当前位置:网站首页>针对语义分割的真实世界的对抗样本攻击
针对语义分割的真实世界的对抗样本攻击
2022-07-02 06:26:00 【MezereonXP】
针对语义分割的真实世界的对抗样本攻击
来自于论文"Evaluating the Robustness of Semantic Segmentation for Autonomous Driving against Real-World Adversarial Patch Attacks"
代码在[github](https://github. com/retis-ai/SemSegAdvPatch)有开源,各位感兴趣的可以自己去跑跑看。
文章的主要贡献:
- 提出了一种像素级别的交叉熵误差,用于生成强大的对抗补丁(adversarial patch)
- 使用3D世界的几何信息来构造对抗补丁
- 充分的实验,在Cityscape,CRALA和真实世界上进行测试
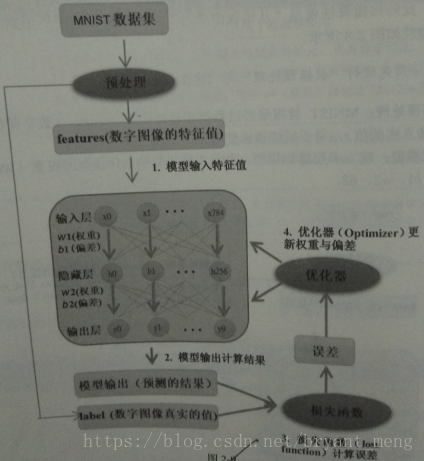
攻击概述
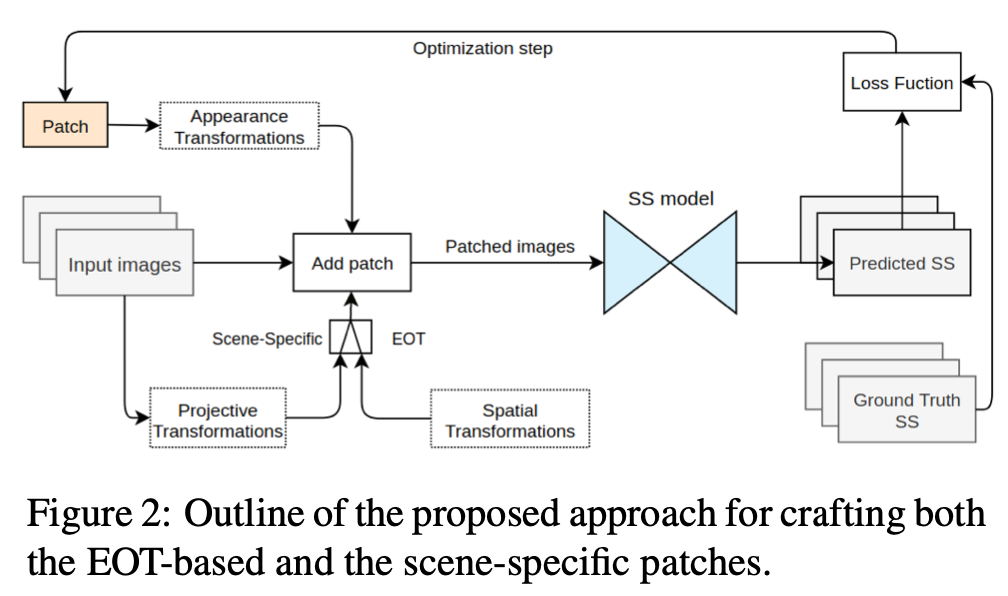
如上图所示的流程:
- 首先输入图片
- 图片会经过投影变换和空域变换,
- 然后传入到一个场景特定的EOT生成对应的补丁, EOT是指 Expectation Of Transformation
- EOT一般用来生成真实世界可用的对抗样本,使得对抗样本对真实世界的一些变换鲁棒
- 将打补丁之后的图片输入到SS模型之中,SS指Semantic Segmentation,也就是语义分割
- 得到语义分割的结果并优化对应的补丁
基于EOT的攻击
这里首先给出EOT攻击的形式化描述:
δ ∗ = arg max δ E x ∈ X , ζ a ∈ Γ a , η ∈ Γ L ( f ( x ~ ) , y ) \delta^* = \arg\max_{\delta}\mathbb{E}_{x\in\mathcal X, \zeta_a\in \Gamma_a,\eta\in \Gamma} \mathcal L(f(\tilde{x}), y) δ∗=argδmaxEx∈X,ζa∈Γa,η∈ΓL(f(x~),y)
其中 δ ∗ \delta^* δ∗ 代表最优的补丁, Γ \Gamma Γ 是空域变换的空间(包括平移、缩放等), Γ a \Gamma_a Γa 代表对实体的变换(包括明亮度、对比度、噪声等)
其中 x ~ = x + δ ∗ \tilde{x} = x + \delta^* x~=x+δ∗ 代表加上了最优补丁的输入
总的来说,EOT和普通对抗样本的区别其实在于,多了一些可能的变换,是的对抗样本具备更强的鲁棒性。
误差函数设计
有了EOT攻击的概述,我们只需要定义好误差函数,就可以对补丁进行梯度下降,进而搜索到好的对抗补丁了
这篇文章采用的是,较为简单的交叉熵误差,定义如下:
L C E ( p i , y i ) = − ∑ i y i log p i \mathcal L_{CE}(p_i, y_i) = -\sum_i y_i\log p_i LCE(pi,yi)=−i∑yilogpi
其中 y i ∈ { 0 , 1 } y_i\in\{0,1\} yi∈{ 0,1} 代表是否是正确类别, p i p_i pi 是指模型在 i i i 类别上的输出
对于语义分割而言,我可以把输出的每一个像素点位置当成是分类任务。
我们可以定义一个集合 P P P, 该集合包括除了补丁位置之外所有的像素位置,且这些像素位置被正确分类
P = { i ∈ N / N ~ ∣ S S i ( x ~ ) = y i } P = \{i\in \mathcal N /\ \tilde{\mathcal N} | SS_i(\tilde{x})=y_i\} P={ i∈N/ N~∣SSi(x~)=yi}
其中 N \mathcal N N 代表所有像素的位置, N ~ \tilde{\mathcal N} N~ 代表补丁覆盖的像素位置, x ~ \tilde{x} x~ 代表加了补丁的图像, S S i ( x ~ ) SS_i(\tilde{x}) SSi(x~) 代表对应输出的第 i i i 个像素的位置的输出。
那么逐个像素的交叉熵误差可以被分成两个部分:
L 1 = ∑ i ∈ P L C E ( f i ( x ~ ) , y i ) L 2 = ∑ i ∉ P L C E ( f i ( x ~ ) , y i ) \mathcal L_1 =\sum_{i\in P} \mathcal L_{CE}(f_i(\tilde{x}), y_i)\\ \mathcal L_2 = \sum_{i\notin P} \mathcal L_{CE}(f_i(\tilde{x}), y_i) L1=i∈P∑LCE(fi(x~),yi)L2=i∈/P∑LCE(fi(x~),yi)
这两个部分分别代表,补丁区域的输出误差以及补丁区域之外的输出误差
我们可以定义出一个融合误差,表示成他们的线性组合,进而计算出梯度:
∇ δ L ( f ( x ~ ) , y ) = γ ⋅ ∇ δ L 1 ∣ ∣ ∇ δ L 1 ∣ ∣ + ( 1 − γ ) ⋅ ∇ δ L 2 ∣ ∣ ∇ δ L 2 ∣ ∣ \nabla_\delta \mathcal L(f(\tilde{x}), y) = \gamma \cdot \frac{\nabla_{\delta}\mathcal L_1}{||\nabla_{\delta}\mathcal L_1||}+ (1-\gamma)\cdot\frac{\nabla_{\delta}\mathcal L_2}{||\nabla_{\delta}\mathcal L_2||} ∇δL(f(x~),y)=γ⋅∣∣∇δL1∣∣∇δL1+(1−γ)⋅∣∣∇δL2∣∣∇δL2
实验结果
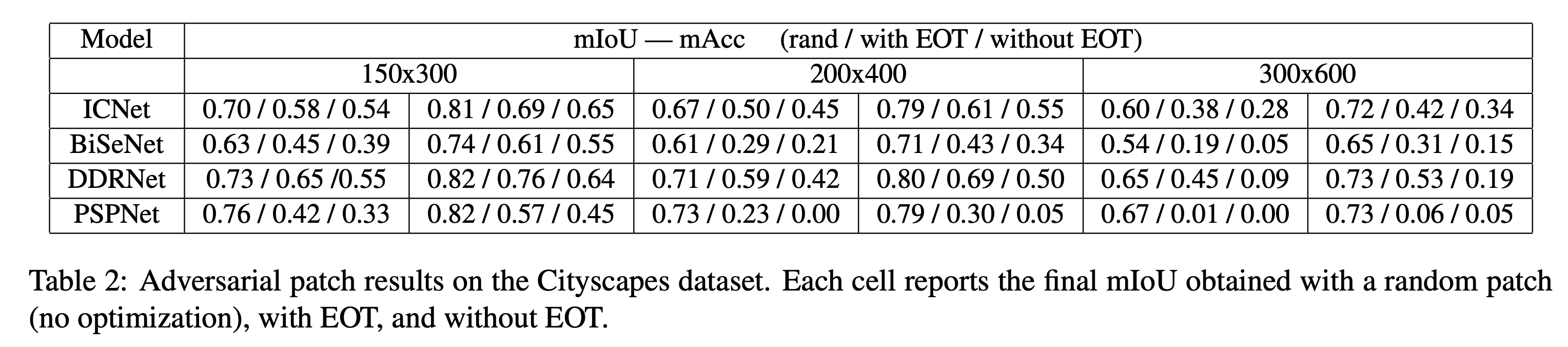
这里我们简单看一下在Cityscapes数据集上的实验结果,如上表所示。
Cityscapes是一个驾驶图像的数据集,其图片分辨率为1024x2048,其中2975张用于训练,500张用于测试。
表中的150x300,200x400,300x600是指补丁的大小。
rand/with EOT/without EOT 分别代表随机噪声,用EOT的对抗补丁,不用EOT的对抗补丁。
有几个容易得到的结论:
- 随着补丁范围的增加,正确率下降越明显
- EOT的效果要优于不加EOT的效果
- DDRNet的鲁棒性看上去是最佳的
边栏推荐
- C#与MySQL数据库连接
- Installation and use of image data crawling tool Image Downloader
- PointNet原理证明与理解
- [in depth learning series (8)]: principles of transform and actual combat
- 【Cutout】《Improved Regularization of Convolutional Neural Networks with Cutout》
- Faster-ILOD、maskrcnn_ Benchmark installation process and problems encountered
- latex公式正体和斜体
- 【Sparse-to-Dense】《Sparse-to-Dense:Depth Prediction from Sparse Depth Samples and a Single Image》
- 【Paper Reading】
- Hystrix dashboard cannot find hystrix Stream solution
猜你喜欢
【MnasNet】《MnasNet:Platform-Aware Neural Architecture Search for Mobile》
【MagNet】《Progressive Semantic Segmentation》

【AutoAugment】《AutoAugment:Learning Augmentation Policies from Data》
【Programming】

Implementation of yolov5 single image detection based on pytorch
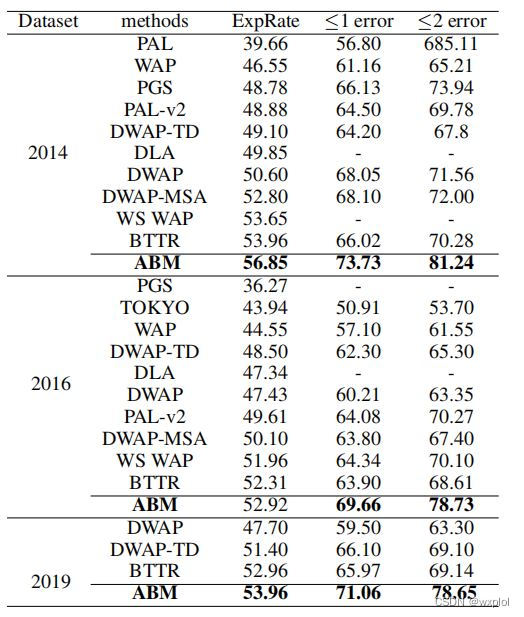
ABM thesis translation
【Wing Loss】《Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks》

label propagation 标签传播
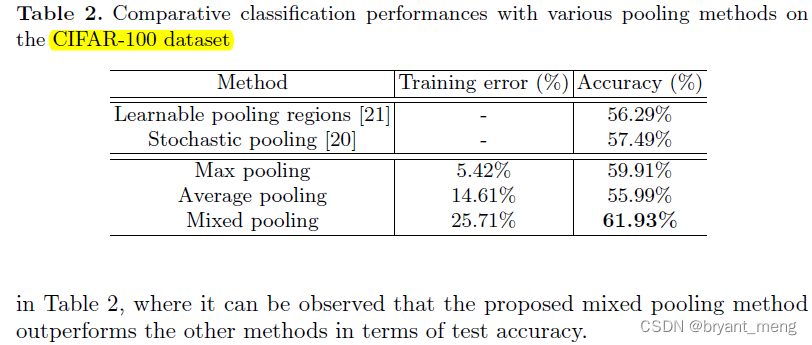
【Mixed Pooling】《Mixed Pooling for Convolutional Neural Networks》
ABM论文翻译
随机推荐
【MagNet】《Progressive Semantic Segmentation》
Eklavya -- infer the parameters of functions in binary files using neural network
论文tips
Feature Engineering: summary of common feature transformation methods
CPU register
Common CNN network innovations
Calculate the total in the tree structure data in PHP
Thesis tips
半监督之mixmatch
MoCO ——Momentum Contrast for Unsupervised Visual Representation Learning
open3d学习笔记二【文件读写】
Ppt skills
利用Transformer来进行目标检测和语义分割
Two dimensional array de duplication in PHP
[binocular vision] binocular correction
What if the laptop can't search the wireless network signal
Replace self attention with MLP
【AutoAugment】《AutoAugment:Learning Augmentation Policies from Data》
Mmdetection trains its own data set -- export coco format of cvat annotation file and related operations
【MnasNet】《MnasNet:Platform-Aware Neural Architecture Search for Mobile》