当前位置:网站首页>open3d学习笔记三【采样与体素化】
open3d学习笔记三【采样与体素化】
2022-07-02 06:26:00 【寂云萧】
open3d学习笔记之体素化
一、补充一些小知识
1、以mesh方式读取ply文件
import open3d as o3d
mesh = o3d.io.read_triangle_mesh("mode/Fantasy Dragon.ply")
mesh.compute_vertex_normals()

2.旋转矩阵
三维模型使用R,T两个参数来变换,视图的空间坐标系建立:向上为z轴,向右为y轴,x轴指向屏幕前。使用transform方法变换坐标,变换矩阵为[4*4]的矩阵,transform([[R, T], [0, 1]])。
正常读取一个ply文件:
import open3d as o3d
pcd = o3d.io.read_point_cloud("mode/Fantasy Dragon.ply")
o3d.visualization.draw_geometries([pcd], width=1280, height=720)
显示效果如图: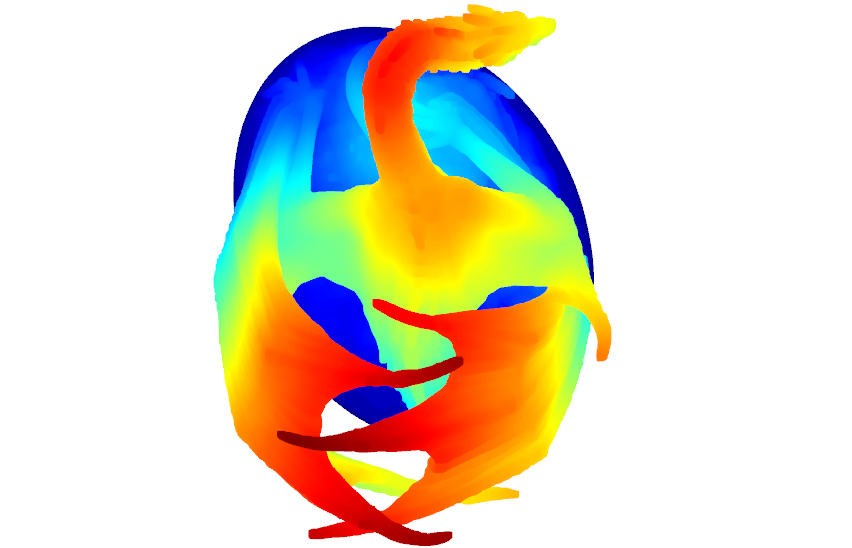
使用转换函数,把他横着放,且头部面向屏幕。那么就是将原来的z轴换到y轴,y轴换到x轴,x轴换到z轴,所以代码为:
import open3d as o3d
mesh = o3d.io.read_triangle_mesh("mode/Fantasy Dragon.ply")
mesh.compute_vertex_normals()
mesh.transform([[0, 1, 0, 0], [0, 0, 1, 0], [1, 0, 0, 0], [0, 0, 0, 1]])
o3d.visualization.draw_geometries([mesh], width=1280, height=720)
效果:
二、转化为点云的方式
1、转化为numpy数组再重新绘制成点云
import open3d as o3d
import numpy as np
mesh = o3d.io.read_triangle_mesh("mode/Fantasy Dragon.ply")
mesh.compute_vertex_normals()
v_mesh = np.asarray(mesh.vertices)
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(v_mesh)
o3d.visualization.draw_geometries([pcd], width=1280, height=720)

对于ply格式的文件还好,但若是stl这种三角形网格,转化的结果会有点不理想。
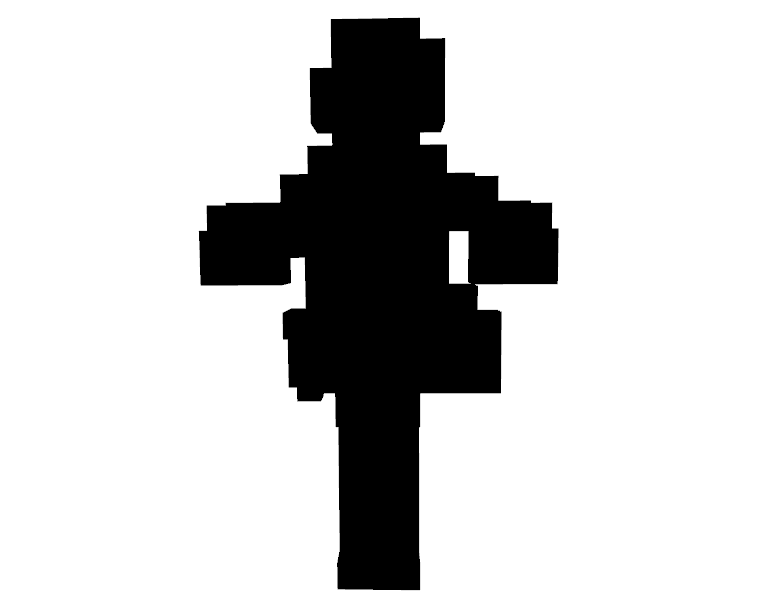
2、采样
open3d提供了一种采样方式,可设置采样点,简化模型。
import open3d as o3d
mesh = o3d.io.read_triangle_mesh("mode/ganyu.STL")
mesh.compute_vertex_normals()
pcd = o3d.geometry.TriangleMesh.sample_points_uniformly(mesh, number_of_points=10000) # 采样点云
o3d.visualization.draw_geometries([pcd], width=1280, height=720)

三、体素化
体素化,能简化模型,得到均匀网格。
将三角网格转化为体素网格
import open3d as o3d
import numpy as np
print("Load a ply point cloud, print it, and render it")
mesh = o3d.io.read_triangle_mesh("mode/ganyu.STL")
mesh.compute_vertex_normals()
mesh.scale(1 / np.max(mesh.get_max_bound() - mesh.get_min_bound()), center=mesh.get_center())
voxel_grid = o3d.geometry.VoxelGrid.create_from_triangle_mesh(mesh, voxel_size=0.05)
o3d.visualization.draw_geometries([voxel_grid], width=1280, height=720)
点云生成体素网格
import open3d as o3d
import numpy as np
print("Load a ply point cloud, print it, and render it")
pcd = o3d.io.read_point_cloud("mode/Fantasy Dragon.ply")
pcd.scale(1 / np.max(pcd.get_max_bound() - pcd.get_min_bound()), center=pcd.get_center())
pcd.colors = o3d.utility.Vector3dVector(np.random.uniform(0,1,size=(2000,3)))
print('voxelization')
voxel_grid = o3d.geometry.VoxelGrid.create_from_point_cloud(pcd, voxel_size=0.05)
o3d.visualization.draw_geometries([voxel_grid], width=1280, height=720)

四、顶点法线估计
voxel_down_pcd = pcd.voxel_down_sample(voxel_size=0.05)
voxel_down_pcd.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
o3d.visualization.draw_geometries([voxel_down_pcd], point_show_normal=True, width=1280, height=720)
estimate_normals计算每个点的法线。该函数查找相邻点并使用协方差分析计算相邻点的主轴。
该函数将KDTreeSearchParamHybrid类的实例作为参数。两个关键参数为指定搜索半径和最大最近邻。radius=0.1, max_nn=30即以10cm为搜索半径,并最多只考虑30个临近点以节省计算时间。

读取法线向量
print("打印第一个向量:")
print(voxel_down_pcd.normals[0])
#打印第一个向量:
#[ 0.51941952 0.82116269 -0.23642166]
#打印前十个法线向量
print(np.asarray(voxel_down_pcd.normals)[:10,:])
五、值得注意的点
- pcd格式文件属于点云类型,ply可同时使用点云以及网格方式读取,用mesh读取时,可当三角网格处理,用pcd读取可直接当点云数据处理。
- 三角网格直接采样再计算法线会出现法线标注出错的情况,即法线全部指向一个方向。
- 要避免采样法线出错可使用
sample_points_poisson_disk()方法采样。
边栏推荐
- What if a new window always pops up when opening a folder on a laptop
- 机器学习理论学习:感知机
- MoCO ——Momentum Contrast for Unsupervised Visual Representation Learning
- Yolov3 trains its own data set (mmdetection)
- A slide with two tables will help you quickly understand the target detection
- TimeCLR: A self-supervised contrastive learning framework for univariate time series representation
- parser. parse_ Args boolean type resolves false to true
- Drawing mechanism of view (I)
- 【Sparse-to-Dense】《Sparse-to-Dense:Depth Prediction from Sparse Depth Samples and a Single Image》
- Mmdetection model fine tuning
猜你喜欢
What if the notebook computer cannot run the CMD command
![[introduction to information retrieval] Chapter 3 fault tolerant retrieval](/img/75/ac2fdcd256f5c2336ca53c7a2744b8.png)
[introduction to information retrieval] Chapter 3 fault tolerant retrieval

SSM supermarket order management system

【DIoU】《Distance-IoU Loss:Faster and Better Learning for Bounding Box Regression》
Play online games with mame32k
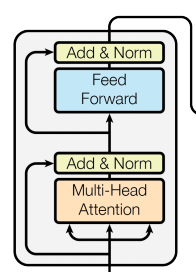
【深度学习系列(八)】:Transoform原理及实战之原理篇
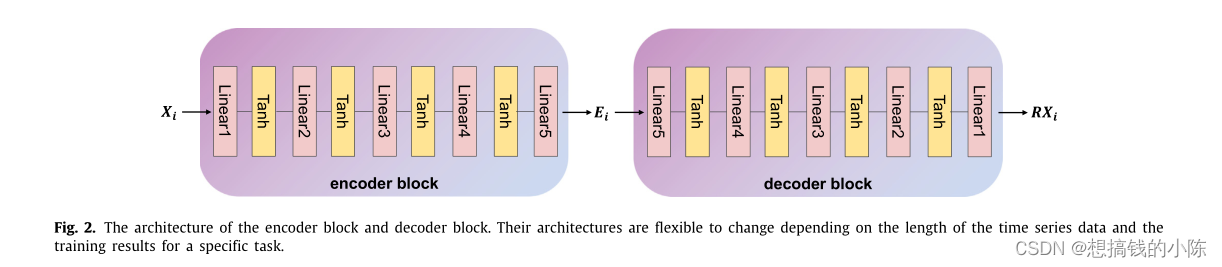
TimeCLR: A self-supervised contrastive learning framework for univariate time series representation

机器学习理论学习:感知机
【Programming】
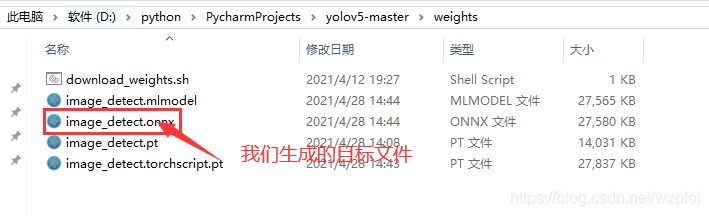
基于onnxruntime的YOLOv5单张图片检测实现
随机推荐
Deep learning classification Optimization Practice
Find in laravel8_ in_ Usage of set and upsert
How to turn on night mode on laptop
CONDA common commands
【Cutout】《Improved Regularization of Convolutional Neural Networks with Cutout》
【Mixup】《Mixup:Beyond Empirical Risk Minimization》
Convert timestamp into milliseconds and format time in PHP
【Mixup】《Mixup:Beyond Empirical Risk Minimization》
Point cloud data understanding (step 3 of pointnet Implementation)
[tricks] whiteningbert: an easy unsupervised sentence embedding approach
Play online games with mame32k
[introduction to information retrieval] Chapter 3 fault tolerant retrieval
parser. parse_ Args boolean type resolves false to true
常见的机器学习相关评价指标
Conversion of numerical amount into capital figures in PHP
Typeerror in allenlp: object of type tensor is not JSON serializable error
ModuleNotFoundError: No module named ‘pytest‘
MMDetection安装问题
Common CNN network innovations
A slide with two tables will help you quickly understand the target detection