当前位置:网站首页>[GNSS data processing] Helmert variance component estimation analysis and code implementation
[GNSS data processing] Helmert variance component estimation analysis and code implementation
2022-07-06 12:53:00 【Proletarians】
One 、 background
helmert Variance component estimation is variance - A special case of covariance component estimation , In modern surveying adjustment , There are obvious changes in the data we process , The data sequence includes gross errors , The data type is no longer single . When we encounter two or more types of data , Consider using Helmert variance component estimation , The premise of application is that different types of data need to be independent , So our weight matrix is diagonal matrix .
Two 、 introduce
Let's first introduce the game of King glory , The king is a sharp weapon for flirting with his sister , ha-ha , It's like you have two mobile phones ( Android and apple ), When I take my sister, I probably use apples , Because Apple is better than Android in terms of game experience , Don't drop the frame when taking a sister , No, carton , Don't back off , To operate, there are operations , There is skin, there is skin , This is to give apple a high evaluation , In other words , Give Apple more weight , This is a priori .
that , In the field of Surveying and Mapping , When we measure ( Although I am surveying and mapping , But I am a thief in traditional surveying and mapping ), When measuring the corner of triangulation , There are two types of data ; stay gnss in , When processing multimode data , for example gps and bds There are also two types of data .
3、 ... and 、matlab Code implementation
Data use 《 Generalized survey adjustment 》( The second edition )P106 Example , I use matlab The code implements a wave .
I believe it is the people who have read the theory , Briefly summarize the data processing process :
(1) A priori weighted adjustment ,
(2) Variance component estimation ,
(3) Then reset the weight adjustment ,
(4) When the processed unit weight variance is equal to or less than the threshold .
The formula is not posted , Just post the code
close all
clear all
clc
% function :helmert Variance component estimation
% step1: According to the error equation (v=Bx-l) Determine the constant matrix
% Angle measurement coefficient matrix B1 12*4
B1=[0.5532 -0.8100 0 0;0.2434 0.5528 0 0;-0.7966 0.2572 0 0;-0.2434 -0.5528 0 0;
0.6298 0.6368 0 0;-0.3864 -0.0840 0 0;0.7966 -0.2572 -0.2244 -0.3379;-0.8350 -0.1523 0.0384 0.4095;
0.0384 0.4095 0.1860 -0.0716;-0.0384 -0.4095 0.2998 0.1901;-0.3480 0.3255 -0.0384 -0.4095;0.3864 0.0840 -0.2614 0.2194];
% Edge coefficient matrix B2 6*4
B2=[0.3072 0.9516 0 0;-0.9152 0.4030 0 0;0.2124 -0.9722 0 0;
0 0 -0.6429 -0.7660;0 0 -0.8330 0.5532;0.9956 -0.0934 -0.9956 0.0934];
% coefficient matrix B 18*4
B=[B1;B2];
% Angle measurement constant term l1 12*1
l1=[0.18 -0.53 3.15 0.23 -2.44 1.01 2.68 -4.58 2.80 -3.10 8.04 -1.14]';
l1=-l1;
% Boundary constant term l2 6*1
l2=[ -0.84 1.54 -3.93 2.15 -12.58 -8.21]';
l2=-l2;
% Constant term l 18*1
l=[l1;l2];
% Measure the number of angles and sides
n1=12;
n2=6;
% step2: Classify according to the source of observations , Fixed right
cnt=0;
% Initial weighting , Mean square error of angle measurement =1.5 Mean square error of side measurement =2.0, Save the angle measurement and side measurement variance
sita=[1.5*1.5 2.0*2.0];
while(1)
% Fixed right , Get the power matrix
sita1=sita(1)/sita(1);
sita2=sita(1)/sita(2);
% sita1=1;
% sita2=0.56;
P1=diag(sita1*ones(1,12));
P2=diag(sita2*ones(1,6));
P=diag([sita1*ones(1,12) sita2*ones(1,6)]);
% seek N
N=B'*P*B;
N1=B1'*P1*B1;
N2=B2'*P2*B2;
% seek W
W=B'*P*l;
W1=B1'*P1*l1;
W2=B2'*P2*l2;
% Adjustment
x=inv(N)*W;
v1=B1*x-l1;
v2=B2*x-l2;
% according to hermet The estimation formula determines the matrix
w1=v1'*P1*v1;
w2=v2'*P2*v2;
w=[w1 w2]';
S=[n1-2*trace(inv(N)*N1)+trace(inv(N)*N1*inv(N)*N1) trace(inv(N)*N1*inv(N)*N2);
trace(inv(N)*N1*inv(N)*N2) n2-2*trace(inv(N)*N2)+trace(inv(N)*N2*inv(N)*N2)];
sita=inv(S)*w;% Redefining
cnt=cnt+1;% Used for statistics helmert Number of executions
disp(['【0】helmet Number of times ',num2str(cnt),' 【1】 Unit weight variance of angle measurement and side measurement ',num2str(sita(1)),' ',num2str(sita(2)),'',' 【2】 Ratio of unit weight variance 1:',num2str(sita(2)/sita(1))]);
if(abs(1-min(sita)/max(sita))<0.01)
break;
else
% Angle measurement variance and side measurement variance
sita(1)=sita(1)*inv(sita1);
sita(2)=sita(2)*inv(sita2);
end
end
disp('finish');
Code comments all have , The process is also written , Then put the results I printed 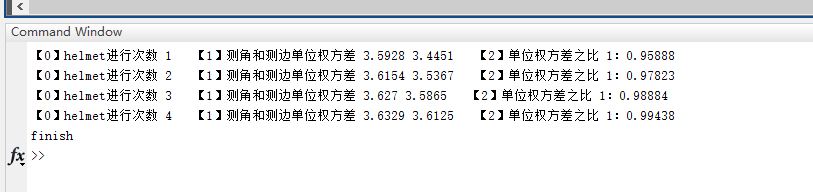
The example in the book is iteration 3 Time out , My is 4 Time . My right does not take two decimal places , Even if you take the last two , You will find in the book N Erroneous , Ha ha ha !
边栏推荐
猜你喜欢
基本Dos命令
Programming homework: educational administration management system (C language)
![[algorithm] sword finger offer2 golang interview question 1: integer division](/img/e6/f17135207b3540ec58e5a9eed54220.png)
[algorithm] sword finger offer2 golang interview question 1: integer division
![[algorithm] sword finger offer2 golang interview question 3: the number of 1 in the binary form of the first n numbers](/img/64/0f352232359c7d44f12b20a64c7bb4.png)
[algorithm] sword finger offer2 golang interview question 3: the number of 1 in the binary form of the first n numbers
341. Flatten nested list iterator
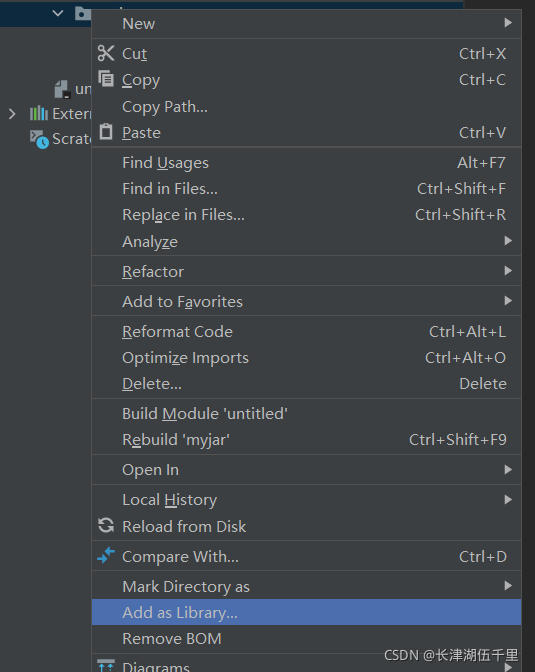
idea中导包方法
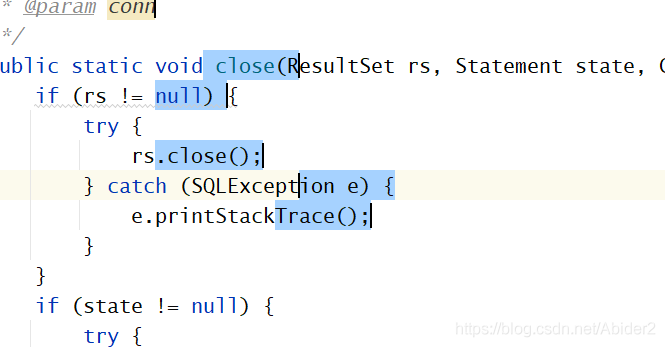
Easy to use shortcut keys in idea
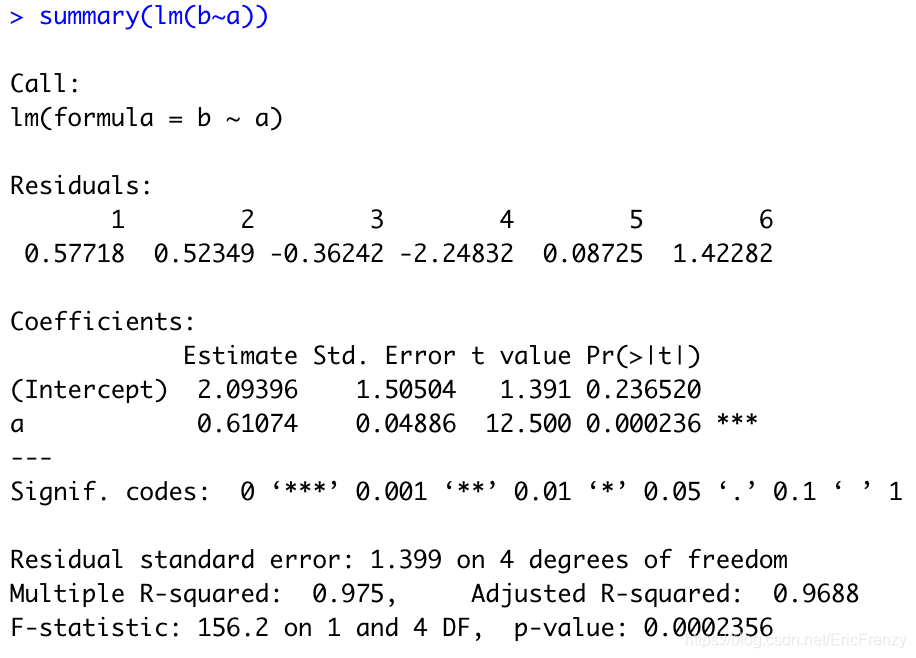
(4) Data visualization of R language -- matrix chart, histogram, pie chart, scatter chart, linear regression and strip chart
What are the advantages of using SQL in Excel VBA
Unity3d makes the registration login interface and realizes the scene jump
随机推荐
isEmpty 和 isBlank 的用法区别
服务未正常关闭导致端口被占用
Knowledge system of digital IT practitioners | software development methods -- agile
[algorithm] sword finger offer2 golang interview question 12: the sum of the left and right sub arrays is equal
Lock wait timeout exceeded try restarting transaction
Special palindromes of daily practice of Blue Bridge Cup
341. Flatten nested list iterator
Mysql database index
idea中好用的快捷键
编辑距离(多源BFS)
[algorithm] sword finger offer2 golang interview question 9: subarray with product less than k
[算法] 剑指offer2 golang 面试题3:前n个数字二进制形式中1的个数
It has been solved by personal practice: MySQL row size too large (> 8126) Changing some columns to TEXT or BLOB or using ROW_ FORMAT
【无标题】
Theoretical derivation of support vector machine
Programming homework: educational administration management system (C language)
平衡二叉树详解 通俗易懂
[algorithm] sword finger offer2 golang interview question 10: subarray with sum K
[899] ordered queue
[算法] 剑指offer2 golang 面试题7:数组中和为0的3个数字