当前位置:网站首页>How do I dump SoapClient requests for debugging- How to dump SoapClient request for debug?
How do I dump SoapClient requests for debugging- How to dump SoapClient request for debug?
2022-07-07 02:19:00 【javail】
problem :
I need to debug some code which uses soap client. I need to debug some usage soap Client code .I found getLast* methods in php.net, but when I try to get last request for debug it returns NULL I am here php.net Found in the getLast* Method , But when I try to get the last debug request , It returns NULL
<?php $client = new SoapClient("http://www.webservicex.net/ConverPower.asmx?WSDL"); $response = $client->ChangePowerUnit(array( "PowerValue" => 100, "fromPowerUnit" => "horsepower", "toPowerUnit" => "megawatts" )); echo "====== REQUEST HEADERS =====" . PHP_EOL; var_dump($client->__getLastRequestHeaders()); echo "========= REQUEST ==========" . PHP_EOL; var_dump($client->__getLastRequest()); echo "========= RESPONSE =========" . PHP_EOL; var_dump($response);?>The result of code execution: Code execution result :
$php soap_test.php ====== REQUEST HEADERS =====NULL========= REQUEST ==========NULL========= RESPONSE =========object(stdClass)#2 (1) { ["ChangePowerUnitResult"]=> float(0.0746)}How to get the content of body and headers of the last SoapClient request? How to get the last one SoapClient The content of the body and title of the request ?
Solution :
Reference resources : https://stackoom.com/en/question/wru0边栏推荐
- 云原生混部最后一道防线:节点水位线设计
- Halcon实例转OpenCvSharp(C# OpenCV)实现--瓶口缺陷检测(附源码)
- Jacob Steinhardt, assistant professor of UC Berkeley, predicts AI benchmark performance: AI has made faster progress in fields such as mathematics than expected, but the progress of robustness benchma
- ROS学习(22)TF变换
- 3D laser slam: time synchronization of livox lidar hardware
- Centos8 install MySQL 8.0 using yum x
- 传感器:土壤湿度传感器(XH-M214)介绍及stm32驱动代码
- ROS learning (22) TF transformation
- 如何从0到1构建32Core树莓派集群
- ROS learning (24) plugin
猜你喜欢
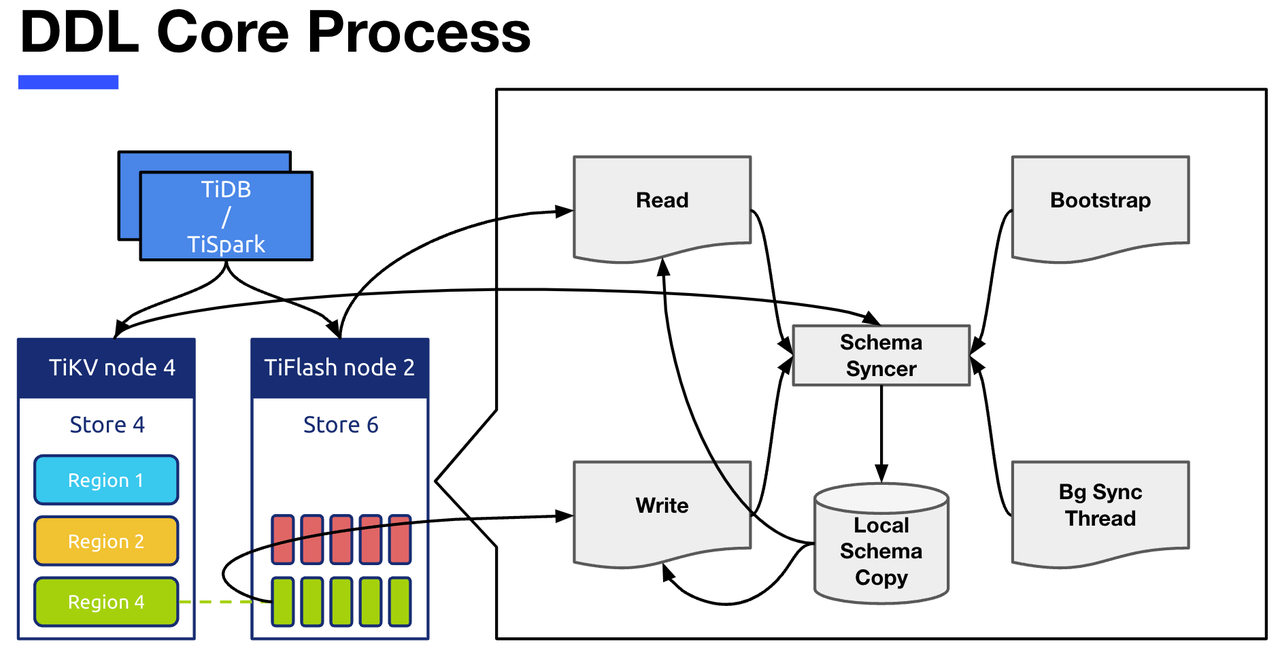
Tiflash source code reading (IV) design and implementation analysis of tiflash DDL module
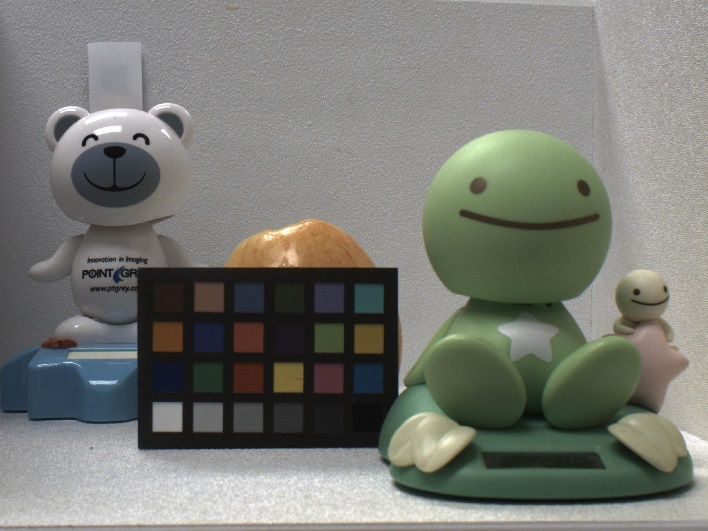
FLIR blackfly s usb3 industrial camera: white balance setting method
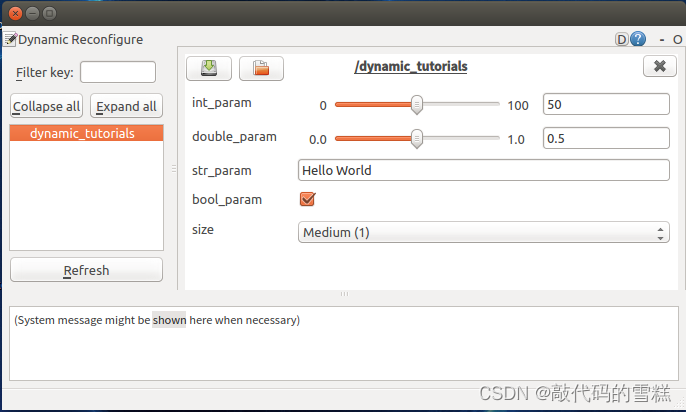
ROS learning (26) dynamic parameter configuration

Zhang Ping'an: accelerate cloud digital innovation and jointly build an industrial smart ecosystem
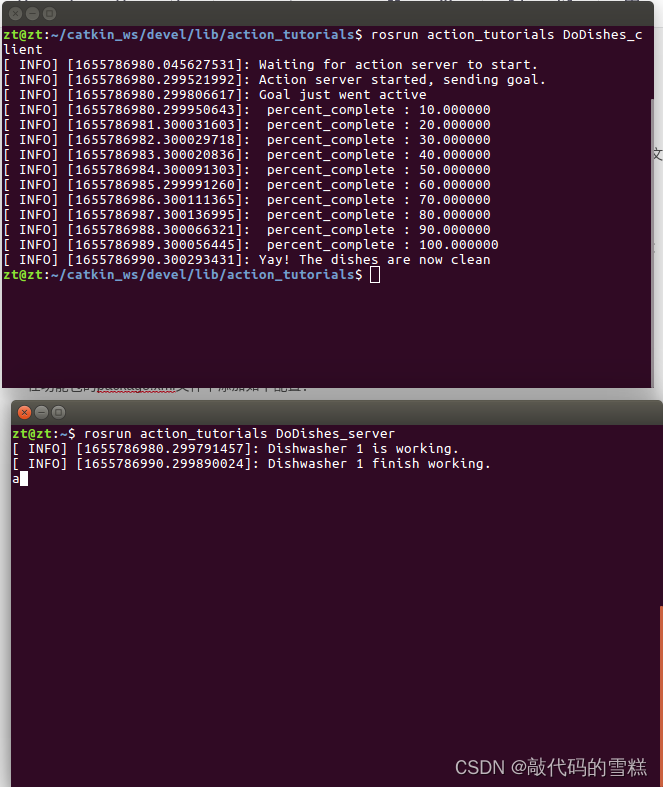
ROS learning (23) action communication mechanism

MySQL execution process and sequence
Robot team learning method to achieve 8.8 times human return
sql中批量删除数据---实体中的集合
Stm32f4 --- general timer update interrupt

微服务架构介绍
随机推荐
ROS学习(22)TF变换
FLIR blackfly s industrial camera: synchronous shooting of multiple cameras through external trigger
使用Ceres进行slam必须要弄清楚的几个类和函数
6 seconds to understand the book to the Kindle
How to use strings as speed templates- How to use String as Velocity Template?
FLIR blackfly s industrial camera: auto exposure configuration and code
3D激光SLAM:Livox激光雷达硬件时间同步
ROS学习(25)rviz plugin插件
ROS learning (21) robot slam function package -- installation and testing of orbslam
企业中台建设新路径——低代码平台
[leetcode] day97 remove linked list elements
ROS learning (25) rviz plugin
【论文阅读|深读】 GraphSAGE:Inductive Representation Learning on Large Graphs
Vingt - trois mille feuilles? "Yang mou" derrière l'explosion de la consommation végétale
ROS learning (24) plugin
开发中对集合里面的数据根据属性进行合并数量时犯的错误
Stm32f4 --- PWM output
Cat recycling bin
Freeswitch dials extension number source code tracking
Yyds dry goods inventory # solve the real problem of famous enterprises: maximum difference