当前位置:网站首页>Summary of open3d environment errors
Summary of open3d environment errors
2022-07-02 07:53:00 【Silent clouds】
Windows install open3d
usually pip install open3d, However, in fact, this installation will report an error . Even in Prompt The installation is the same . See the following for error conditions , Now is the normal installation step , A total of two need to be installed , One is open3d, The other is open3d-python
#pip install
pip install open3d
pip install open3d-python
#conda install
conda install open3d
conda install open3d-python
ERROR: Cannot uninstall ‘terminado’. It is a distutils installed project and…
Install... On the command line open3d I will probably encounter such a mistake , At this time, we need to add some materials , Change the installation command to :
#pip install
pip install --user open3d
#conda install
conda install -c open3d-admin open3d
AttributeError: ‘module’ object has no attribute ‘read_point_cloud’
This is running open3d Errors that will be reported from time to time . In addition, there is an error report :AttributeError: 'open3d.geometry.PointCloud()' object has no attribute 'voxel_down_sample'
This is the same kind of error reporting , Are caused by version problems .
Suggest : Unload and reload , Or update to the latest version . If it doesn't work, just use anaconda Create a virtual environment installation open3d and open3d-python.
import open3d Times wrong
What I met was numpy Errors caused by version problems , So just use pip install numpy==1.21 reinstall numpy that will do .
边栏推荐
- Faster-ILOD、maskrcnn_benchmark训练coco数据集及问题汇总
- 浅谈深度学习模型中的后门
- ABM thesis translation
- ModuleNotFoundError: No module named ‘pytest‘
- 【Mixed Pooling】《Mixed Pooling for Convolutional Neural Networks》
- What if the laptop can't search the wireless network signal
- Remplacer l'auto - attention par MLP
- Traditional target detection notes 1__ Viola Jones
- 【Paper Reading】
- Nacos service registration in the interface
猜你喜欢
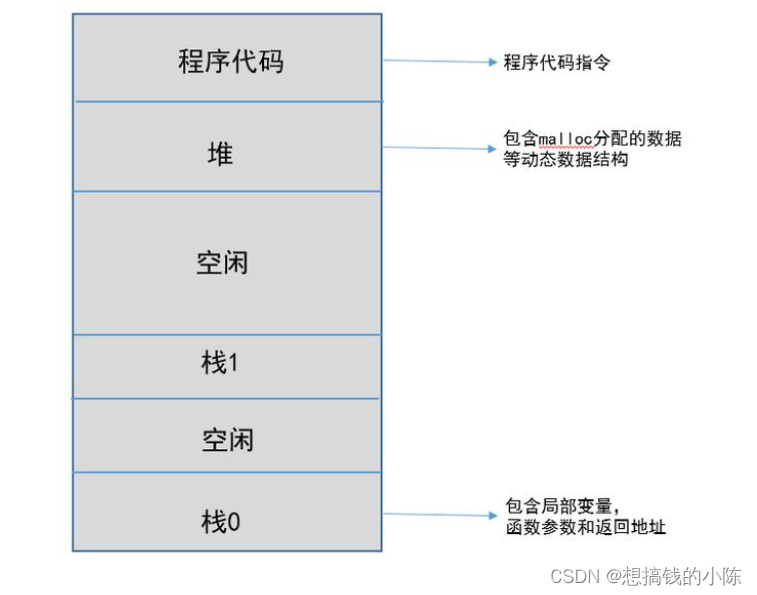
Memory model of program

Regular expressions in MySQL
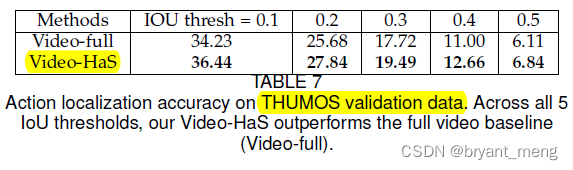
【Hide-and-Seek】《Hide-and-Seek: A Data Augmentation Technique for Weakly-Supervised Localization xxx》

Timeout docking video generation
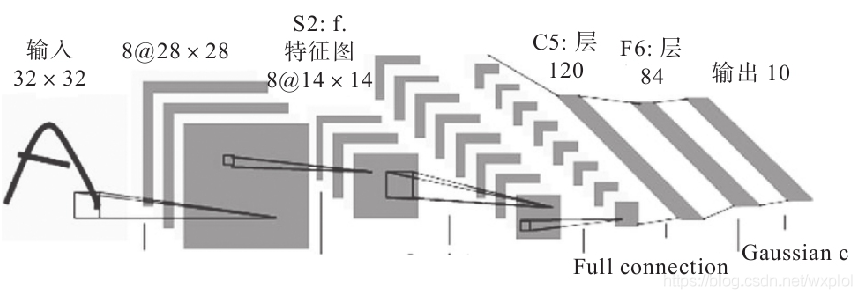
Common CNN network innovations
常见CNN网络创新点
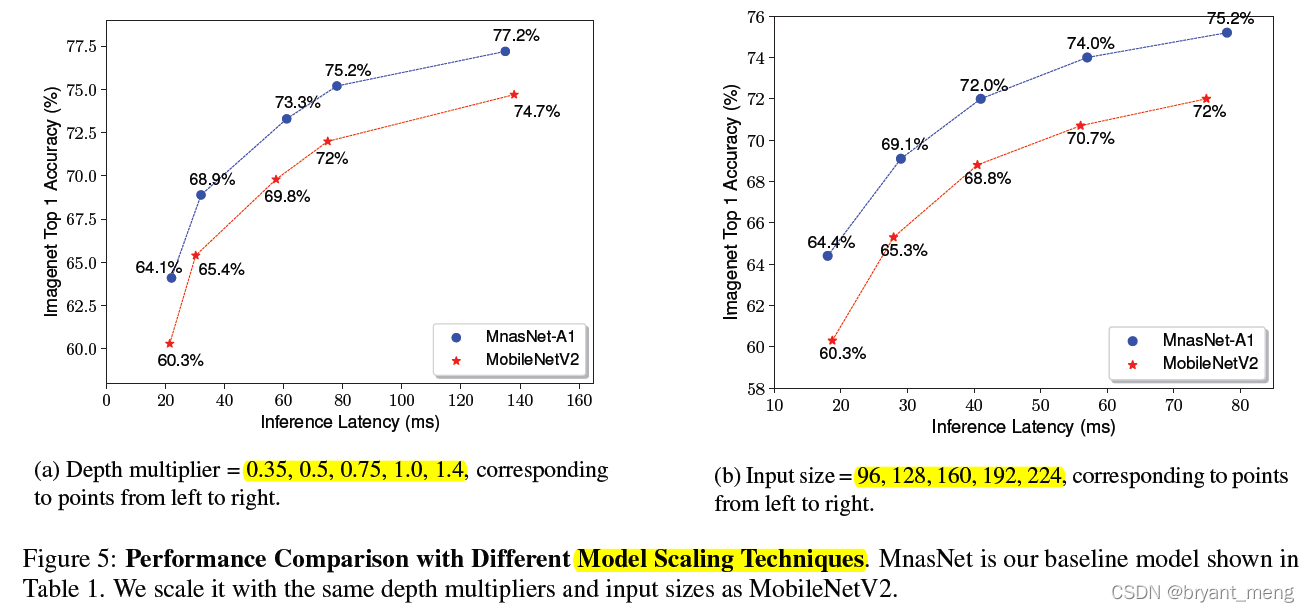
【MnasNet】《MnasNet:Platform-Aware Neural Architecture Search for Mobile》

Faster-ILOD、maskrcnn_benchmark训练coco数据集及问题汇总

【DIoU】《Distance-IoU Loss:Faster and Better Learning for Bounding Box Regression》

【学习笔记】Matlab自编高斯平滑器+Sobel算子求导
随机推荐
Sorting out dialectics of nature
论文写作tip2
【Batch】learning notes
[CVPR‘22 Oral2] TAN: Temporal Alignment Networks for Long-term Video
Implementation of yolov5 single image detection based on onnxruntime
PointNet原理证明与理解
Semi supervised mixpatch
The hystrix dashboard reported an error hystrix Stream is not in the allowed list of proxy host names solution
Handwritten call, apply, bind
open3d学习笔记五【RGBD融合】
Mmdetection trains its own data set -- export coco format of cvat annotation file and related operations
【MnasNet】《MnasNet:Platform-Aware Neural Architecture Search for Mobile》
win10+vs2017+denseflow编译
浅谈深度学习模型中的后门
One book 1078: sum of fractional sequences
Embedding malware into neural networks
Network metering - transport layer
[binocular vision] binocular correction
[in depth learning series (8)]: principles of transform and actual combat
Daily practice (19): print binary tree from top to bottom