triangle_mesh("mode/Fantasy Dragon.ply")
mesh.compute_vertex_normals()
pcd = mesh.sample_points_poisson_disk(3000)
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:
mesh, densities = o3d.geometry.TriangleMesh.create_from_point_cloud_poisson(pcd, depth=9)
#给他涂个颜色
mesh.paint_uniform_color([1, 0, 0])
o3d.visualization.draw_geometries([mesh], zoom=0.664,
front=[-0.4761, -0.4698, -0.7434],
lookat=[1.8900, 3.2596, 0.9284],
up=[0.2304, -0.8825, 0.4101],
width=1280,
height=720)

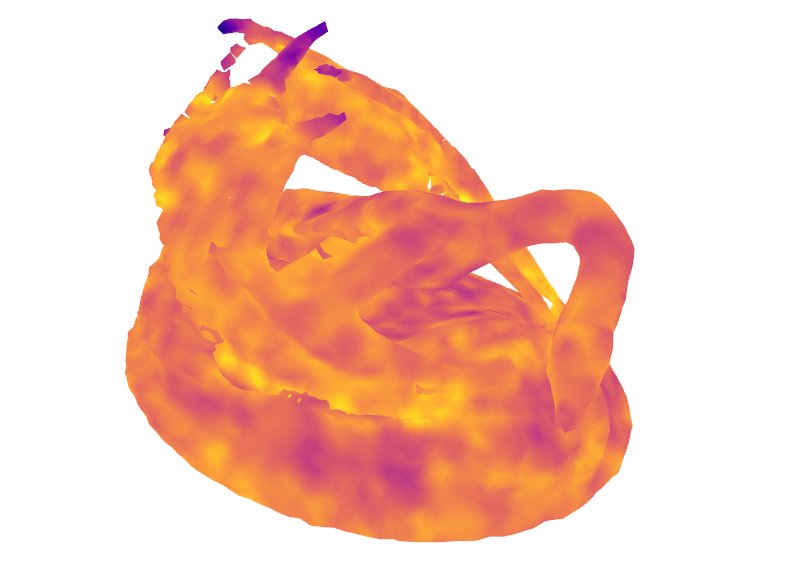
接下来走个流程,看看点的密度。
print('visualize densities')
densities = np.asarray(densities)
density_colors = plt.get_cmap('plasma')(
(densities - densities.min()) / (densities.max() - densities.min()))
density_colors = density_colors[:, :3]
density_mesh = o3d.geometry.TriangleMesh()
density_mesh.vertices = mesh.vertices
density_mesh.triangles = mesh.triangles
density_mesh.triangle_normals = mesh.triangle_normals
density_mesh.vertex_colors = o3d.utility.Vector3dVector(density_colors)
o3d.visualization.draw_geometries([density_mesh], zoom=0.664,
front=[-0.4761, -0.4698, -0.7434],
lookat=[1.8900, 3.2596, 0.9284],
up=[0.2304, -0.8825, 0.4101],
width=1280,
height=720)

紫色是低密度,黄色是高密度,可以筛出一些点密度低的。结果如下:
看似没什么变化。采样点3000的情况下重建,依旧存在一些散点噪点。要去除噪点,有两种办法:第一种:继续减少采样点;第二种,增加采样点。减少采样点会丢失更多细节,所以不推荐。
咱们来看看增加采样点的效果。
采样点=10000
几乎是还原了原貌,但是如果去除了低密度区域呢?
变得不完整了。所以看情况使用删点功能。

下面看看减少采样点的情况。
采样点=1000

跟预想中一样,虽然原来的那些散点没了,但同时也丢失了很多细节,得不偿失。
接下来换个模型看看重建效果。
采样点15000
接近极限了,即使是采样点基本包裹了整个模型,也依旧会丢失一些细节。

边栏推荐
- PHP returns the corresponding key value according to the value in the two-dimensional array
- 【Sparse-to-Dense】《Sparse-to-Dense:Depth Prediction from Sparse Depth Samples and a Single Image》
- [in depth learning series (8)]: principles of transform and actual combat
- Interpretation of ernie1.0 and ernie2.0 papers
- Installation and use of image data crawling tool Image Downloader
- Delete the contents under the specified folder in PHP
- Get the uppercase initials of Chinese Pinyin in PHP
- 解决latex图片浮动的问题
- Sorting out dialectics of nature
- Convert timestamp into milliseconds and format time in PHP
猜你喜欢

Deep learning classification Optimization Practice
【Mixup】《Mixup:Beyond Empirical Risk Minimization》

Interpretation of ernie1.0 and ernie2.0 papers

【TCDCN】《Facial landmark detection by deep multi-task learning》

自然辩证辨析题整理
半监督之mixmatch

Faster-ILOD、maskrcnn_benchmark训练自己的voc数据集及问题汇总
Thesis writing tip2
【MEDICAL】Attend to Medical Ontologies: Content Selection for Clinical Abstractive Summarization
【深度学习系列(八)】:Transoform原理及实战之原理篇
随机推荐
【AutoAugment】《AutoAugment:Learning Augmentation Policies from Data》
Memory model of program
【Cascade FPD】《Deep Convolutional Network Cascade for Facial Point Detection》
Traditional target detection notes 1__ Viola Jones
Calculate the difference in days, months, and years between two dates in PHP
SSM supermarket order management system
【MEDICAL】Attend to Medical Ontologies: Content Selection for Clinical Abstractive Summarization
Mmdetection installation problem
Regular expressions in MySQL
mmdetection训练自己的数据集--CVAT标注文件导出coco格式及相关操作
Timeout docking video generation
[Sparse to Dense] Sparse to Dense: Depth Prediction from Sparse Depth samples and a Single Image
生成模型与判别模型的区别与理解
【Paper Reading】
Point cloud data understanding (step 3 of pointnet Implementation)
一份Slide两张表格带你快速了解目标检测
How to clean up logs on notebook computers to improve the response speed of web pages
One field in thinkphp5 corresponds to multiple fuzzy queries
Generate random 6-bit invitation code in PHP
聊天中文语料库对比(附上各资源链接)