当前位置:网站首页>ROS 问题(topic types do not match、topic datatype/md5sum not match、msg xxx have changed. rerun cmake)
ROS 问题(topic types do not match、topic datatype/md5sum not match、msg xxx have changed. rerun cmake)
2022-07-07 23:26:00 【wohu1104】
1. topic types 不匹配
使用 roslaunch 命令
roslaunch carla_ros_bridge carla_ros_bridge_with_example_ego_vehicle.launch
启动官方 demo 后,试图通过手写 Python 脚本来控制车辆,但是有下面报错:
Could not process inbound connection: topic types do not match:
[carla_msgs/CarlaEgoVehicleControl] vs. [topic_demo/CarlaEgoVehicleControl]
很明显 topic 类型不匹配,我们需要给 carla_msgs/CarlaEgoVehicleControl 发送控制命令,那么我们的 topic 也应该是 carla_msgs 。
解决方法:
- 在
~/catkin_ws目录下重新创建carla_msgs文件夹后再重新执行catkin_make命令
2. topic datatype/md5sum 不一致
问题 1 解决后又有如下报错
Could not process inbound connection: Client [/carla_ros_bridge]
wants topic [/carla/ego_vehicle/vehicle_control_cmd] to have datatype/md5sum
[carla_msgs/CarlaEgoVehicleControl/e5b57fc698c12ff4c20a5fc71fba832f],
but our version has [carla_msgs/CarlaEgoVehicleControl/919d1c0732720a839958ff82b9ba0dcd]
Dropping connection.
是因为我们修改了该 topic 对应的 msg 或者 srv 文件,导致两者的 MD5 值不一致。
解决方法:
- 将原始的
msg或者srv文件拷贝过来放到自己当前Python项目的package目录下,然后重新执行catkin_make。
3. message/service xxx have changed. Please rerun cmake.
问题 1 和 2 解决后接着执行 catkin_make 命令时又报错:
The dependencies of the message/service 'carla_msgs/CarlaEgoVehicleControl' have changed. Please rerun cmake.
carla_msgs/CMakeFiles/_carla_msgs_generate_messages_check_deps_CarlaEgoVehicleControl.dir/build.make:57:
recipe for target 'carla_msgs/CMakeFiles/_carla_msgs_generate_messages_check_deps_CarlaEgoVehicleControl' failed
很明显由于 CarlaEgoVehicleControl.msg 文件改动后导致需要重新 cmake。
解决方法:
- 删除工作空间
~/catkin_ws中devel和build目录下对应的项目目录文件,比如我的目录carla_msgs。(build目录下包含include和lib目录)
参考:https://answers.ros.org/question/138731/catkin_make-clean/
边栏推荐
- Swift get URL parameters
- 2022 operation certificate examination for main principals of hazardous chemical business units and main principals of hazardous chemical business units
- Mathematical modeling -- knowledge map
- The difference between distribution function and probability density function of random variables
- 6. Dropout application
- 2022 low voltage electrician examination content and low voltage electrician simulation examination question bank
- 2022 R1 fast opening pressure vessel operation test question bank and R1 fast opening pressure vessel operation free test questions
- Chapter 5 neural network
- Gnuradio transmits video and displays it in real time using VLC
- 2022 free test questions of fusion welding and thermal cutting and summary of fusion welding and thermal cutting examination
猜你喜欢
Measure the voltage with analog input (taking Arduino as an example, the range is about 1KV)
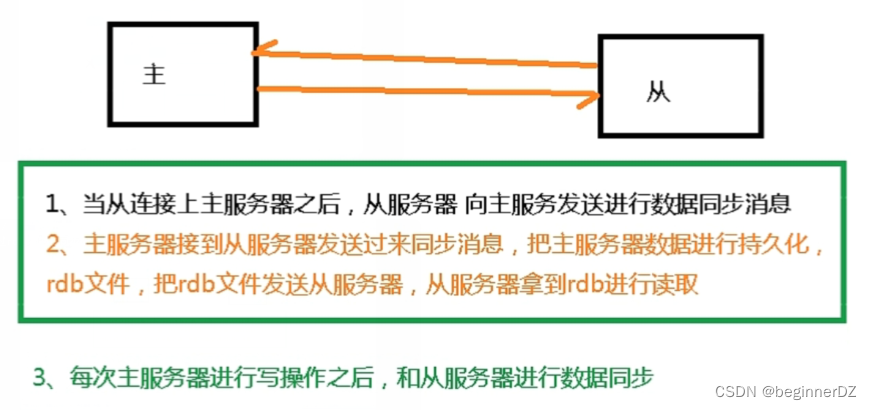
Redis 主从复制
![[loss function] entropy / relative entropy / cross entropy](/img/bc/574a4745336b0baf1a4ca53af41a82.jpg)
[loss function] entropy / relative entropy / cross entropy
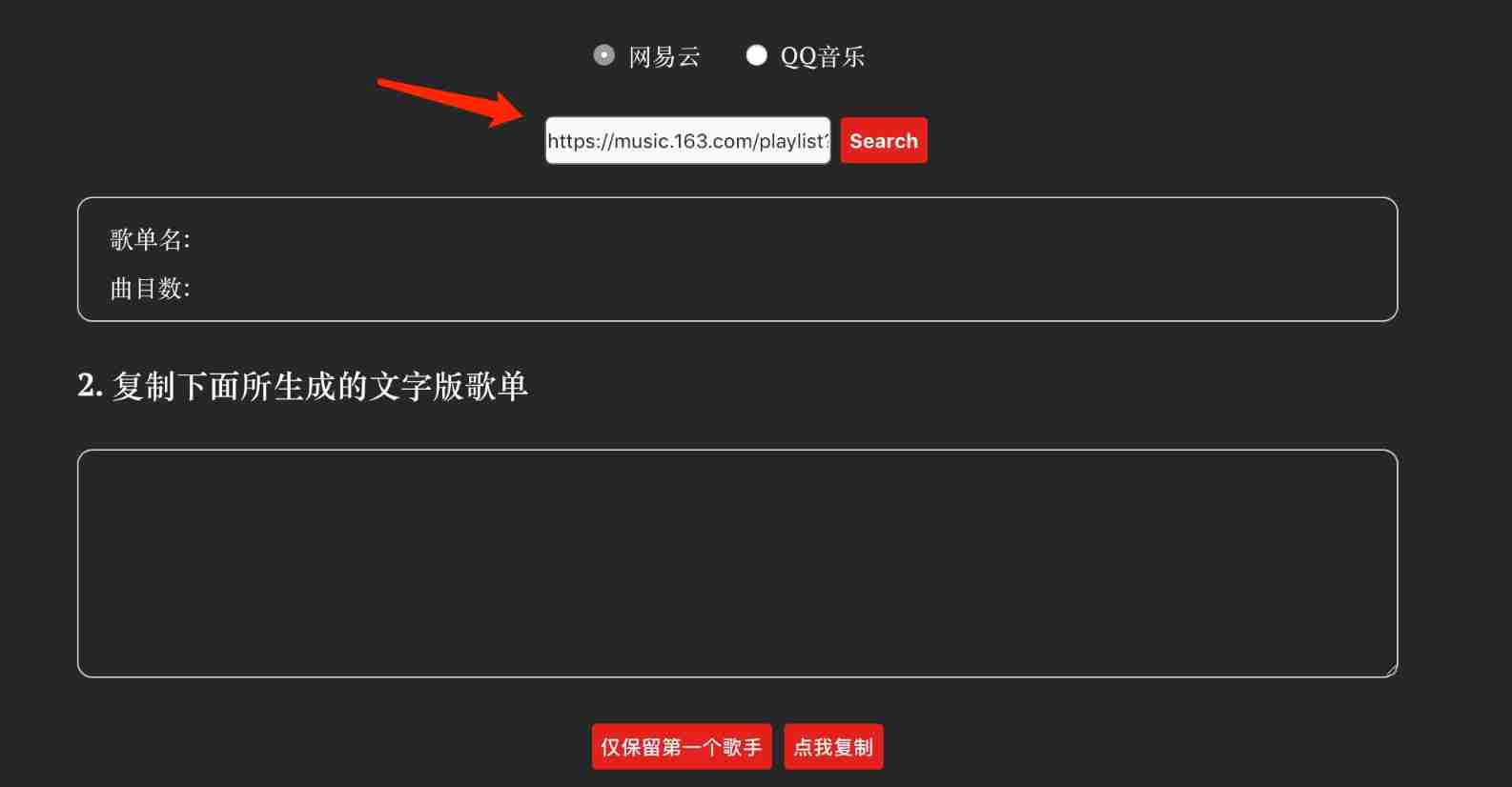
How to transfer Netease cloud music /qq music to Apple Music

Macro definition and multiple parameters
Ag9310 design USB type C to hdmi+u2+5v slow charging scheme design | ag9310 expansion dock scheme circuit | type-C dongle design data
2021-03-06 - play with the application of reflection in the framework
Y59. Chapter III kubernetes from entry to proficiency - continuous integration and deployment (III, II)
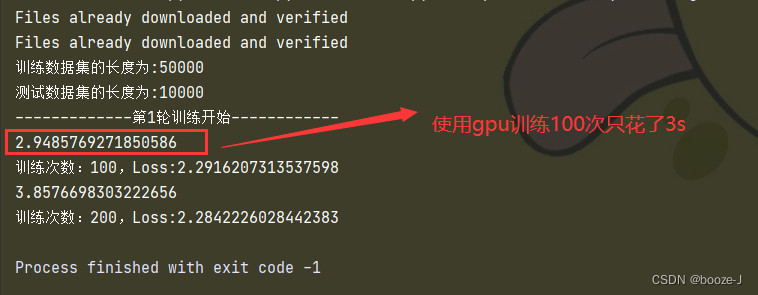
Using GPU to train network model
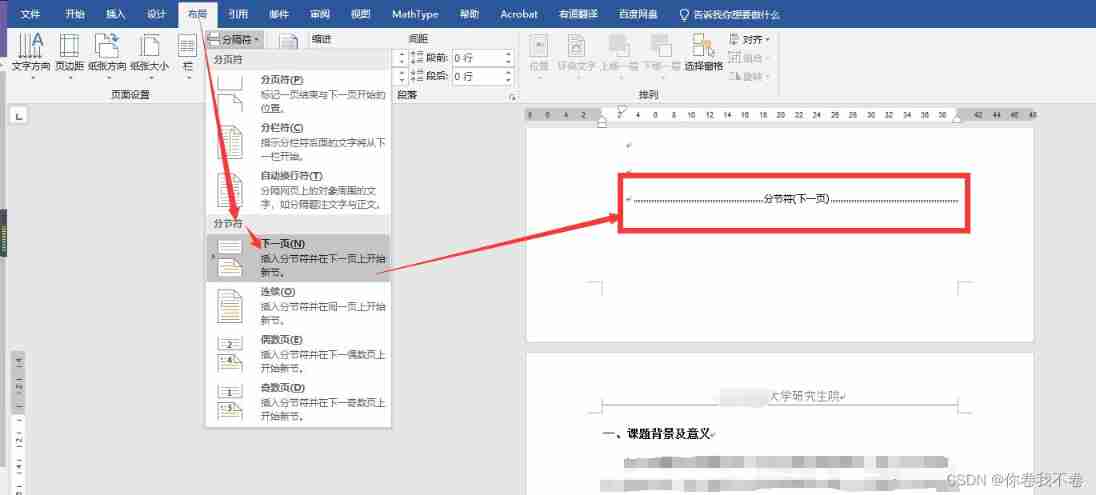
Different methods for setting headers of different pages in word (the same for footer and page number)
随机推荐
Different methods for setting headers of different pages in word (the same for footer and page number)
USB type-C docking design | design USB type-C docking scheme | USB type-C docking circuit reference
Smart agricultural technology framework
Ag9310meq ag9310mfq angle two USB type C to HDMI audio and video data conversion function chips parameter difference and design circuit reference
Guojingxin center "friendship and righteousness" - the meta universe based on friendship and friendship, and the parallel of "honguniverse"
Common fault analysis and Countermeasures of using MySQL in go language
6. Dropout application
How to get the first and last days of a given month
Led serial communication
4. Cross entropy
2021-03-06 - play with the application of reflection in the framework
2、TD+Learning
npm 内部拆分模块
Gnuradio3.9.4 create OOT module instances
4、策略学习
Guojingxin center "APEC education +" Shanghai Jiaotong University Japan Cooperation Center x Fudan philosophy class "Zhe Yi" 2022 New Year greetings
Understanding of sidelobe cancellation
Using GPU to train network model
Saving and reading of network model
Running OFDM in gnuradio_ RX error: gr:: Log: info: packet_ headerparser_ b0 - Detected an invalid packet at item ××