当前位置:网站首页>ESP8266通过Arduino IDE连接Onenet云平台(MQTT)
ESP8266通过Arduino IDE连接Onenet云平台(MQTT)
2022-07-06 09:16:00 【一入极客深似海】
const char *Device_ID = "876783185"; //设备ID
const char *Product_ID = "485561"; //产品ID
const char *Api_KEY = "123456"; //鉴权信息
const char *WiFi_SSID = "zongshutao"; //WiFi名称
const char *WiFi_Password = "18853783842"; //WiFi密码
#include <ESP8266WiFi.h>
#include <PubSubClient.h>
#include <SoftwareSerial.h>
SoftwareSerial GpsSerial(D7, D8); //rx,tx
struct
{
char GPS_Buffer[80];
bool isGetData; //是否获取到GPS数据
bool isParseData; //是否解析完成
char UTCTime[11]; //UTC时间
char latitude[11]; //纬度
char N_S[2]; //N/S
char longitude[12]; //经度
char E_W[2]; //E/W
bool isUsefull; //定位信息是否有效
String lat = ""; //纬度
String lon = ""; //经度
} Save_Data;
const unsigned int gpsRxBufferLength = 600;
char gpsRxBuffer[gpsRxBufferLength];
unsigned int ii = 0;
int L = D4; //LED指示灯引脚
float Current = 0;
uint8_t Upload_Package[200];
uint32_t Last_Updata_Time = 0;
WiFiClient espClient;
PubSubClient client(espClient);
void WiFi_Init(void); //wifi连接
void MQTT_Init(void); //MQTT初始化
void MQTT_Reconnection(void); //MQTT重联函数
void MQTT_Callback(char *MQTT_Topic, uint8_t *MQTT_Payload, uint16_t MQTT_Payload_Len); //MQTT回调函数
void setup()
{
Serial.begin(9600);
WiFi_Init(); //wifi连接
MQTT_Init(); //MQTT初始化
GpsSerial.begin(9600); //定义波特率9600,和我们店铺的GPS模块输出的波特率一致
Serial.begin(9600);
Serial.println("Wating...");
Save_Data.isGetData = false;
Save_Data.isParseData = false;
Save_Data.isUsefull = false;
}
void loop()
{
gpsRead(); //获取GPS数据
parseGpsBuffer();//解析GPS数据
//printGpsBuffer();//输出解析后的数据
if (!client.connected()) //如果和服务器断开连接,则启动QMTT重新连接
MQTT_Reconnection();
if (millis() - Last_Updata_Time >= 3000) //每3秒扫描一次
{
Last_Updata_Time = millis();
float ADC_Value = random(1000); ;
Current = (ADC_Value) * 0.033783784; //存储计算后的浮点值
Serial.print("Current: "); //打印计算后的浮点值
Serial.print(Current);
Serial.println(" A\r\n");
memset(Upload_Package, 0, 200); //复制字符0到参数Upload_Package所指向的字符串的前100个字符。目的为清空Upload_Package数组
String Json_Buffer = ",;Current,";
Json_Buffer += String(Current);
Json_Buffer += ";";
Json_Buffer += "GPS,";
Json_Buffer += "112.023456";
Json_Buffer += "b";
Json_Buffer += "36.083456";
Json_Buffer += "c1";
Json_Buffer += ";";
Upload_Package[0] = 5;
Upload_Package[1] = highByte(Json_Buffer.length());
Upload_Package[2] = lowByte(Json_Buffer.length());
for (int i = 0; i < Json_Buffer.length(); i++)
Upload_Package[i + 3] = Json_Buffer.c_str()[i];
client.publish("$dp", Upload_Package, Json_Buffer.length() + 3);
}
client.loop();
}
void WiFi_Init(void)
{
Serial.print("\r\n\r\n正在连接到");
Serial.print(WiFi_SSID);
WiFi.mode(WIFI_STA);
WiFi.begin(WiFi_SSID, WiFi_Password);
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(".");
}
Serial.print("\r\n已连接WiFi。\r\n IP地址:");
Serial.println(WiFi.localIP());
}
void MQTT_Init(void)
{
client.setServer("183.230.40.39", 6002);
client.setCallback(MQTT_Callback);
}
void MQTT_Callback(char *MQTT_Topic, uint8_t *MQTT_Payload, uint16_t MQTT_Payload_Len)
{
Serial.printf("Topic: %s[%d]:\r\n", MQTT_Topic, MQTT_Payload_Len);
//Serial.print(MQTT_Payload[i]);
for (uint16_t i = 0; i < MQTT_Payload_Len; i++)
{
//Serial.print(MQTT_Payload[i] < 0x10 ? " 0x0" : " 0x");
Serial.print(MQTT_Payload[i]);
}
Serial.println();
}
void MQTT_Reconnection(void)
{
while (!client.connected())
{
Serial.println("MQTT重联。");
if (client.connect(Device_ID, Product_ID, Api_KEY))
Serial.println("MQTT已连接");
else
{
Serial.print("连接失败,错误代码为=");
Serial.print(client.state());
Serial.println(",请在5秒钟后重试。");
delay(5000);
}
}
}
void errorLog(int num)
{
Serial.print("错误");
Serial.println(num);
while (1)
{
digitalWrite(L, HIGH);
delay(300);
digitalWrite(L, LOW);
delay(300);
}
}
void printGpsBuffer() {
if (Save_Data.isParseData)
{
Save_Data.isParseData = false;
Serial.print("Save_Data.UTCTime = ");
Serial.println(Save_Data.UTCTime);
if (Save_Data.isUsefull)
{
Save_Data.isUsefull = false;
Serial.print("Save_Data.latitude = ");
Serial.println(Save_Data.lat);
Serial.print("Save_Data.N_S = ");
Serial.println(Save_Data.N_S);
Serial.print("Save_Data.longitude = ");
Serial.println(Save_Data.lon);
Serial.print("Save_Data.E_W = ");
Serial.println(Save_Data.E_W);
}
else
{
Serial.println("GPS数据没有用!");
}
}
}
void parseGpsBuffer() {
//解析GPS数据
char *subString;
char *subStringNext;
if (Save_Data.isGetData)
{
Save_Data.isGetData = false;
Serial.println("**************");
Serial.println(Save_Data.GPS_Buffer);
for (int i = 0 ; i <= 6 ; i++)
{
if (i == 0)
{
if ((subString = strstr(Save_Data.GPS_Buffer, ",")) == NULL)
errorLog(1); //解析错误
}
else
{
subString++;
if ((subStringNext = strstr(subString, ",")) != NULL)
{
char usefullBuffer[2];
switch (i)
{
case 1: memcpy(Save_Data.UTCTime, subString, subStringNext - subString); break; //获取UTC时间
case 2: memcpy(usefullBuffer, subString, subStringNext - subString); break; //获取UTC时间
case 3: memcpy(Save_Data.latitude, subString, subStringNext - subString); break; //获取纬度信息
case 4: memcpy(Save_Data.N_S, subString, subStringNext - subString); break; //获取N/S
case 5: memcpy(Save_Data.longitude, subString, subStringNext - subString); break; //获取纬度信息
case 6: memcpy(Save_Data.E_W, subString, subStringNext - subString); break; //获取E/W
default: break;
}
Save_Data.lat = Save_Data.latitude;
Save_Data.lon = Save_Data.longitude;
tempString(Save_Data.lat);
tempString(Save_Data.lon);
subString = subStringNext;
Save_Data.isParseData = true;
if (usefullBuffer[0] == 'A')
Save_Data.isUsefull = true;
else if (usefullBuffer[0] == 'V')
Save_Data.isUsefull = false;
}
else
{
errorLog(2); //解析错误
}
}
}
}
}
void gpsRead() {
while (GpsSerial.available())
{
gpsRxBuffer[ii++] = GpsSerial.read();
if (ii == gpsRxBufferLength)clrGpsRxBuffer();
}
char* GPS_BufferHead;
char* GPS_BufferTail;
if ((GPS_BufferHead = strstr(gpsRxBuffer, "$GPRMC,")) != NULL || (GPS_BufferHead = strstr(gpsRxBuffer, "$GNRMC,")) != NULL )
{
if (((GPS_BufferTail = strstr(GPS_BufferHead, "\r\n")) != NULL) && (GPS_BufferTail > GPS_BufferHead))
{
memcpy(Save_Data.GPS_Buffer, GPS_BufferHead, GPS_BufferTail - GPS_BufferHead);
Save_Data.isGetData = true;
clrGpsRxBuffer();
}
}
}
void clrGpsRxBuffer(void)
{
memset(gpsRxBuffer, 0, gpsRxBufferLength); //清空
ii = 0;
}
void tempString(String &nu) {
for (int i = 0; i < nu.length() - 1; i++) {
if (nu[i] == '.') {
char temp = nu[i - 1];
nu[i - 1] = nu[i];
nu[i] = temp;
temp = nu[i - 2];
nu[i - 2] = nu[i - 1];
nu[i - 1] = temp;
break;
}
}
}
边栏推荐
- ES6 let and const commands
- Codeforces Round #771 (Div. 2)
- [Blue Bridge Cup 2017 preliminary] buns make up
- Pytoch Foundation
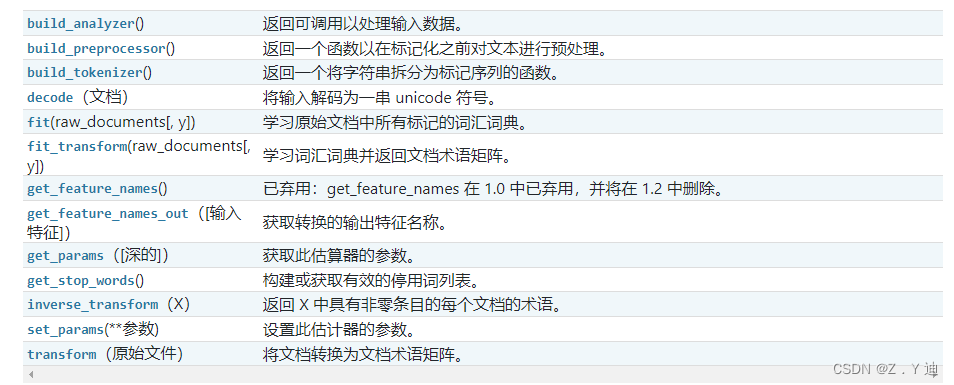
- sklearn之feature_extraction.text.CountVectorizer / TfidVectorizer
- Vs2019 use wizard to generate an MFC Application
- Gallery之图片浏览、组件学习
- Mtcnn face detection
- TypeScript
- L2-001 emergency rescue (25 points)
猜你喜欢

随机推荐
5G工作原理详解(解释&图解)
FreeRTOS 任务函数里面的死循环
Matlab learning and actual combat notes
互聯網協議詳解
树莓派 轻触开关 按键使用
[mrctf2020] dolls
Password free login of distributed nodes
MATLAB学习和实战 随手记
Using LinkedHashMap to realize the caching of an LRU algorithm
FTP file upload file implementation, regularly scan folders to upload files in the specified format to the server, C language to realize FTP file upload details and code case implementation
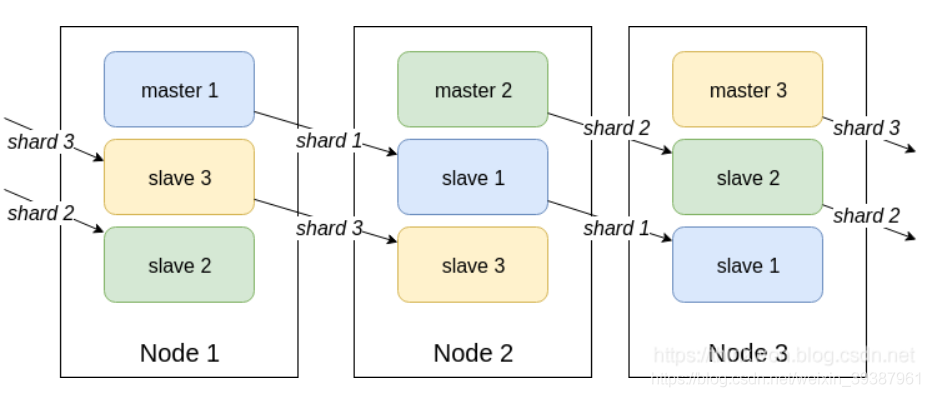
Principle and implementation of MySQL master-slave replication
优先级反转与死锁
uCOS-III 的特点、任务状态、启动
Hutool中那些常用的工具类和方法
Some concepts often asked in database interview
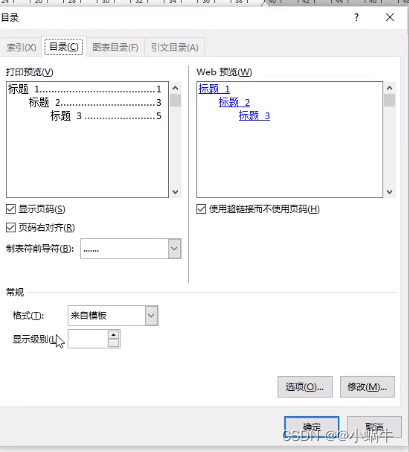
Word typesetting (subtotal)
Composition des mots (sous - total)
Dependency in dependencymanagement cannot be downloaded and red is reported
[NPUCTF2020]ReadlezPHP
选择法排序与冒泡法排序【C语言】