当前位置:网站首页>Installation of gazebo & connection with ROS
Installation of gazebo & connection with ROS
2022-07-07 01:16:00 【Serinus】
One 、 install
1. Add source
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'

2. add to key
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
3. install Gazebo
sudo apt-get update
sudo apt-get install gazebo9
sudo apt-get install libgazebo9-dev
The following error occurred , Then re-enter the command sudo apt-get install gazebo9, Until the download is successful ( There may be multiple errors ).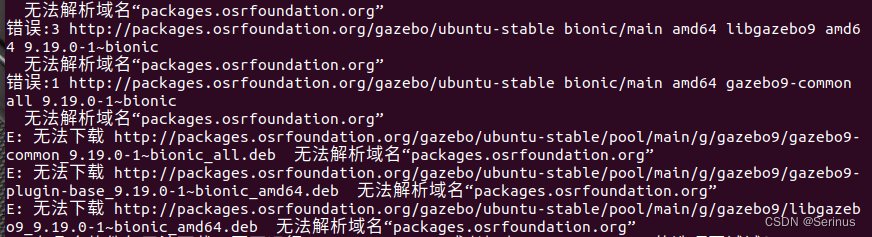
4. open Gazebo
# Enter the command
gazebo
If the following interface appears, the installation is successful .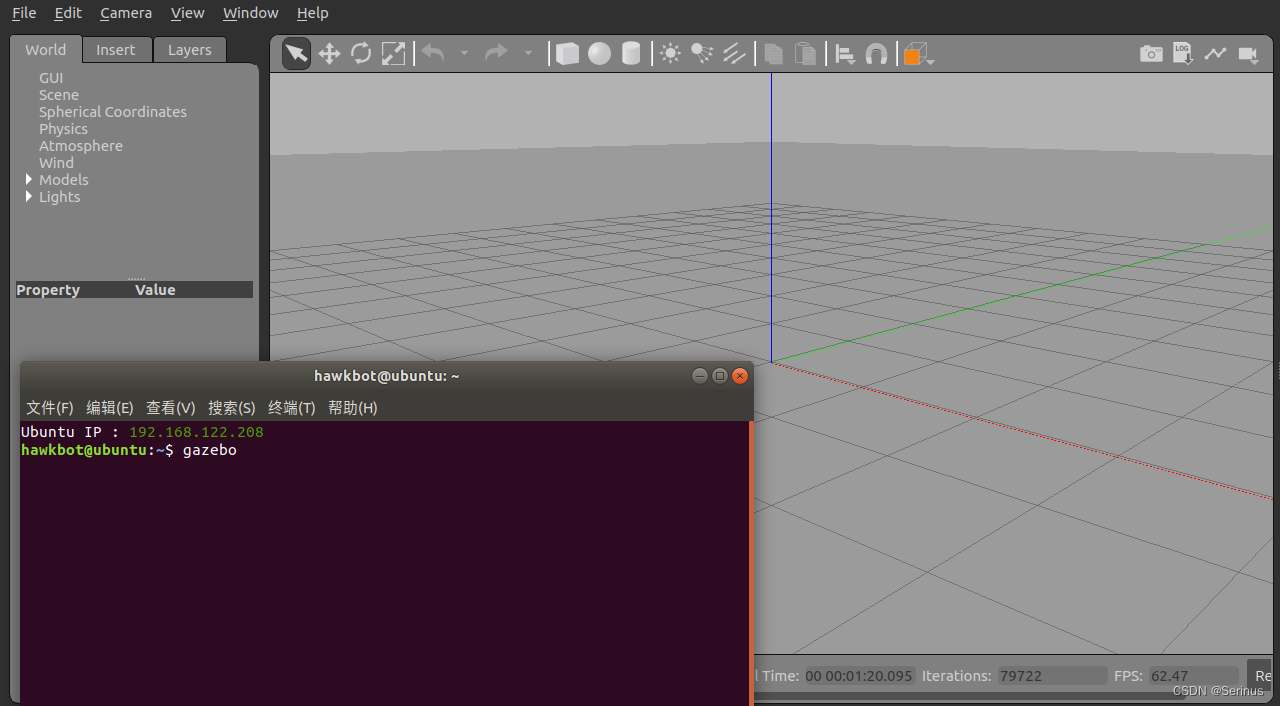
If an error :
VMware: vmw_ioctl_command error Invalid parameter .
Enter the following command :
echo "export SVGA_VGPU10=0" >> ~/.bashrc
Then restart the virtual machine .
Two 、 And ROS Connect
1. install ROS-Gazebo Interface
sudo apt install ros-melodic-gazebo-ros-pkgs ros-melodic-gazebo-msgs ros-melodic-gazebo-plugins ros-melodic-gazebo-ros-control
2. Terminal input command
roscore
# Open a new terminal
rosrun gazebo_ros gazebo
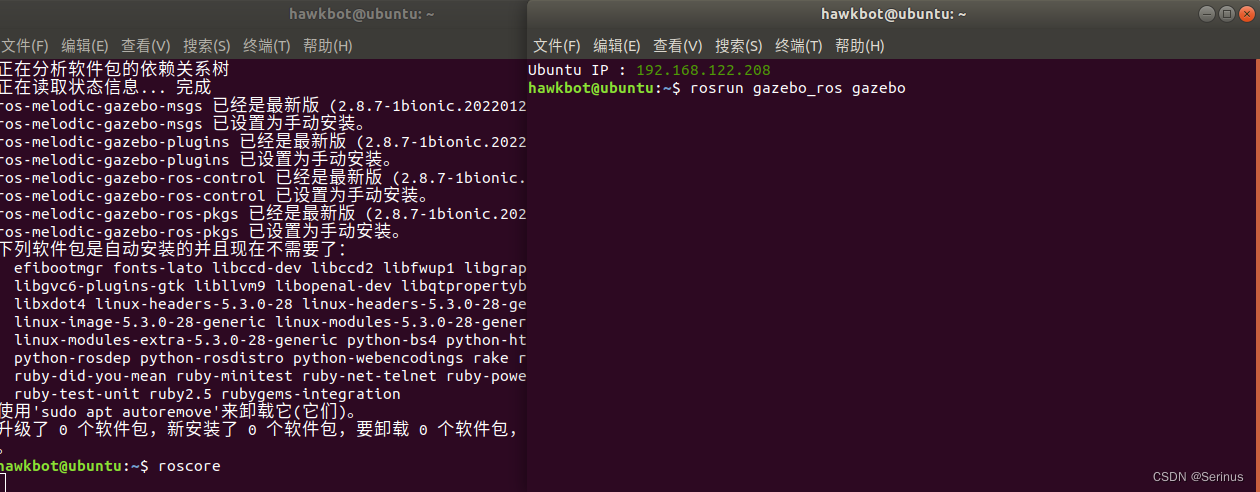
The following interface will explain and ROS Successful connection .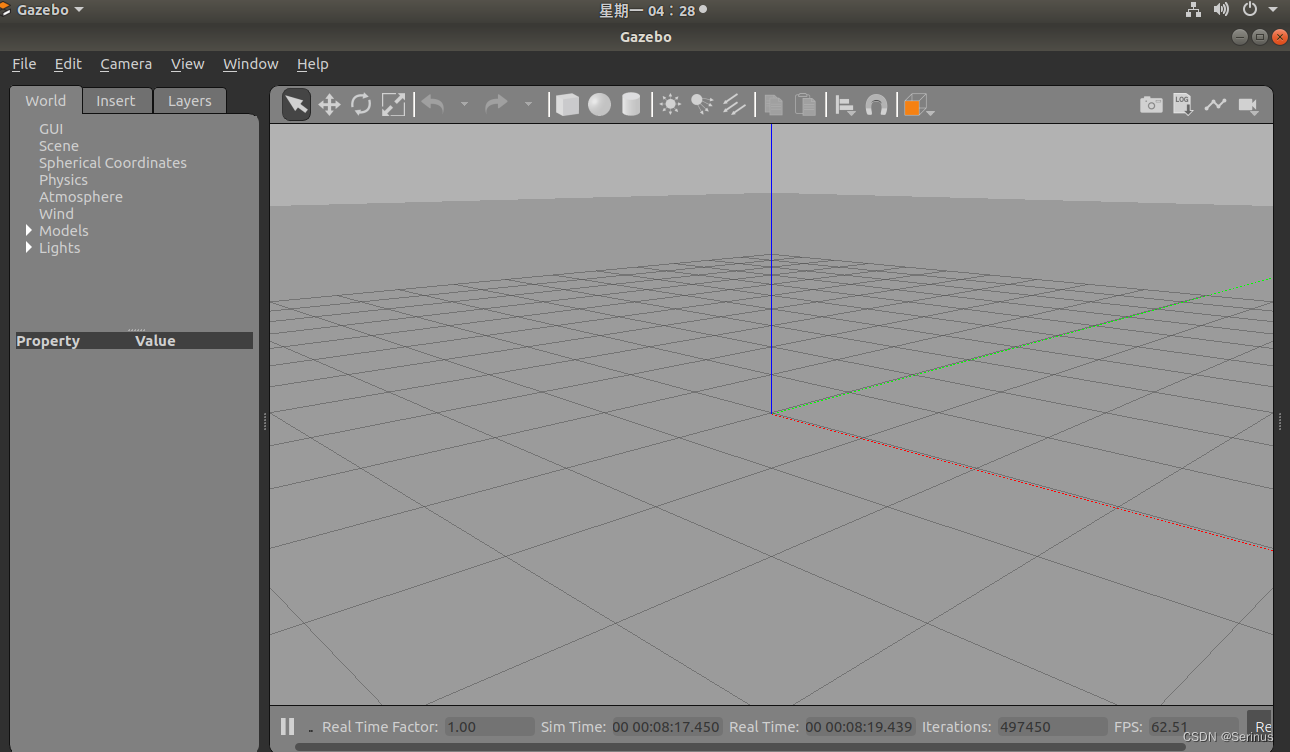
conversely , Then enter the following command :
cd ~/.gazebo/
mkdir -p models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvf
killall gzserver
killall gzclient
Then type :
roscore
# Open a new terminal
rosrun gazebo_ros gazebo
appear Gazebo Open the interface and the connection succeeds .
边栏推荐
- BFS realizes breadth first traversal of adjacency matrix (with examples)
- Boot - Prometheus push gateway use
- Installation and testing of pyflink
- UI控件Telerik UI for WinForms新主题——VS2022启发式主题
- mysql: error while loading shared libraries: libtinfo. so. 5: cannot open shared object file: No such
- Installation of torch and torch vision in pytorch
- Supersocket 1.6 creates a simple socket server with message length in the header
- Part VI, STM32 pulse width modulation (PWM) programming
- 筑梦数字时代,城链科技战略峰会西安站顺利落幕
- NEON优化:性能优化经验总结
猜你喜欢
Let's see through the network i/o model from beginning to end
字节P7专业级讲解:接口测试常用工具及测试方法,福利文
【JVM调优实战100例】05——方法区调优实战(下)
![[HFCTF2020]BabyUpload session解析引擎](/img/db/6003129bc16f943ad9868561a2d5dc.png)
[HFCTF2020]BabyUpload session解析引擎

重上吹麻滩——段芝堂创始人翟立冬游记
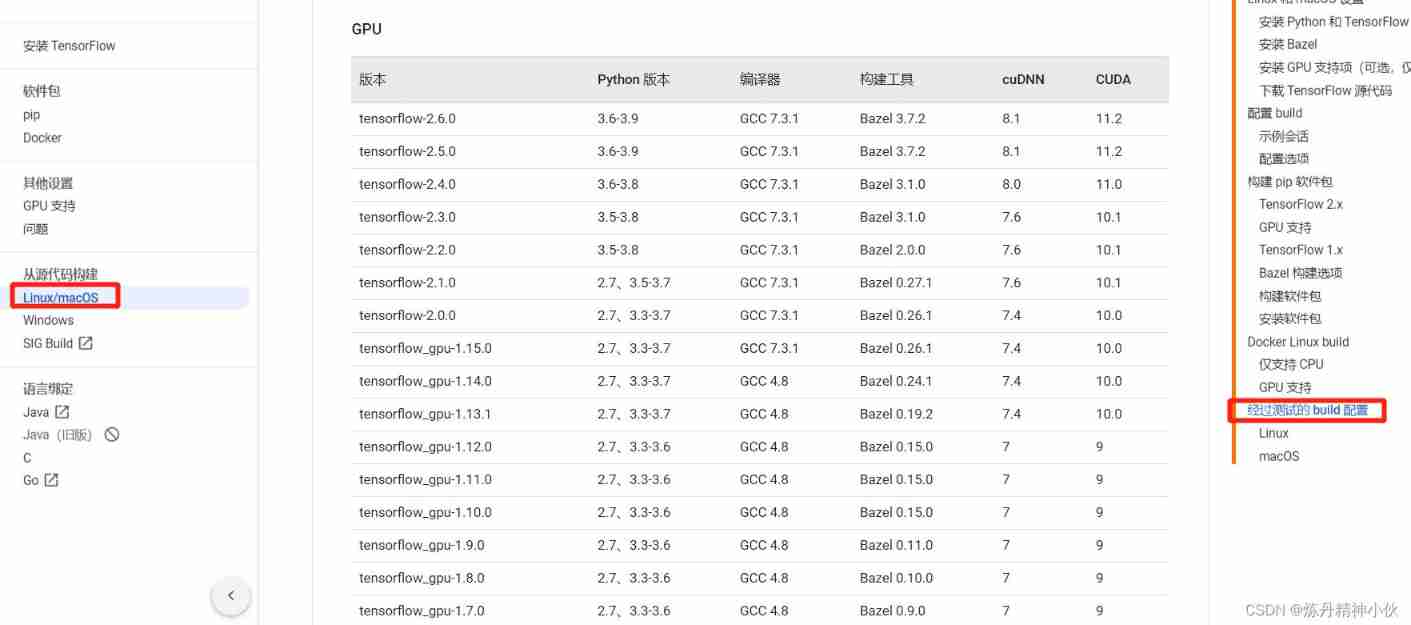
Tensorflow GPU installation
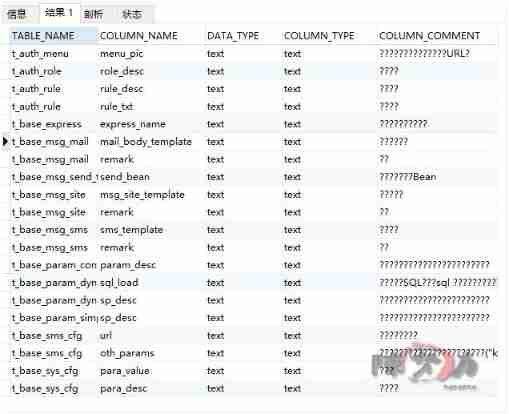
MySQL script batch queries all tables containing specified field types in the database
![[batch dos-cmd command - summary and summary] - string search, search, and filter commands (find, findstr), and the difference and discrimination between find and findstr](/img/4a/0dcc28f76ce99982f930c21d0d76c3.png)
[batch dos-cmd command - summary and summary] - string search, search, and filter commands (find, findstr), and the difference and discrimination between find and findstr
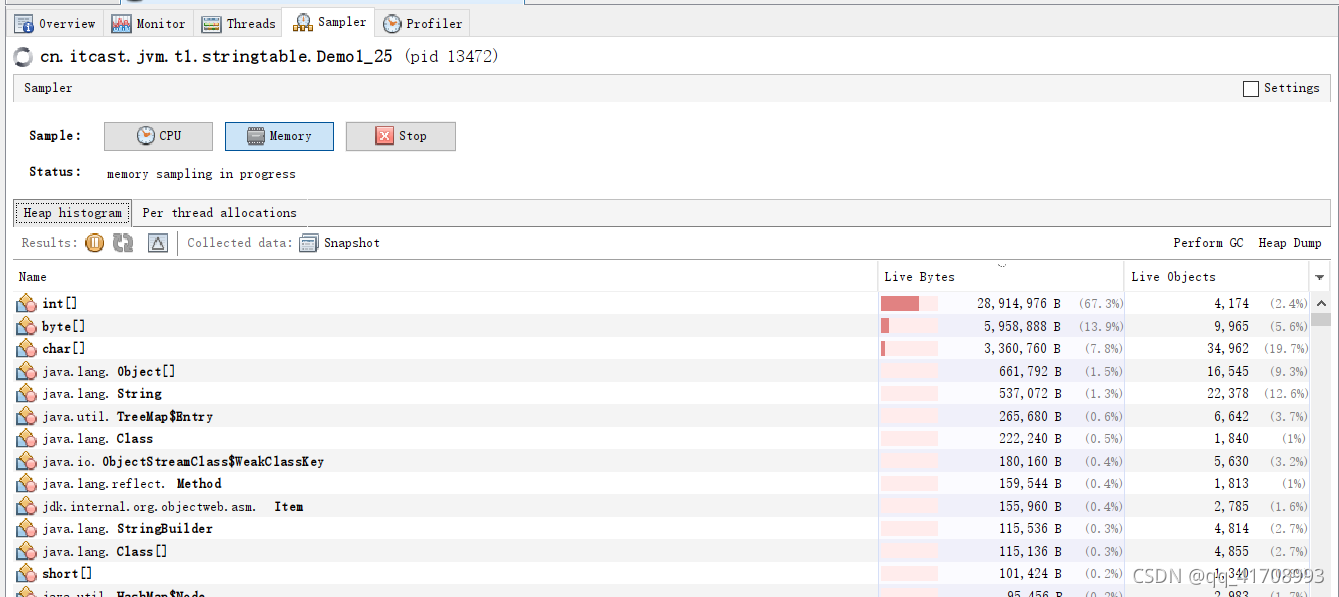
【JVM调优实战100例】04——方法区调优实战(上)

Part V: STM32 system timer and general timer programming
随机推荐
力扣1037. 有效的回旋镖
[牛客] B-完全平方数
Oracle: Practice of CDB restricting PDB resources
城联优品入股浩柏国际进军国际资本市场,已完成第一步
Telerik UI 2022 R2 SP1 Retail-Not Crack
第五篇,STM32系统定时器和通用定时器编程
Installation and testing of pyflink
Part IV: STM32 interrupt control programming
Boot - Prometheus push gateway use
BFS realizes breadth first traversal of adjacency matrix (with examples)
The difference between spin and sleep
Do you understand this patch of the interface control devaxpress WinForms skin editor?
golang中的Mutex原理解析
字节P7专业级讲解:接口测试常用工具及测试方法,福利文
mysql: error while loading shared libraries: libtinfo. so. 5: cannot open shared object file: No such
A brief history of deep learning (I)
[Niuke] [noip2015] jumping stone
Dell筆記本周期性閃屏故障
Make a simple graphical interface with Tkinter
go-zero微服务实战系列(九、极致优化秒杀性能)