当前位置:网站首页>Robot technology innovation and practice old version outline
Robot technology innovation and practice old version outline
2022-07-07 07:26:00 【zhangrelay】
Specific reference :
tianbot_mini Robots get started ROS/SLAM/Navigation How simple it is ???

2017-2018-2019-2020 Use this version ( With ROS1 Mainly ).
2021-2022- According to the specific situation , Made many adjustments .
Course number | credits | 2 | The first semester | 6 | |||||||||
Class hours | 2 Zhou | ||||||||||||
Course type | Concentrated practical courses | Course nature | Limited selection | Assessment form | Examine | ||||||||
Prerequisite courses | |||||||||||||
It's suitable for majors | Robot engineering | Opening College | School of electrical and robotics engineering | ||||||||||
Suggested textbook |
| ||||||||||||
Main reference books | (1)Aaron Martinez, Enrique FernANdez, etc. . ROS Robot programming ( The second edition )[M]. Mechanical industry press , 2017. | ||||||||||||
Maker | Approved by | Approved by | |||||||||||
Revision period | edition | ||||||||||||
One 、 Course description
Robot technology innovation and practice courses comprehensively apply robot related foundations 、 Automatic control theory 、 Knowledge of sensor technology and other courses . Through the training and learning of this concentrated practical course , Students complete the design of an intelligent robot project 、 The implementation of , Robot system design and control technology 、 Human computer intelligent interaction technology 、 Robot Perception and information fusion technology are integrated , It can enable students to master the basic theory of intelligent robot system 、 Technology and methods , Consolidate and deepen the understanding of theoretical knowledge 、 It enhances students' application ability , Cultivate students' ability to solve practical problems , For future engineering work 、 Scientific research and the development of new technological fields , Lay a solid foundation .
Two 、 Course objectives
1. Be able to use advanced software to complete the design and development of robot system ( Corresponding to graduation requirements 3.5: It can embody the innovation consciousness in the process of designing the advanced production line system dominated by industrial robots , Judge the existing methods 、 Improve or innovate .)
2. Master the current situation of the project at home and abroad , Clearly know the advantages and disadvantages of mainstream methods ( Corresponding to graduation requirements 10.3: Understand the development trends of the international industry , Pay attention to the international hot issues of this major .)
3. Strong adaptability to industry software updates , Have a clear understanding of the development process of general methods ( Corresponding to graduation requirements 12.2: Have the knowledge base of lifelong learning , Master the methods of autonomous learning , Understand the ways to expand knowledge and ability .)
3、 ... and 、 Teaching content and basic requirements
(1) Consolidate and deepen the understanding of the theoretical knowledge learned in the classroom , And integrate theory with practice .
(2) Train students to meet their actual needs , Ability to design procedures and field commissioning procedures .
(3) Further familiar with control system analysis 、 Design and Application Technology .
(4) Cultivate students' practical and realistic working attitude , And the ability to analyze and solve practical application problems by using the knowledge learned .
(5) Cultivate students' spirit and consciousness of independent scientific research and team scientific research .
1. The teaching content of the course
This topic aims at the preliminary design and basic research of the typical robot project control system , Improve students' ability to design and develop robot software .
Yes 11 It consists of robot engineering subprojects . The contents of each project are as follows :
- 01: Use ROS、OpenCV and Dynamixel Servos Face detection and tracking ;
- 02: stay ROS Build an image like Siri The chat robot ;
- 03: Use ROS Control embedded development board ;
- 04: Use gestures to remotely operate robots ;
- 05: Object detection and recognition ;
- 06: Use ROS and TensorFlow Deep learning of ;
- 07:MATLAB and Android Upper ROS;
- 08: Build autonomous mobile robots ;
- 09: Use ROS Create a autonomous vehicle ;
- 10: Use VR Head gear and Leap Motion Remotely operated robots ;
- 11: Control the robot through the network ;
ROS Robot project practice is a practical course of learning intelligent robot technology through practical projects . This course requires ROS Knowledge . however , without ROS Experience , Need to learn in advance . The goal of the first lesson is for beginners with zero foundation . ROS Widely used in robot companies 、 Universities and robotics research laboratories , For designing and programming robots . The basic goal of this lesson is to explain through project interaction ROS. The items we are discussing here can also be reused in academic or industrial projects . This lesson discusses the ROS Various new technologies of interface . for example , You will see how to build a prototype of a autonomous vehicle , How to use ROS Develop deep learning applications , And how to ROS Write virtual reality in (VR) Applications . These are just a few highlighted topics ; Besides , You will find that using ROS And its library about 15 Projects and Applications .
Use various items after meeting the preparatory conditions . Most projects can be completed without many dependencies . Use mainstream and viable hardware components to complete most projects . So this allows us to create almost all these projects without too many difficulties .
2. Key points of the course 、 difficulty
Development and debugging practice of intelligent robot control system , Development and debugging practice of intelligent vision system , Development and debugging practice of sensing detection and data transmission system , Relevant control system development and debugging practice , Development and debugging practice of upper computer monitoring system .
3. Course teaching requirements
(1) Have a preliminary understanding of the design steps of the production line control system , Master the system design method , Deepen the understanding of professional theoretical knowledge , Be able to comprehensively use the professional knowledge learned for equipment selection and integration .
(2) Through formulating the design scheme of intelligent robot control system , Consider development comprehensively in equipment selection and integration 、 Requirements for operation and maintenance , To understand and master the comprehensive design process and method of intelligent robot system .
(3) Carry out the training of basic design skills . Such as : Calculation 、 mapping 、 Be familiar with and use design materials ( manual 、 Atlas 、 Standards and specifications, etc ) And use experience data 、 The ability of experience estimation, data processing and computer application .
(4) Understand the development frontier of advanced intelligent robot technology , Learn and master the composition and working principle of the control system based on robot and vision ; Further master the design method and debugging skills of industrial production line control system .
(5) Cultivate students' ability to consult materials and apply knowledge ; Improve students' ability to write and express reports ; Cultivate students' correct design ideas 、 Rigorous scientific style ; Cultivating students' innovative ability 、 Ability to use knowledge and teamwork .
Four 、 Course hour allocation
The innovation and practice of robot technology is based on the class hours specified in the teaching plan , Time 2 Zhou , The specific class hour allocation is shown in the table below , For reference .
Summary of teaching content | Class hours | Teaching methods | Corresponding course learning achievements | ||
lecture | experiment | practice | |||
11. Training preparation (1) Laboratory safety education ; (2) General requirements for training ; (3) Students receive practical training tasks , Search for relevant information , Familiar with the test bench . (4) Demand analysis of intelligent robot project . | 2 | 2 | Lecture | 1 | |
2. Use ROS、OpenCV and Dynamixel Servos Face detection and tracking By using ROS and OpenCV The library implements a cool project . The project essentially creates an application for human face tracking , It realizes face tracking in the way that the camera always points to the face . We will use such as Dynamixel Such an intelligent servo system makes the robot rotate on its axis . | 2 | 4 | Lecture 、 practice | 2 | |
3. stay ROS Implement an image like Siri The chat robot It can easily improve the interaction and intelligence of robots . The project is in progress. ROS Create a chat robot that can use text or voice to communicate . If you want to create social or service robots , This project will be very useful | 1 | 2 | Lecture 、 practice | 2 | |
4. Object detection and recognition Introduce interesting items for detecting objects . Will learn to use powerful ROS Package for two-dimensional and three-dimensional object recognition .. | 1 | 4 | 2 | ||
5. Use ROS and TensorFlow Deep learning This is a project developed using cutting-edge technology on robots . Use TensorFlow Kuhe ROS, It can realize interesting deep learning applications . Deep learning can be used to realize image recognition , This chapter is also about using SVM Applications for . | 2 | practice | 3、4 | ||
6. adopt Web Control robots We will see how in ROS Use in rosbridge Develop interactive Web Applications . | 2 | practice | 5 | ||
7. Program debugging Debug the program written . | 6 | practice | 4、5 | ||
8. Write intelligent robot training report and defense According to the requirements of task class and instruction class , Write training report , Prepare your defense . Each student has a separate defense , Show the control effect 、 Question answering | 4 | Lecture practice | 6、7 | ||
close meter | 6 | 26 | |||
5、 ... and 、 Other teaching links
1. Training preparation (2 Class hours )
(1) Laboratory safety education : It can not only ensure the integrity of the experimental equipment , Ensure the implementation of practical teaching , At the same time, it also cultivates students' professional quality in electrical industry .
(2) General requirements for training : Put forward requirements in all aspects of training , Clarify the training purpose and precautions in the training process .
2. Defence (4 Class hours )
Each student has an independent defense , In addition to demonstrating the effect of the comprehensive training project , Also answer teachers' questions about practical training projects and related knowledge , It is beneficial for students to consolidate and master robots .
6、 ... and 、 Teaching management
1. Training items and class hour allocation : According to the professional training plan 、 According to students' ability and acceptance , Teachers can choose the training items in the training guidance class or make certain modifications to the requirements , The class hour allocation of each practical teaching unit can be adjusted according to needs .
2. The whole teaching of this training is taught by teachers 、 Students' hands-on operation 、 The teaching method of teachers' guidance and progress .
3. This course adopts the on-site teaching method , Teachers guide students to carry out on-site practical teaching , Encourage students to study independently , Cultivate students' self-study ability , Fully mobilize students' subjective initiative in learning .
7、 ... and 、 Assessment method
1、 Assessment description
The students' grades in this course are changed from their usual grades 、 Defense Report 、 The research report consists of three parts , Among them, the usual score accounts for the total score 30%, Defense Report Of the total score 30%、 research report Of the total score 40%. The usual performance is evaluated by the usual ( Of the total score 10%)、 Periodic learning report ( Of the total score 20%) Comprehensive assessment . See the following table for specific assessment links and assessment proportion .
Assessment link | Usual results (30%) | Defense Report (30%) | research report (40%) | total | |
Usual evaluation | Periodic learning report | ||||
Assessment proportion | 10% | 20% | 30% | 40% | 100% |
Scoring criteria for system operation demonstration :
The assessment criteria of the comprehensive training report are shown in the table below .
Performance evaluation standard of training report
Serial number | requirement | The score is | |
1 | Demand analysis | According to the practical training task class , According to the requirements of production process , Conduct demand analysis ;( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) Reflect the application standards 、 standard 、 manual 、 Atlas and the ability to obtain relevant technical data by various means .( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) | 10 branch |
2 | Key link analysis | Be able to identify the key links of the system according to the task ;( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) | 5 branch |
3 | Formation and selection of preliminary scheme | Be able to determine control index requirements according to demand analysis ;( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) There are many options for the preliminary plan , After analysis, the best scheme is determined , And determine the type selection .( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) Be able to correctly analyze the key links , And propose solutions .( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) | 15 branch |
4 | Algorithm design and integration | Draw the control schematic diagram according to the specification requirements 、 Electrical wiring diagram , And connect the circuit according to the designed circuit diagram , And according to the network control requirements , Connect to the communication network .( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) With station , Detection point , Gas path , Circuit symbol ; With measured value , Given value , Control quantity dynamic point ; controller 、 Extension module 、 Selection of sensors, etc 、 install .( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) | 10 branch |
5 | Software design and debugging | Draw program control flow chart , Determine the robot's I/O, Write the control program of the robot that meets the production and control requirements , And annotate and explain the program .( nothing 0 branch ; Simple 3-5 branch ; detailed 6-10 branch ) Operating procedures 、 Safe operation 、 Emergency handling .( nothing 0 branch ; Simple 3-5 branch ; detailed 6-10 branch ) | 20 branch |
6 | Grouping Personal technical ability | The task of each member ;( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) Tasks that require team members to discuss .( nothing 0 branch ; Simple 3 branch ; detailed 5 branch ) | 10 branch |
7 | System operation demonstration and defense | According to the production process , System installation and commissioning ; Administrator and operator login function , hand / Automatic switch .( nothing 0 branch ; Simple 3-5 branch ; detailed 6-10 branch ) Communication and expression .( nothing 0 branch ; Simple 3-5 branch ; detailed 6-10 branch ) | 20 branch |
8 | Upper computer monitoring 、 System joint commissioning and improvement | Upper computer parameter setting 、 Safe start and stop 、 Run the test 、 analysis ;( nothing 0 branch ; Simple 3-5 branch ; detailed 6-10 branch ) Operation analysis and improvement ;( nothing 0 branch ; Simple 3-5 branch ; detailed 6-10 branch ) | 10 branch |
Assessment description :《 List of course assessment schemes 》 The corresponding relation of expression , It can prove that the students have passed the examination of this course , To meet the requirements of the course objectives .
2、 List of course objective assessment scheme
Assessment description :《 List of course objective assessment scheme 》 The corresponding relation of expression , It can prove that the students have passed the examination of this course , To meet the requirements of the course objectives .
List of course objective assessment scheme
Number of graduation requirements supported by the course | Course objective No | Assessment content | Assessment form | Check the raw materials ( explain : The examination paper 、 Homework 、 Experimental report 、 Technical report 、 Process record 、 Practice summary, etc , Paper or electronic ) |
3.5 | Course objectives 1 | Be able to use advanced software to complete the design and development of robot system | research report | Technical report |
10.3 | Course objectives 2 | Master the current situation of the project at home and abroad , Clearly know the advantages and disadvantages of mainstream methods | Defense Report | Summary of the defense |
12.2 | Course objectives 3 | Strong adaptability to industry software updates , Have a clear understanding of the development process of general methods | Study report | Technical report |
边栏推荐
- Differences between H5 architecture and native architecture
- 组件的嵌套和拆分
- $parent (get parent component) and $root (get root component)
- 弹性布局(二)
- [semantic segmentation] - multi-scale attention
- Mobx knowledge point collection case (quick start)
- Fast quantitative, abbkine protein quantitative kit BCA method is coming!
- 我理想的软件测试人员发展状态
- Esxi attaching mobile (Mechanical) hard disk detailed tutorial
- Dynamics CRM server deployment - restore database prompt: the database is in use
猜你喜欢
L'externalisation a duré trois ans.
【leetcode】1020. Number of enclaves
Advanced level of C language (high level) pointer
C language (high-level) data storage + Practice

面试官:你都了解哪些开发模型?
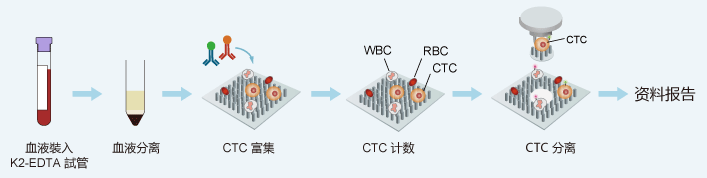
Circulating tumor cells - here comes abnova's solution
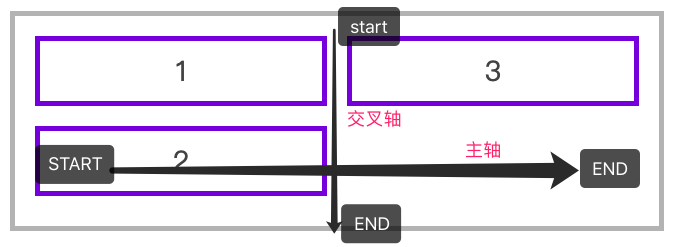
弹性布局(二)
身边35岁程序员如何建立起技术护城河?

sql中对集合进行非空校验
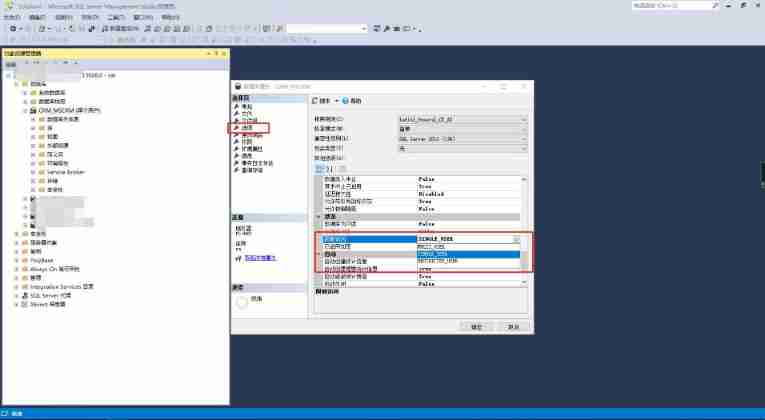
Dynamics CRM server deployment - restore database prompt: the database is in use
随机推荐
Blue Bridge Cup Netizen age (violence)
Advantages of using net core / why
Composition API premise
How does an enterprise manage data? Share the experience summary of four aspects of data governance
At the age of 20, I got the ByteDance offer on four sides, and I still can't believe it
leetcode 509. Fibonacci number
一、Go知识查缺补漏+实战课程笔记 | 青训营笔记
RuntimeError: CUDA error: CUBLAS_ STATUS_ ALLOC_ Failed when calling `cublascreate (handle) `problem solving
深度学习花书+机器学习西瓜书电子版我找到了
2、 Concurrent and test notes youth training camp notes
How to * * labelimg
A slow SQL drags the whole system down
Network foundation - header, encapsulation and unpacking
弹性布局(一)
PostgreSQL source code (59) analysis of transaction ID allocation and overflow judgment methods
Several important steps to light up the display
组件的嵌套和拆分
Select the product attribute pop-up box to pop up the animation effect from the bottom
sql中对集合进行非空校验
計算機服務中缺失MySQL服務