当前位置:网站首页>GPS from getting started to giving up (XI), differential GPS
GPS from getting started to giving up (XI), differential GPS
2022-07-06 22:03:00 【Chasing wind】
One 、 principle
Difference GPS By eliminating or reducing GPS The measurement error is thus improved GPS Method of positioning accuracy .
Difference GPS The basic principle of eliminating or reducing measurement errors is to use the correlation of errors . Take satellite clock error for example . If we know the actual exact position of a receiver , Subtract from its measured position , The error term can be obtained , This error term includes the satellite clock error . If another receiver also receives the same satellite signal nearby to locate , It can reduce the error term in the calculation , This eliminates the satellite clock error , Because for these two receivers , Their satellite clock error is the same , This is the correlation of errors .
Of course , For both receivers , Not all errors are the same , But within a certain range , There are still some errors that are similar . such as Ionospheric delay , If two receivers are close , It can be approximately regarded as the same ; Empathy , Tropospheric delay 、 This correlation also exists in satellite ephemeris . Other errors are multipath 、 The receiver noise is irrelevant , So such an error cannot pass the difference GPS To eliminate , contrary , They also cause the superposition of errors .
In this difference method , We call the receiver with known location as reference station or base station , Those whose location is unknown are called mobile stations , The error correction value is broadcast by the reference station , The mobile station uses the error correction value to correct the position .
From difference GPS The working principle of is easy to see , The closer the mobile station is to the base station , The correction effect will be better . We call the distance between the mobile station and the reference station Baseline distance , The length of Baseline length .
Two 、 classification
Classification by baseline distance : Local area 、 Area 、 wide area
- Local area is general 10km~100km.
- The wide area can cover the whole continent or the whole world .
- The area is between local area and wide area .
- The target parameters corrected by difference are different , Can be divided into : Position difference 、 Pseudo range difference 、 Carrier phase difference
- Position difference : The base station broadcasts the difference between the position calculated according to its own pseudo range observation value and the known self position , The mobile station calculates the position according to its pseudo range observation value, and then adds the received difference broadcast by the base station to get its final position . This method requires that the position coordinates calculated by the mobile station and the reference station respectively contain the same error term , It also requires that the mobile station and the reference station adopt the same positioning algorithm and the same set of satellite measurements , It's hard to achieve , Poor performance , So I don't use much .
- Pseudo range difference : What the base station broadcasts is the difference between its own pseudo range observation value and the known distance from itself to the satellite , The mobile station uses its own pseudo range observation value plus the received pseudo range difference broadcast by the base station to obtain its own final pseudo range , And then used for position calculation . This method does not require the mobile station and the reference station to adopt the same positioning algorithm , Its accuracy can reach decimeter level .
- Carrier phase difference : Similar to pseudo range difference , Only the base station broadcasts the carrier phase difference correction , There is no need to solve the integer ambiguity in the difference correction term , Just keep its value unchanged ; The mobile station still needs to solve the problem of weekly ambiguity . The accuracy of this method can reach the millimeter level at most .
According to the positioning results, it can be divided into : Absolute positioning 、 Relative positioning
- Absolute positioning requires knowing the precise position of the reference station .
- Relative positioning seeks the position of the mobile station relative to the base station , At this time, the absolute position of the base station may not be known , The base station can directly broadcast the observed values to the mobile station , Instead of broadcasting differential corrections .
Divide by difference : Single difference 、 Double difference 、 Three bad
Single difference : It is the difference between the measured values of two different receivers on the same satellite . It can eliminate the satellite clock error . In the case of a short baseline , It can also basically eliminate the atmospheric delay error . The error of satellite ephemeris is basically eliminated . But the mean square deviation of the measurement noise is expanded to the original root sign 2 times .
Double difference : The difference between the measured values of two satellites by two receivers at the same time , Equivalent to the difference between two single differences , It can eliminate the clock error of the receiver . This is because the receiver clock difference is the same for different satellites . The mean square deviation of double difference noise is single difference Radical sign 2 times .
Three bad : The difference between the measured values of two satellites by two receivers at two times , Equivalent to the difference between two double differences , Double difference cycle ambiguity can be eliminated . This is because when the receiver locks a satellite signal , It keeps the integer ambiguity in the carrier phase measurement of the satellite signal unchanged . Three difference noise mean square deviation is the root of double difference 2 times .
According to the movement state : Static positioning 、 Dynamic positioning
- Static positioning : The measured value can be collected continuously for a long time , And do post-test processing , To improve accuracy .
- Dynamic positioning : It usually meets the requirements of real-time .
According to the real-time requirements : real-time processing 、 Post test processing
3、 ... and 、 Further improvement measures
- The site selection of the reference station is generally open 、 The ground reflection is weak 、 Higher ground , And choose choke antenna and high-quality receiver , To suppress the multipath effect and its own error as much as possible .
- The reference station broadcasts the pseudo range correction value after deducting the influence of its own clock error , To avoid adding error to the user receiver .
- In addition to broadcasting pseudo range correction values, the reference station , The rate of change of the pseudo range correction value is also broadcast , To facilitate the use of the user receiver .
- Large baseline , The local ionosphere is used for the reference station and the mobile station respectively 、 Tropospheric model , It can improve the positioning accuracy .
- If a region is covered by multiple reference stations , The weighted average can be corrected separately , It can reduce the error , Improve accuracy .
- Wide area differential GPS The system is usually responsible for the error of satellite ephemeris 、 Satellite clock error 、 Ionospheric delay, etc. respectively provide differential correction .
边栏推荐
- Digital transformation takes the lead to resume production and work, and online and offline full integration rebuilds business logic
- Reinforcement learning - learning notes 5 | alphago
- HDU 4912 paths on the tree (lca+)
- GPS从入门到放弃(十五)、DCB差分码偏差
- The underlying implementation of string
- PostgreSQL 修改数据库用户的密码
- 1D convolution detail
- Reptile practice (V): climbing watercress top250
- 基于LM317的可调直流电源
- GPS du début à l'abandon (XIII), surveillance autonome de l'intégrité du récepteur (raim)
猜你喜欢
![[Digital IC manual tearing code] Verilog automatic beverage machine | topic | principle | design | simulation](/img/75/c0656c4890795bd65874b4f2b16462.jpg)
[Digital IC manual tearing code] Verilog automatic beverage machine | topic | principle | design | simulation
GNN,请你的网络层数再深一点~
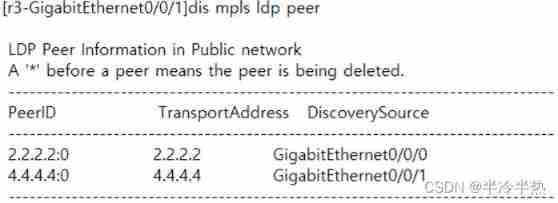
MPLS experiment
![Happy sound 2[sing.2]](/img/ca/1581e561c427cb5b9bd5ae2604b993.jpg)
Happy sound 2[sing.2]
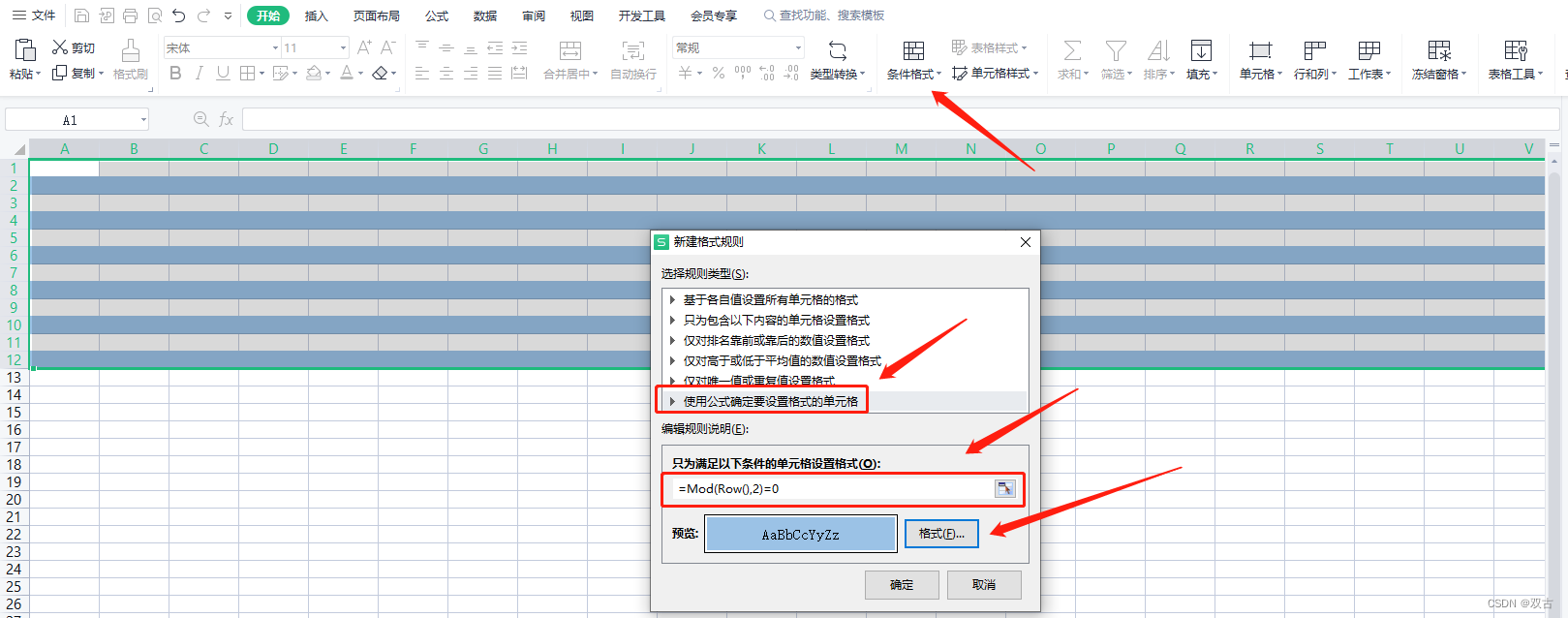
嵌入式常用计算神器EXCEL,欢迎各位推荐技巧,以保持文档持续更新,为其他人提供便利
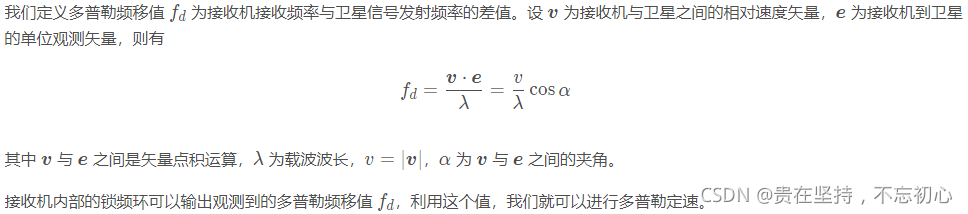
GPS从入门到放弃(十二)、 多普勒定速
JPEG2000 matlab source code implementation

【10点公开课】:视频质量评价基础与实践
C# 如何在dataGridView里设置两个列comboboxcolumn绑定级联事件的一个二级联动效果
Make menuconfig has a recipe for target 'menuconfig' failed error
随机推荐
ViT论文详解
【MySQL】Online DDL详解
Leetcode topic [array] -118 Yang Hui triangle
Checkpoint of RDD in spark
Michael smashed the minority milk sign
mysql根据两个字段去重
Set status bar style demo
GPS from getting started to giving up (XIII), receiver autonomous integrity monitoring (RAIM)
Earned value management EVM detailed explanation and application, example explanation
Run the deep network on PI and Jetson nano, and the program is killed
美国科技行业结束黄金时代,芯片求售、裁员3万等哀声不断
What is the RDD operator in spark
What can one line of code do?
uni-app App端半屏连续扫码
MariaDb数据库管理系统的学习(一)安装示意图
【10点公开课】:视频质量评价基础与实践
npm run dev启动项目报错 document is not defined
High precision face recognition based on insightface, which can directly benchmark hongruan
GPS從入門到放弃(十三)、接收機自主完好性監測(RAIM)
Efficiency tool +wps check box shows the solution to the sun problem