当前位置:网站首页>Carla-UE4Editor导入RoadRunner地图文件(保姆级教程)
Carla-UE4Editor导入RoadRunner地图文件(保姆级教程)
2022-07-02 06:28:00 【江藤霞】
UE4Editor导入RoadRunner地图文件
目录
一、开发环境说明
1、Carla:0.9.11
2、Python:3.7.8
3、操作系统:Windows10
4、VS 2019,SDK没有特殊限制
5、RoadRunner安装需要许可证,试用许可证30天,高校一般有免费的可以申请
二、RoadRunner导出地图文件
步骤一:导出
将新建的文件进行导出…
步骤二:命名和导出路径
本案例地图命名为:Parking_UG_05
点击Export!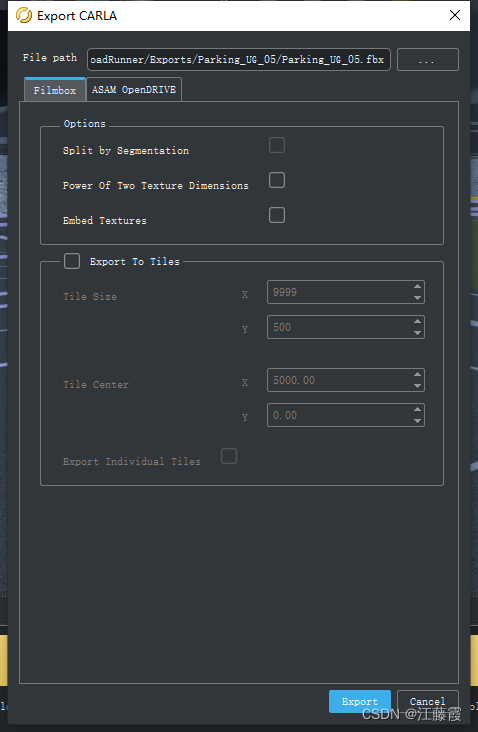
导出结果如下:
一般情况下只要没有`红色`的错误即可
注意:记住地图的命名以及导出路径,后面要用到!
三、UE4导入地图文件
1、复制及一些设置
将刚刚生成的Parking_UG_05文件夹整个复制并粘贴到Carla源码下的Import\Package07目录,本案例为:
F:\Carla\carla-0.9.11\Import\Package07
注意:Package07为我自己新建的一个目录,命名可随机(不要有中文)
在该目录下还有package.json文件,没有的话自己新建,其内容如下:
{
"maps": [
{
"name": "Parking_UG_05",
"source": "./Parking_UG_05/Parking_UG_05.fbx",
"use_carla_materials": true,
"xodr": "./Parking_UG_05/Parking_UG_05.xodr"
}
],
"props": [
]
}
大概结构为这样…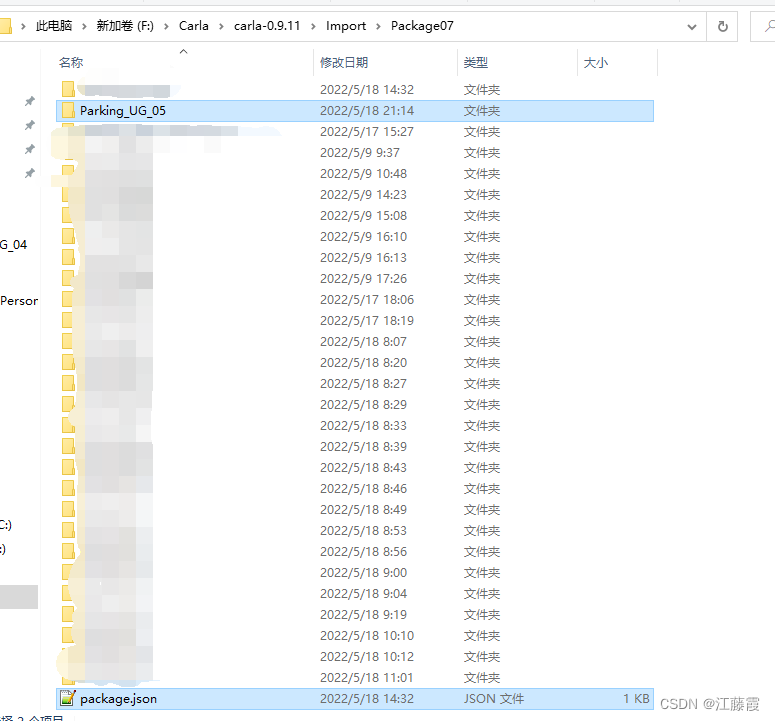
注意:name 参数值尽量与导出的地图文件名一致,不然可能导致莫名其妙的错误!(Parking_UG_05)。
2、生成命令
下面执行生成地图文件的命令
本案例Carla源码目录为:
F:\Carla\carla-0.9.11
打开自己安装的对应版本的 VS 2019 工具命令提示行。
进入到Carla源码目录,执行以下命令(Package07是我存放地图文件时新建的,记得灵活变更)
cd F:\Carla\carla-0.9.11
make import ARGS="--package Package07 --no-carla-materials"
等待PyCharm弹出Import工程后,点击运行按钮
等待程序运行完后会自动结束…
3、UE4Editor导入地图
- 打开
Carla的UE4工程(名称一般为:CarlaUE4.uproject)以启动UE4Editor - (该步骤可省略)在
Carla\Maps目录下新增Parking_UG_05文件夹并进入(如下所示)
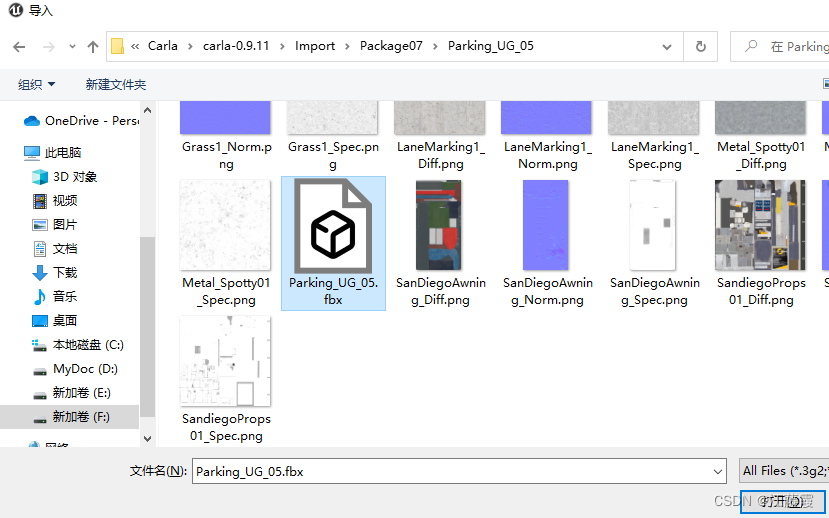
- 点击
导入,指定刚刚的Import目录(如下)下的地图文件,选中Parking_UG_05.fbx文件
F:\Carla\carla-0.9.11\Import\Package07\Parking_UG_05
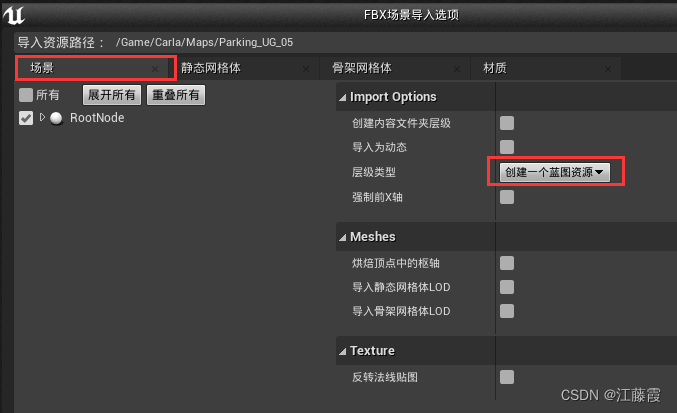
注意事项如下: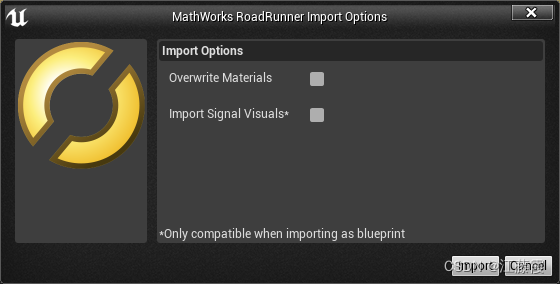

4、另存为
- 导入成功后会弹出一个界面,显示内容为你导入的3D地图,该页面不用管(保存或者不保存都行),直接切换到UE4Editor的主界面后操作如下:
文件 -》 将当前关卡另存为
- 选择地图关卡的保存路径和名称

完成!
边栏推荐
- 服务器的内网可以访问,外网却不能访问的问题
- open3d环境错误汇总
- 【Cascade FPD】《Deep Convolutional Network Cascade for Facial Point Detection》
- [learning notes] numerical differentiation of back error propagation
- 用于类别增量学习的动态可扩展表征 -- DER
- Go functions make, slice, append
- Eklavya -- infer the parameters of functions in binary files using neural network
- It's great to save 10000 pictures of girls
- 【BiSeNet】《BiSeNet:Bilateral Segmentation Network for Real-time Semantic Segmentation》
- 利用超球嵌入来增强对抗训练
猜你喜欢

【学习笔记】Matlab自编高斯平滑器+Sobel算子求导
![[learning notes] numerical differentiation of back error propagation](/img/1c/e28e31d7cc5ccc38607c7839ccc5f0.png)
[learning notes] numerical differentiation of back error propagation

樂理基礎(簡述)

静态库和动态库

STM32疑难杂症之ST-LINK Connection error INVALID ROM TABLE

Where do you find the materials for those articles that have read 10000?
![[learning notes] matlab self compiled image convolution function](/img/82/43fc8b2546867d89fe2d67881285e9.png)
[learning notes] matlab self compiled image convolution function

【雙目視覺】雙目矯正

It's great to save 10000 pictures of girls

联邦学习下的数据逆向攻击 -- GradInversion
随机推荐
【学习笔记】Matlab自编高斯平滑器+Sobel算子求导
Jupyter Notebook常用快捷键(在命令模式中按H也可查看)
open3d环境错误汇总
The hystrix dashboard reported an error hystrix Stream is not in the allowed list of proxy host names solution
Backup, recovery and repair of XFS file system
Summary of solving the Jetson nano installation onnx error (error: failed building wheel for onnx)
STM32疑难杂症之ST-LINK Connection error INVALID ROM TABLE
Prompt 范式简述
Meta Learning 简述
【双目视觉】双目立体匹配
用MLP代替掉Self-Attention
王-课外单词
Data reverse attack under federated learning -- gradinversion
JVM instructions
Fundamentals of music theory (brief introduction)
【FastDepth】《FastDepth:Fast Monocular Depth Estimation on Embedded Systems》
Graph Pooling 简析
C语言实现XML生成解析库(XML扩展)
On the back door of deep learning model
C#与MySQL数据库连接