当前位置:网站首页>NPM and package common commands
NPM and package common commands
2022-07-05 07:12:00 【Weft collar network】
npm install npm uninstall3、 Install the specified package and record it to devDependencies node
npm i Package name -D4、 View the current package image source
npm config get registry4、 Switch the image source of the next package to Taobao image source
npm config set registry=https://registry.npm.taobao.org/5、 adopt npm Package manager , take nrm Install as a globally available tool
npm i nrm -g6、 View all available mirror sources
nrm ls7、 Switch the image source of the next package to taobao Mirror image
nrm use taobao8、 View the packages that have been installed
npm list -g --depth 0 边栏推荐
- mingling
- 网易To B,柔外刚中
- Powermanagerservice (I) - initialization
- Spinningup drawing curve
- mysql设置触发器问题
- SD_CMD_RECEIVE_SHIFT_REGISTER
- 使用paping工具进行tcp端口连通性检测
- Do you choose pandas or SQL for the top 1 of data analysis in your mind?
- Mipi interface, DVP interface and CSI interface of camera
- MySQL setting trigger problem
猜你喜欢


随机推荐
ethtool 原理介绍和解决网卡丢包排查思路(附ethtool源码下载)
Ros2 - node (VII)
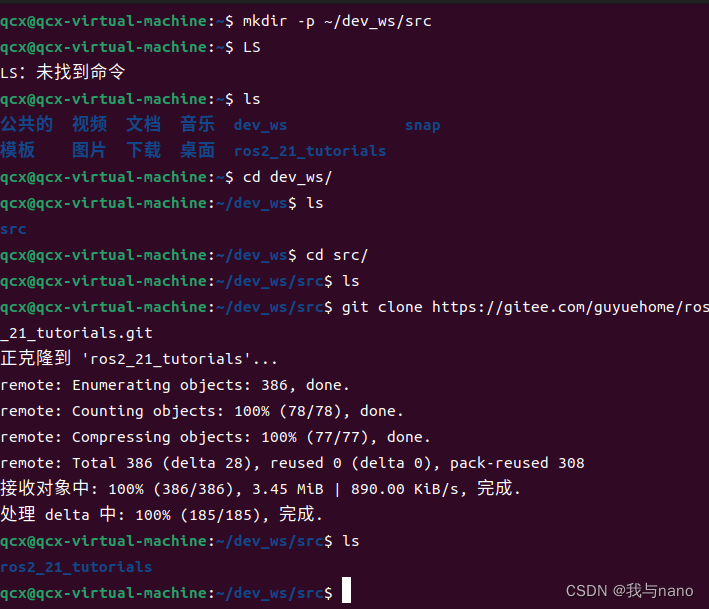
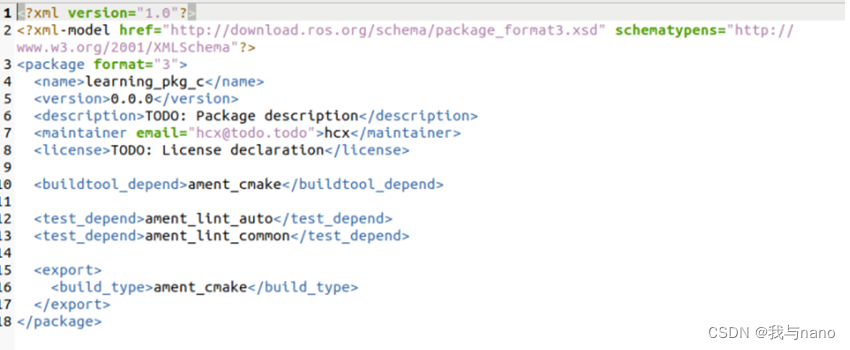
ROS2——工作空间(五)
【软件测试】06 -- 软件测试的基本流程
Volcano resource reservation feature
npm install -g/--save/--save-dev的区别
全局变量和静态变量的初始化
ROS2——node节点(七)
Concurrent programming - how to interrupt / stop a running thread?
The difference between new and malloc
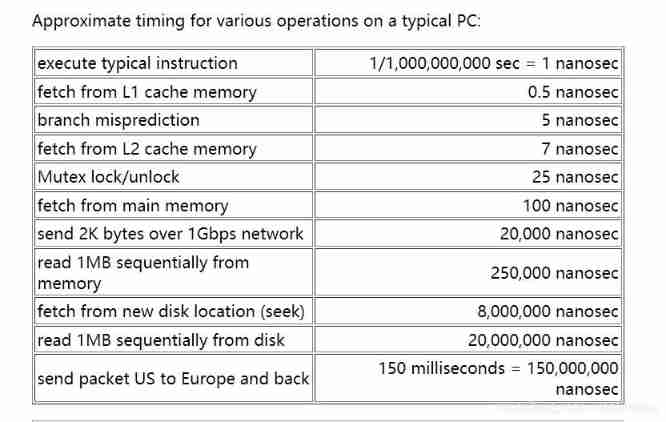
Instruction execution time
Edge calculation data sorting
Three body goal management notes
你心目中的数据分析 Top 1 选 Pandas 还是选 SQL?
SD_CMD_RECEIVE_SHIFT_REGISTER
mingling
[nvidia] CUDA_ VISIBLE_ DEVICES
Ret2xx---- common CTF template proposition in PWN
Empire help
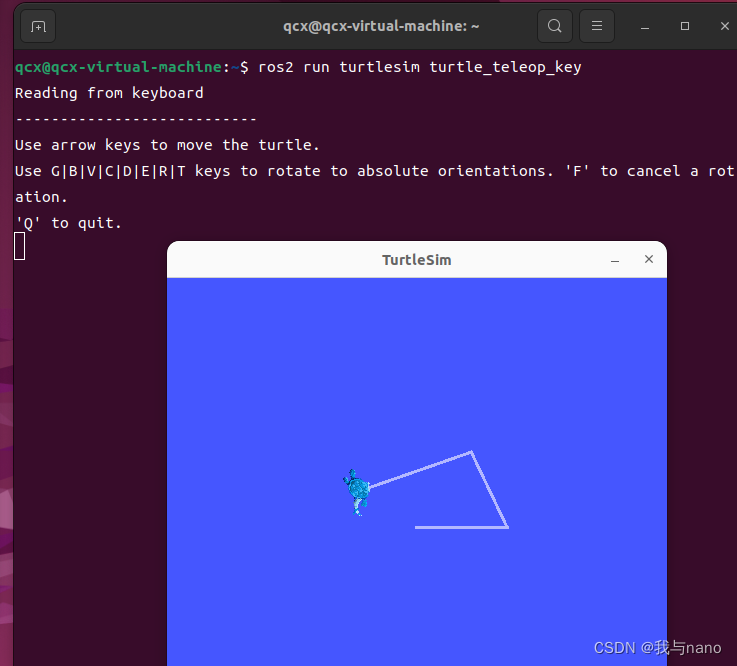
Ros2 - first acquaintance with ros2 (I)