当前位置:网站首页>The problem of configuring opencv in qt5.13.2 is solved in detail
The problem of configuring opencv in qt5.13.2 is solved in detail
2022-07-05 07:11:00 【Weft collar network】
1、 Check WITH_QT and WITH_OPENGL, Can't check WITH_IPP
A wrong [modules\core\CMakeFiles\opencv_core.dir\build.make:1494: modules/core/CMakeFiles/opencv_core.dir/vs_version.rc.obj] Error 1
take CMake Medium OPENCV/OPENCV_ENABLE_ALLOCATOR_STATS Don't tick
Error 2 [modules\core\CMakeFiles\opencv_core.dir\build.make:1708: bin/libopencv_core450.dll] Error 1
Set up OPENCV_VS_VERSIONINFO_SKIP=1, That is, tick , If the variable cannot be found OPENCV_VS_VERSIONINFO_SKIP, You can add one by yourself :
Error of three
CMake Error: CMake was unable to find a build program corresponding to "MinGW Makefiles". CMAKE_MAK
take CMAKE_MAKE_PROGRAM The path after the item is set to Qt The path under the installation path is as follows :MinGW/bin/mingw32-make.exe, Click... Again Configure
Error four
windres.exe: unknown option -- W
take “ENABLE_PRECOMPILED_HEADERS” Cancel
Error five
in the file opencv/sources/modules/videoio/src/cap_dshow.cpp, you have the following error : 'sprintf_instead_use_StringCbPrintfA_or_StringCchPrintfA' was not declared in this scope ...
solve :opencv\source\modules\videoio\src\cap_dshow.cpp in , stay #include “DShow.h“ Insert in previous line : #define NO_DSHOW_STRSAFE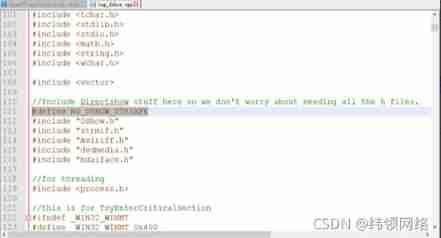
Error 6

CMake Closed in WITH_OPENCL_D3D11_NV Options , To regenerate the
边栏推荐
猜你喜欢
【软件测试】06 -- 软件测试的基本流程
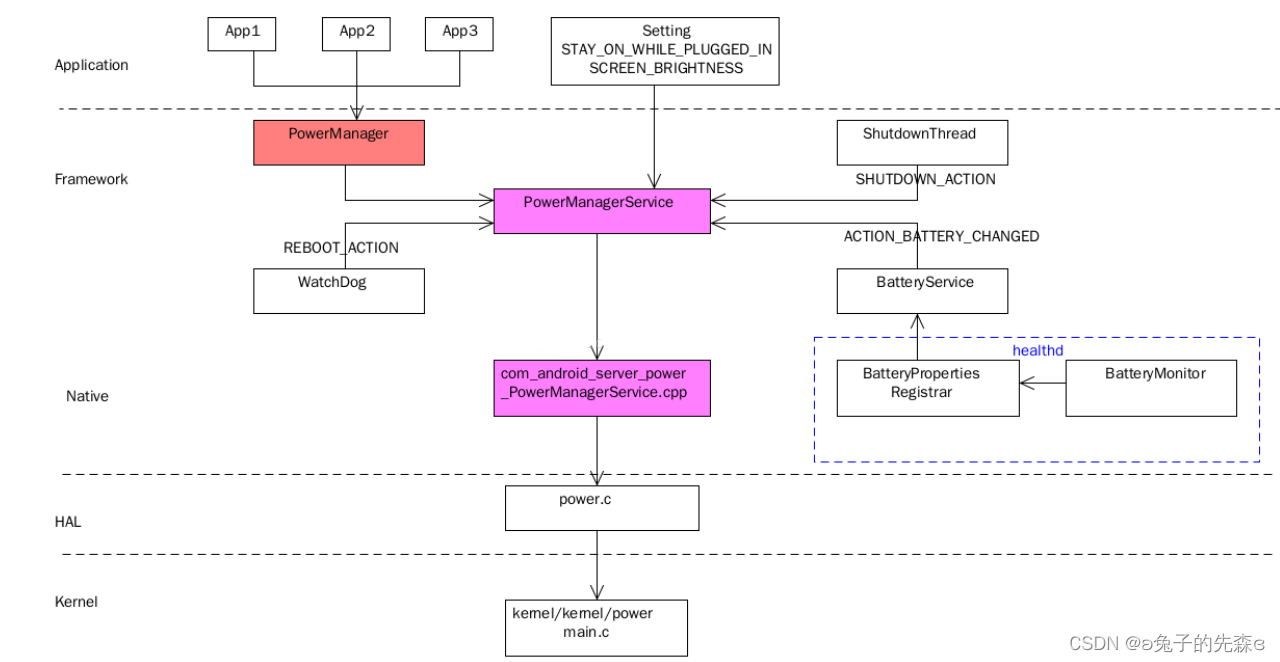
PowerManagerService(一)— 初始化
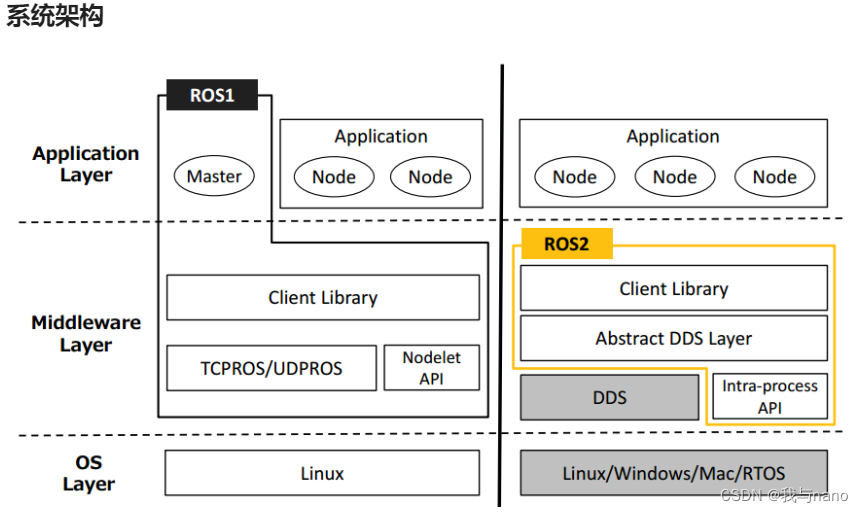
ROS2——ROS2对比ROS1(二)
1290_FreeRTOS中prvTaskIsTaskSuspended()接口实现分析
![[untitled]](/img/d5/2ac2b15818cf66c241e307c6723d50.jpg)
[untitled]
[software testing] 06 -- basic process of software testing
ROS2——配置开发环境(五)
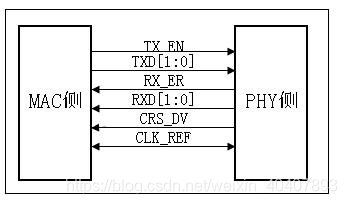
Literacy Ethernet MII interface types Daquan MII, RMII, smii, gmii, rgmii, sgmii, XGMII, XAUI, rxaui
你心目中的数据分析 Top 1 选 Pandas 还是选 SQL?
inux摄像头(mipi接口)简要说明
随机推荐
三体目标管理笔记
Preemption of CFS scheduling
Use of Pai platform
Docker installs MySQL and uses Navicat to connect
基于Cortex-M3、M4的GPIO口位带操作宏定义(可总线输入输出,可用于STM32、ADuCM4050等)
mysql设置触发器问题
SD_CMD_RECEIVE_SHIFT_REGISTER
【软件测试】05 -- 软件测试的原则
testing framework
IPage能正常显示数据,但是total一直等于0
SRE核心体系了解
Orin installs CUDA environment
Now there are HTML files and MVC made with vs (connected to the database). How can they be connected?
Concurrent programming - deadlock troubleshooting and handling
Page type
逻辑结构与物理结构
Intelligent target detection 59 -- detailed explanation of pytoch focal loss and its implementation in yolov4
Error: "mountvolume.setup failed for volume PVC fault handling
Mid 2022 documentary -- the experience of an ordinary person
In C language, int a= 'R'