当前位置:网站首页>GPS from entry to abandonment (XVII), tropospheric delay
GPS from entry to abandonment (XVII), tropospheric delay
2022-07-06 21:57:00 【Chasing wind】
One 、 Tropospheric concept
The troposphere (Troposphere) The layer of the earth's atmosphere near the ground . It is also the densest layer in the earth's atmosphere , It contains the entire atmosphere about 75% The quality of the , And almost all water vapor and aerosols .
- The lower boundary of the troposphere is connected with the ground , The upper bound height varies with geographical latitude and season , In low latitudes, the average altitude is 17 ~ 18 km , In mid latitudes, the average is 10 ~ 12 km , In high-dimensional areas, the average is 8 ~ 9 km , And summer is higher than winter .
- The troposphere in the field of satellite navigation is different from the strict definition of troposphere in Atmospheric Science . Tropospheric delay should be considered in the field of satellite navigation , Therefore, the region from the earth's surface to the ionosphere is regarded as the troposphere , From 0km To about 50km Atmospheric region .
- cloud 、 Fog 、 rain 、 Many weather phenomena such as snow occur in the troposphere .
- The main propagation modes or effects in the troposphere are : Atmospheric refraction 、 Waveguide propagation 、 Tropospheric scattering 、 Multipath propagation 、 Atmospheric absorption , And the absorption and scattering of water vapor condensates and other atmospheric particles .
Two 、 The influence of troposphere on satellite navigation
Because satellites are outside the atmosphere , Satellite signals must pass through the troposphere in the atmosphere to spread to the earth , So it must be affected by the troposphere . The troposphere is a non dispersive medium , That is, the dielectric constant of the medium is independent of frequency , So in the troposphere , Electromagnetic waves of different frequencies have the same propagation speed . Therefore, the method of using dual frequency receiver to eliminate ionospheric delay used in the article of ionospheric delay cannot be used in the troposphere . This makes us generally use mathematical models to estimate tropospheric delay in practice . Of course , When there is a base station , The tropospheric delay can also be eliminated by differential method ( Refer to the article Difference GPS).
3、 ... and 、 Tropospheric model
It may be because there are too many tropospheric models , The accuracy is not so high , stay GPS The official reference troposphere model is not given in the interface description document of . Here we have RTKLIB Used in Saastamoinen The model says .
The standard atmosphere model can be expressed as :
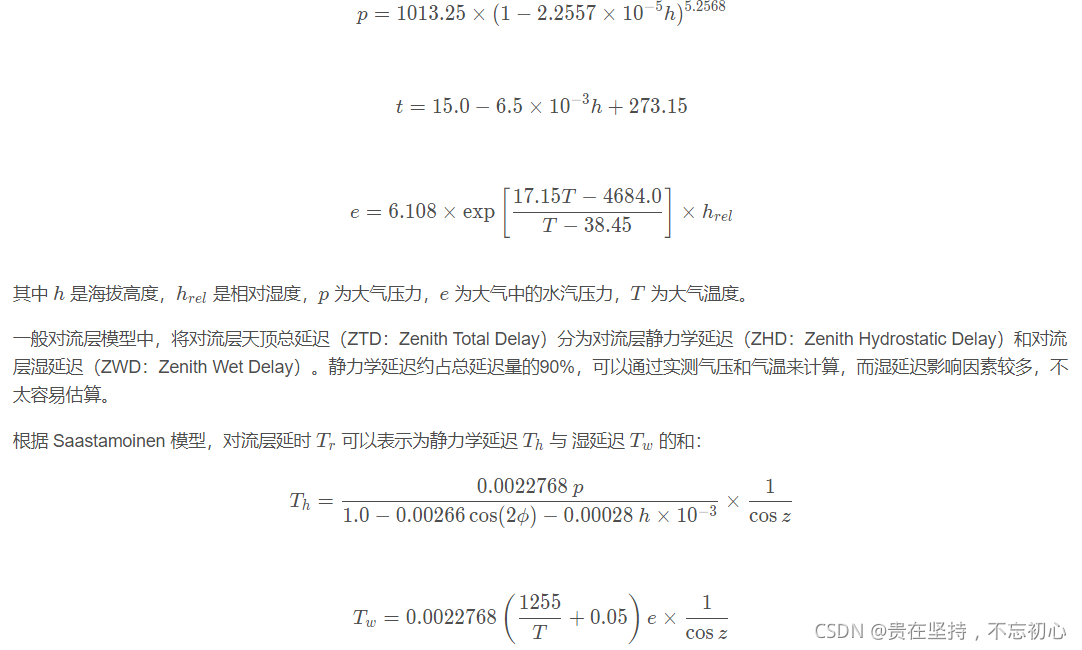

Here's an excerpt from RTKLIB of use Saastamoinen The function code for calculating tropospheric delay by the model , It can correspond to the above formula one by one . Note the unit conversion during calculation ,azel[0], azel[1] They are azimuth and elevation ,pos[0], pos[1] They are the latitude and longitude of the receiver , Their units are radians ,pos[2] Is the receiver height , The unit is rice. .
/* troposphere model -----------------------------------------------------------
* compute tropospheric delay by standard atmosphere and saastamoinen model
* args : gtime_t time I time
* double *pos I receiver position {lat,lon,h} (rad,m)
* double *azel I azimuth/elevation angle {az,el} (rad)
* double humi I relative humidity
* return : tropospheric delay (m)
*-----------------------------------------------------------------------------*/
extern double tropmodel(gtime_t time, const double *pos, const double *azel,
double humi)
{
const double temp0=15.0; /* temparature at sea level */
double hgt,pres,temp,e,z,trph,trpw;
if (pos[2]<-100.0||1E4<pos[2]||azel[1]<=0) return 0.0;
/* standard atmosphere */
hgt=pos[2]<0.0?0.0:pos[2];
pres=1013.25*pow(1.0-2.2557E-5*hgt,5.2568);
temp=temp0-6.5E-3*hgt+273.16;
e=6.108*humi*exp((17.15*temp-4684.0)/(temp-38.45));
/* saastamoninen model */
z=PI/2.0-azel[1];
trph=0.0022768*pres/(1.0-0.00266*cos(2.0*pos[0])-0.00028*hgt/1E3)/cos(z);
trpw=0.002277*(1255.0/temp+0.05)*e/cos(z);
return trph+trpw;
}边栏推荐
- Solution to the problem of UOS boot prompt unlocking login password ring
- 1D convolution detail
- Sequoia China, just raised $9billion
- 华为在多个行业同时出击,吓人的技术让欧美企业瑟瑟发抖
- 小满网络模型&http1-http2 &浏览器缓存
- High precision face recognition based on insightface, which can directly benchmark hongruan
- Method return value considerations
- Summary of cross partition scheme
- OpenCV300 CMake生成project在项目过程中的问题
- Sql: stored procedures and triggers - Notes
猜你喜欢

Sparkshuffle process and Mr shuffle process

Huawei has launched attacks in many industries at the same time, and its frightening technology has made European and American enterprises tremble
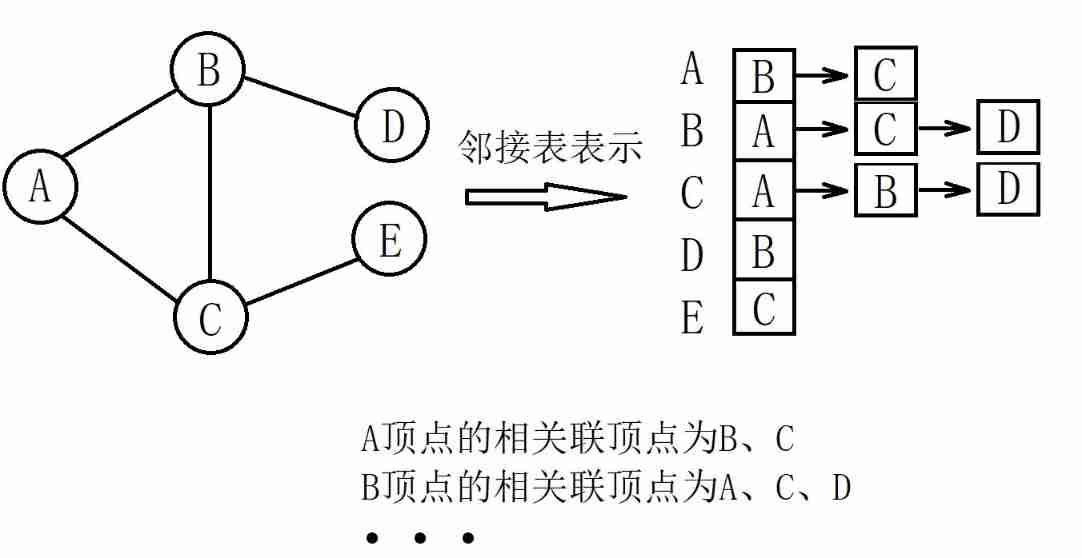
Basic introduction of figure

Leetcode learning records (starting from the novice village, you can't kill out of the novice Village) ---1
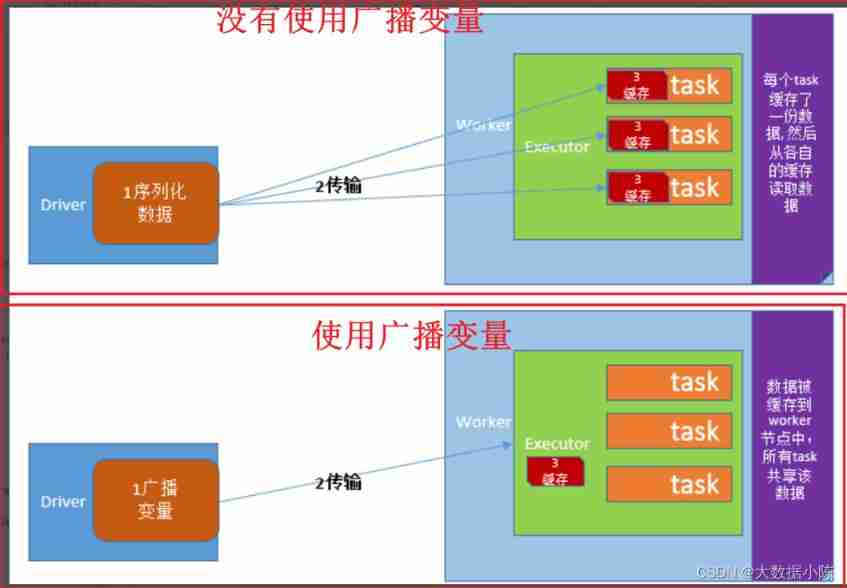
Broadcast variables and accumulators in spark
PostgreSQL modifies the password of the database user
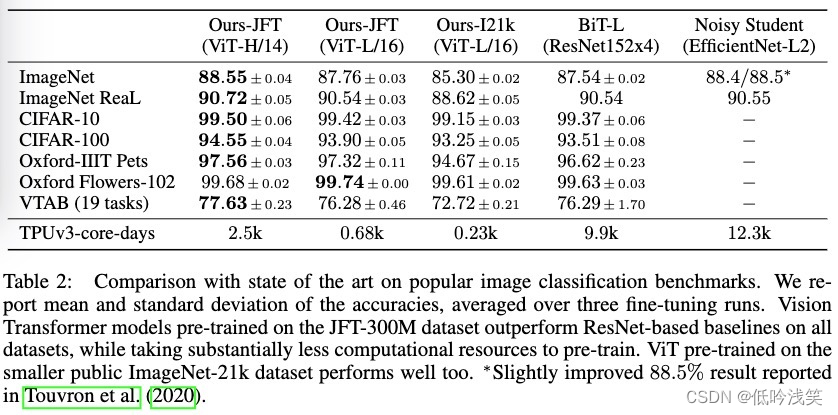
ViT论文详解
![Some problems about the use of char[] array assignment through scanf..](/img/cf/d85a3172c5d29ac00377f9c30dbc4f.png)
Some problems about the use of char[] array assignment through scanf..

Quick news: the flybook players' conference is held online; Wechat payment launched "education and training service toolbox"
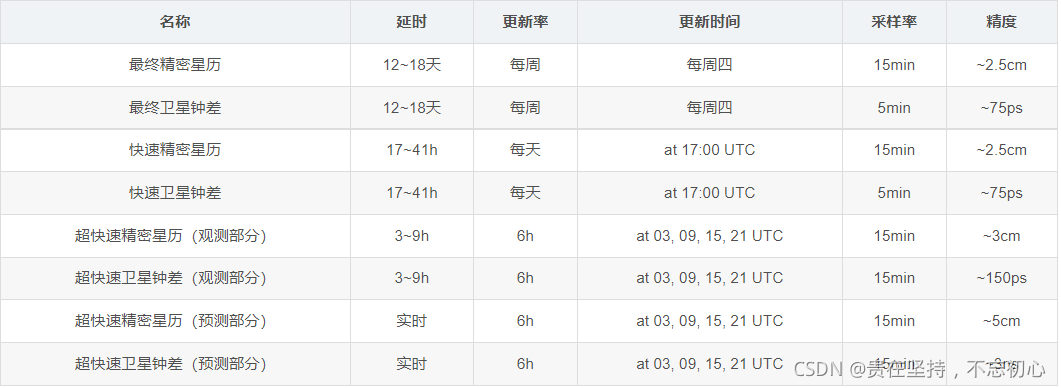
GPS从入门到放弃(十九)、精密星历(sp3格式)
随机推荐
Leveldb source code analysis series - main process
Z function (extended KMP)
GPS从入门到放弃(十三)、接收机自主完好性监测(RAIM)
Aggregate function with key in spark
Oracle性能分析3:TKPROF简介
新入职一家公司需要去实践和注意的内容
HDU 2008 数字统计
What can one line of code do?
npm run dev启动项目报错 document is not defined
Redistemplate common collection instructions opsforlist (III)
R3live notes: image processing section
Earned value management EVM detailed explanation and application, example explanation
C language: comprehensive application of if, def and ifndef
Kohana 数据库
ROS error: could not find a package configuration file provided by "move_base“
麦趣尔砸了小众奶招牌
Caching strategies overview
[Yu Yue education] reference materials for surgical skills teaching in Tongji University
Bat script learning (I)
[go][reprint]vscode run a HelloWorld example after configuring go