当前位置:网站首页>Chapter 7 Bayesian classifier
Chapter 7 Bayesian classifier
2022-07-08 01:07:00 【Intelligent control and optimization decision Laboratory of Cen】
1. Explain a priori probability 、 Posterior probability 、 All probability formula 、 Conditional probability formula , The Bayesian formula is illustrated with examples , How to understand Bayesian theorem ?
- Prior probability
Prior probability P ( c ) P(c) P(c) It expresses the proportion of various samples in the sample space , According to the law of large numbers , When the training set contains sufficient independently distributed samples , P ( c ) P(c) P(c) It can be estimated by the frequency of occurrence of various samples . - Posterior probability
Delay probability P ( c ∣ x ) P(c|x) P(c∣x), It can be understood as in category c c c In the training set x x x The so-called “ The probability of real occurrence ” - All probability formula
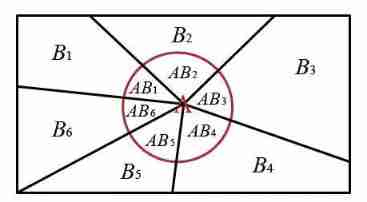
As shown in the figure , A sample space S S S By B 1 , B 2 . . . B 6 B_1,B_2...B_6 B1,B2...B6 Such a complete event group is perfectly divided , Events marked in the red circle A A A It has also been ruthlessly decomposed into various parts , Now our fragmented event A A A Put it together :
P ( A ) = P ( A B 1 ) + P ( A B 2 ) + . . . + P ( A B 6 ) = P ( A ∣ B 1 ) P ( B 1 ) + P ( A ∣ B 2 ) P ( B 2 ) + . . . P ( A ∣ B 6 ) P ( B 6 ) P(A)=P(AB_1)+P(AB_2)+...+P(AB_6)\\=P(A|B_1)P(B_1)+P(A|B_2)P(B_2)+...P(A|B_6)P(B_6) P(A)=P(AB1)+P(AB2)+...+P(AB6)=P(A∣B1)P(B1)+P(A∣B2)P(B2)+...P(A∣B6)P(B6) - Conditional probability formula
P ( A ∣ B ) P(A|B) P(A∣B) In the event of B B B Under the condition of occurrence , event A A A Probability of occurrence - Bayes' formula
P ( B i ∣ A ) = P ( B i A ) P ( A ) = P ( A ∣ B i ) P ( B i ) ∑ j = 1 n P ( A ∣ B j ) P ( B j ) P(B_i|A)=\frac{P(B_iA)}{P(A)}=\frac{P(A|B_i)P(B_i)}{\sum_{j=1}^{n}P(A|B_j)P(B_j)} P(Bi∣A)=P(A)P(BiA)=∑j=1nP(A∣Bj)P(Bj)P(A∣Bi)P(Bi)
In a nutshell , Bayesian theorem is a priori probability based on hypothesis 、 The probability of observing different data under given assumptions , A method for calculating a posteriori probability is provided .
2. An example is given to illustrate how naive Bayesian classifier classifies test samples ? And summarize the algorithm steps .
Naive Bayes is an independent expression of Bayesian evidence , It belongs to a special case . Bayesian expression is very complex in practical application , But we hope to split it into several naive Bayes to express , In this way, the posterior probability can be obtained quickly .
The basic idea of naive Bayes : For a given item to be classified x x x{ x 1 , x 2 , . . . x n x1,x2,...xn x1,x2,...xn} , Solve each category under the conditions appearing in this item c i c_i ci Probability of occurrence . Which one? P ( c i ∣ x ) P(c_i|x) P(ci∣x) Maximum , Which category does the item to be classified belong to .
Algorithm steps :
1
One for each data sample n Dimension eigenvector x = x= x= { x 1 , x 2 , . . . x n x1,x2,...xn x1,x2,...xn} Express , Describe the right n Attributes A 1 , A 2 , . . . A n A1,A2,...An A1,A2,...An Of the sample n A measure .2
Suppose there is m Classes c 1 , c 2 , . . . , c m c_1,c_2,...,c_m c1,c2,...,cm , Given an unknown data sample x x x, The classifier will predict x x x It belongs to the class with the highest a posteriori probability . in other words , Naive Bayesian classification assigns unknown samples to classes c i ( 1 ⩽ i ⩽ m ) c_i (1\leqslant i \leqslant m ) ci(1⩽i⩽m) If and only if P ( c i ∣ x ) > P ( c j ∣ x ) i ≠ j P(c_i|x)>P(c_j|x) \ \ i \neq j P(ci∣x)>P(cj∣x) i=j . such , Maximize P ( c i ∣ x ) P(c_i|x) P(ci∣x). Its P ( c i ∣ x ) P(c_i|x) P(ci∣x) The largest class c i c_i ci It is called the maximum a posteriori assumption . According to Bayes theorem :
P ( c i ∣ x ) = P ( x ∣ c i ) P ( c i ) P ( x ) P(c_i|x)=\frac{P(x|c_i)P(c_i)}{P(x)} P(ci∣x)=P(x)P(x∣ci)P(ci)3
because P ( x ) P(x) P(x) Constant for all classes , It only needs P ( x ∣ c i ) P ( c i ) {P(x|c_i)P(c_i)} P(x∣ci)P(ci) The biggest one is . If c i c_i ci The prior probability of the class is unknown , It is usually assumed that these classes are equal probability , namely P ( c 1 ) = P ( c 2 ) = . . . = P ( c m ) P(c_1)=P(c_2)=...=P(c_m) P(c1)=P(c2)=...=P(cm) , So it turns into right P ( x ∣ c i ) P(x|c_i) P(x∣ci) To maximize ( P ( x ∣ c i ) P(x|c_i) P(x∣ci) It is often called given c i c_i ci Time data x x x The likelihood of , And make P ( x ∣ c i ) P(x|c_i) P(x∣ci) The biggest assumption c i c_i ci It is called maximum likelihood . otherwise , Need to maximize P ( x ∣ c i ) P ( c i ) {P(x|c_i)P(c_i)} P(x∣ci)P(ci). Be careful , The prior probability of a class can be used P ( c i ) = s i / s P(c_i)=s_i / s P(ci)=si/s Calculation , among s i s_i si yes c i c_i ci Number of training samples in , s s s Is the total number of training samples .4
Given a dataset with many attributes , Calculation P ( x ∣ c i ) P(x|c_i) P(x∣ci) The cost of can be very large . To reduce the calculation P ( x ∣ c i ) P(x|c_i) P(x∣ci) The cost of , We can make the simple assumption of class conditional independence . The class label of the given sample , Assume that attribute values are conditionally independent of each other , That is, between attributes , There are no dependencies . In this way, only molecules need to be considered :
P ( x ∣ c i ) = ∏ k = 1 n P ( x k ∣ c i ) P(x|c_i)=\prod_{k=1}^{n}P(x_k|c_i) P(x∣ci)=k=1∏nP(xk∣ci)5
For unknown samples x x x classification , That is, for each class c i c_i ci, Calculation P ( x ∣ c i ) P ( c i ) {P(x|c_i)P(c_i)} P(x∣ci)P(ci) , Naive Bayesian classification assigns unknown samples to classes c i ( 1 ⩽ i ⩽ m ) c_i (1\leqslant i \leqslant m ) ci(1⩽i⩽m) If and only if P ( c i ∣ x ) > P ( c j ∣ x ) i ≠ j P(c_i|x)>P(c_j|x) \ \ i \neq j P(ci∣x)>P(cj∣x) i=j . such , x x x Assigned to its P ( x ∣ c i ) P ( c i ) {P(x|c_i)P(c_i)} P(x∣ci)P(ci) The largest class .
The flow chart is shown in the figure below :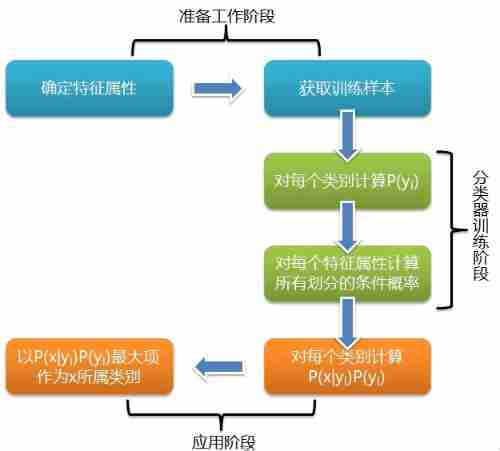
The example analysis
There is a batch of products of the same model , It is known that the production of one factory accounts for 15%, The production of the second factory accounts for 80%, The production of the three plants accounts for 5%, It is also known that the defective rates of these three factories are 2%,1%,3%. Any one of these products is defective , Ask which factory this defective product belongs to with the greatest probability :
set up A A A Express “ What I got was a defective one ”, B i B_i Bi Express “ The defective products obtained are from i Provided by factory ”, be B 1 , B 2 , B 3 B_1,B_2,B_3 B1,B2,B3 It's sample space Ω \Omega Ω A division of , And P ( B 1 ) = 0.5 , P ( B 2 ) = 0.80 , P ( B 3 = 0.05 ) P(B_1)=0.5,P(B_2)=0.80,P(B_3=0.05) P(B1)=0.5,P(B2)=0.80,P(B3=0.05)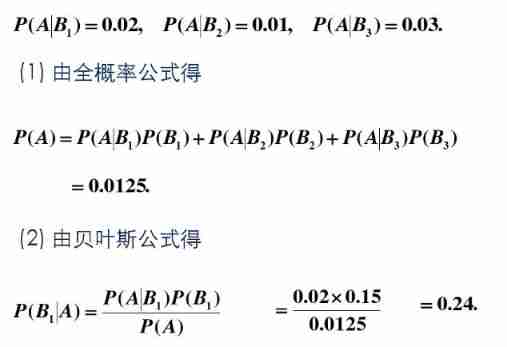
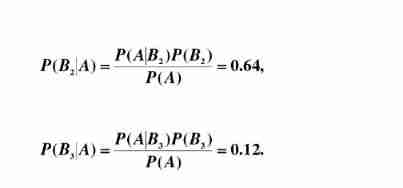
thus it can be seen , The probability from factory two is the highest .
3. Explain how to use maximum likelihood estimation and Bayesian estimation to estimate the parameters of naive Bayes .
Maximum likelihood estimation
Maximum likelihood estimate the parameters to be estimated θ \theta θ It is regarded as an unknown variable in a fixed form , Then we combine the real data to solve this fixed form of position variable by maximizing the likelihood function . The specific solving process is as follows :Hypothesis sample set D = D= D= { x 1 , x 2 , . . . x n x_1,x_2,...x_n x1,x2,...xn}, Suppose that the samples are relatively independent , So there is :
P ( D ∣ θ ) = P ( x 1 ∣ θ ) P ( x 2 ∣ θ ) . . . P ( x n ∣ θ ) P(D|\theta)=P(x_1|\theta)P(x_2|\theta)...P(x_n|\theta) P(D∣θ)=P(x1∣θ)P(x2∣θ)...P(xn∣θ)
So suppose the likelihood function is :
L ( θ ∣ D ) = ∏ k = 1 n P ( x k ∣ θ ) L(\theta|D)=\prod_{k=1}^{n}P(x_k|\theta) L(θ∣D)=k=1∏nP(xk∣θ)
Next, our criterion for finding parameters is to maximize the likelihood function as the name :
θ = a r g max θ L ( θ ∣ D ) \theta =arg \max_\theta L(\theta|D) θ=argθmaxL(θ∣D)Bayesian estimation
Bayesian estimation treats parameters as random variables with a known prior distribution , This means that this parameter is not a fixed unknown , It conforms to a certain prior distribution, such as : A random variable θ \theta θ Conform to normal distribution, etc .
- Finally, Bayesian estimation is also to obtain a posteriori probability , What it ultimately derives is :
P ( w i ∣ x , D ) = P ( w i ∣ x , D ) P ( x , D ) = P ( w i , x , D ) ∑ j = 1 c P ( w i , x , D ) P(w_i|x,D)=\frac{P(w_i|x,D)}{P(x,D)}=\frac{P(w_i,x,D)}{\sum_{j=1}^{c} P(w_i,x,D)} P(wi∣x,D)=P(x,D)P(wi∣x,D)=∑j=1cP(wi,x,D)P(wi,x,D)
There are in the above formula :
P ( w i , x , D ) = P ( x ∣ w i , D ) P ( w i ) ∑ j = 1 c P ( w i , x , D ) P(w_i,x,D)=\frac{P(x|w_i,D)P(w_i)}{\sum_{j=1}^{c} P(w_i,x,D)} P(wi,x,D)=∑j=1cP(wi,x,D)P(x∣wi,D)P(wi)
There is also an important assumption , That is, the samples are independent of each other , At the same time, classes are also independent , So there are the following assumptions :
P ( w i ∣ D ) = P ( w i ) P ( x ∣ w i , D ) = P ( x ∣ w i , D i ) P(w_i|D)=P(w_i) \\ P(x|w_i,D)=P(x|w_i,D_i) P(wi∣D)=P(wi)P(x∣wi,D)=P(x∣wi,Di)
At the same time, because classes are independent of each other , Then there is :
P ( x ∣ w i , D i ) = P ( x ∣ D ) P(x|w_i,D_i)= P(x|D) P(x∣wi,Di)=P(x∣D)
Similar to the derivation of maximum likelihood function , Available :
P ( D ∣ θ ) = ∏ k = 1 n P ( x k ∣ θ ) P(D|\theta)=\prod_{k=1}^{n}P(x_k|\theta) P(D∣θ)=k=1∏nP(xk∣θ)
So we finally get :
P ( x ∣ D ) = ∫ P ( x ∣ θ ) P ( θ ∣ D ) d θ P(x|D)=\int P(x|\theta)P(\theta|D)d\theta P(x∣D)=∫P(x∣θ)P(θ∣D)dθ
4. Programming Laplace modified naive Bayesian classifier , And watermelon dataset 3.0 For example (P84), Yes P151 Test samples of 1 To judge .
// An highlighted block
import xlrd
import math
class LaplacianNB():
"""
Laplacian naive bayes for binary classification problem.
"""
def __init__(self):
"""
"""
def train(self, X, y):
"""
Training laplacian naive bayes classifier with traning set (X, y).
Input:
X: list of instances. Each instance is represented by
y: list of labels. 0 represents bad, 1 represents good.
"""
N = len(y)
self.classes = self.count_list(y)
self.class_num = len(self.classes)
self.classes_p = {
}
#print self.classes
for c, n in self.classes.items():
self.classes_p[c] = float(n+1) / (N+self.class_num)
self.discrete_attris_with_good_p = []
self.discrete_attris_with_bad_p = []
for i in range(6):
attr_with_good = []
attr_with_bad = []
for j in range(N):
if y[j] == 1:
attr_with_good.append(X[j][i])
else:
attr_with_bad.append(X[j][i])
unique_with_good = self.count_list(attr_with_good)
unique_with_bad = self.count_list(attr_with_bad)
self.discrete_attris_with_good_p.append(self.discrete_p(unique_with_good, self.classes[1]))
self.discrete_attris_with_bad_p.append(self.discrete_p(unique_with_bad, self.classes[0]))
self.good_mus = []
self.good_vars = []
self.bad_mus = []
self.bad_vars = []
for i in range(2):
attr_with_good = []
attr_with_bad = []
for j in range(N):
if y[j] == 1:
attr_with_good.append(X[j][i+6])
else:
attr_with_bad.append(X[j][i+6])
good_mu, good_var = self.mu_var_of_list(attr_with_good)
bad_mu, bad_var = self.mu_var_of_list(attr_with_bad)
self.good_mus.append(good_mu)
self.good_vars.append(good_var)
self.bad_mus.append(bad_mu)
self.bad_vars.append(bad_var)
def predict(self, x):
"""
"""
p_good = self.classes_p[1]
p_bad = self.classes_p[0]
for i in range(6):
p_good *= self.discrete_attris_with_good_p[i][x[i]]
p_bad *= self.discrete_attris_with_bad_p[i][x[i]]
for i in range(2):
p_good *= self.continuous_p(x[i+6], self.good_mus[i], self.good_vars[i])
p_bad *= self.continuous_p(x[i+6], self.bad_mus[i], self.bad_vars[i])
if p_good >= p_bad:
return p_good, p_bad, 1
else:
return p_good, p_bad, 0
def count_list(self, l):
"""
Get unique elements in list and corresponding count.
"""
unique_dict = {
}
for e in set(l):
unique_dict[e] = l.count(e)
return unique_dict
def discrete_p(self, d, N_class):
"""
Compute discrete attribution probability based on {
0:, 1:, 2: }.
"""
new_d = {
}
#print d
for a, n in d.items():
new_d[a] = float(n+1) / (N_class + len(d))
return new_d
def continuous_p(self, x, mu, var):
p = 1.0 / (math.sqrt(2*math.pi) * math.sqrt(var)) * math.exp(- (x-mu)**2 /(2*var))
return p
def mu_var_of_list(self, l):
mu = sum(l) / float(len(l))
var = 0
for i in range(len(l)):
var += (l[i]-mu)**2
var = var / float(len(l))
return mu, var
if __name__=="__main__":
lnb = LaplacianNB()
workbook = xlrd.open_workbook("../../ data /3.0.xlsx")
sheet = workbook.sheet_by_name("Sheet1")
X = []
for i in range(17):
x = sheet.col_values(i)
for j in range(6):
x[j] = int(x[j])
x.pop()
X.append(x)
y = sheet.row_values(8)
y = [int(i) for i in y]
#print X, y
lnb.train(X, y)
#print lnb.discrete_attris_with_good_p
label = lnb.predict([1, 1, 1, 1, 1, 1, 0.697, 0.460])
print "predict ressult: ", label
result :
// An highlighted block
predict ressult: (0.03191920486294201, 4.9158340214165893e-05, 1)# They are positive probability , Parent class probability and classification results
边栏推荐
猜你喜欢

随机推荐
Semantic segmentation model base segmentation_ models_ Detailed introduction to pytorch
Lecture 1: the entry node of the link in the linked list
取消select的默认样式的向下箭头和设置select默认字样
Swift get URL parameters
Langchao Yunxi distributed database tracing (II) -- source code analysis
13. Model saving and loading
网络模型的保存与读取
New library online | cnopendata China Star Hotel data
Stock account opening is free of charge. Is it safe to open an account on your mobile phone
[go record] start go language from scratch -- make an oscilloscope with go language (I) go language foundation
133. Clone map
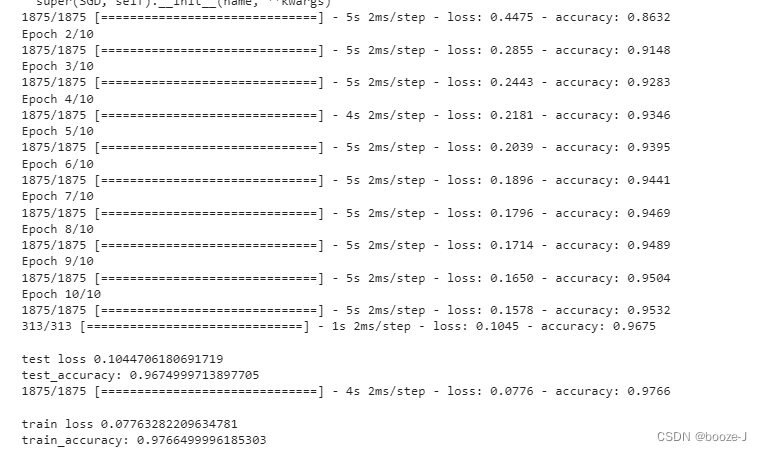
3.MNIST数据集分类
Get started quickly using the local testing tool postman
英雄联盟胜负预测--简易肯德基上校
Mathematical modeling -- knowledge map
Codeforces Round #804 (Div. 2)
Cross modal semantic association alignment retrieval - image text matching
Using GPU to train network model
Vscode is added to the right-click function menu
130. 被圍繞的區域